Sensor-based complete coverage path planning in dynamic environment for cleaning robot
2018-04-12HongLiuJiayaoMaWeiboHuang
Hong Liu,Jiayao Ma✉,Weibo Huang
Human Robot Interaction Lab,Shenzhen Graduate School,Peking University,Shenzhen 518055,People’s Republic of China
1 Introduction
Complete Coverage Path Planning(CCPP)requires robots to pass over every part of the workspace completely in collision free paths.The robot must fill the region with few overlapping paths within a limited time.Comparing with CCPP methods with stationary environments,when more computation is applied to detect the moving obstacle correctly and efficiently,the path in the dynamic environment getting from the last computing might become invalid at any time.Therefore,the algorithm requires higher efficiency to replan in real time.There are few mature methods suitable in a dynamic environment.In this paper,we focus on CCPP algorithm for cleaning robots in the environment with dynamic elements like pets and kids,for example.It is of great importance to replan effectively in order to get a safer and better path.There are many robotic applications using CCPP algorithms[1–3],such as demining robots[4],lawn mowers[5],automated harvesters[6],underwater robots[7],cleaning robots[8]and so on.
Great efforts have been made on CCPP methods in known and stationary environments[9–16].However,few method spay attention to dynamic environments with non-stationary obstacles.Luo and Yang[17]proposed a bio-inspired method where the dynamics of each position on the map is topologically organised in a network.However,in the Luo’s method,the robot is easily trapped in a situation named deadlock where all the neighbouring locations are neither obstacles nor visited locations.The network inspired by the biologic shunting model is lack of global information to escape from deadlocks quickly.
Both the single-robot based approaches and the approaches using multiple robots have been developed,such as Multi-Robot Spanning Tree Coverage(MSTC)[18],Multi-Robot Forest Coverage[19],Backtracking Spiral Algorithm Cooperative Multi-robot[20]and BoustrophedonandBacktrackingmechanism[21].These approaches reduce the coverage time in general.
In this paper,a priority template and a novel global backtracking mechanism are proposed to coverage task in a dynamic environment.To deal with deadlock problems,where all the neighbouring positions of the robot are neither obstacles nor visited locations,the robot uses a priority template to reduce deadlocks by limiting the uncertainty of directions.Meanwhile,the robot activates the global backtracking mechanism to escape from deadlocks when it is stuck.It determines the best backtracking point using a greedy criterion and plans an optimal path.Our method generates the path by incrementally repairing the path costs as new information discovered.Moreover,the proposed method can be extended to the multi-robot system,different from the single-robot system.Our multi-robot mechanism determines the best backtracking point by starting a market-based bidding process[22]among robots.The bidding process takes into account both the length of the path and the conflict with the others.
The remaining of this paper is organised as follows.Section 2 describes the assumptions,definitions and notations.Section 3 presentstheproposedmethodincludingfourparts,the introduction of short-term memory CCPP model,the global backtrackingmechanismdealingwithdeadlocks,multi-robot extension by the market bidding process and the analysis of the proposed neural-dynamics-based approach.Experiments in various dynamic scenes are implemented in Section 4.Section 5 concludes our work.
2 Assumptions,definitions and notations
Some notations,assumptions and definitions in this paper are described as follows:
2.1 Assumptions
(i)The robot obtains information on a limited range and locates itself accurately or within a tolerable error,uncertainties via its on-board sensors(e.g.radar,laser-scanner and sonar),multi-sensory fusion and simultaneous localisation and mapping are beyond our scope.(ii)The robot can move to eight potential directions(front,back,left,right,front left,front right,back left,and back right)as a real cleaning robot works in indoor environments.The algorithm also has the latent capacity to apply on three-dimensional(3D)workspace as long as extending directions with up and down.
(iii)Inmulti-robot systems,communicationbetweenrobots guarantees that each robot can share its position with the others and treat the other robots as obstacles.
2.2 Definitions
(i)The point(x,y)indicates the coordinate position of the robot in the workspace.The autonomous mobile robot is able to turn on the spot.
(ii)The 2D Cartesian workspace is modelled as an occupancy grid incrementally as the robot moves.Each grid,being regarded as a neuron,is the same size as the robot.
(iii)There are four states of neurons introduced to the CCPP algorithm,which are visited,unvisited,obstacle,and deadlock.In deadlock state,the neighbours around current position are either visited or obstacles[17].The position where the robot arrives in a deadlock situation is de fined as the deadlock position.
(iv)The backtracking position is de fined as the point which has more than one unvisited neighbour,that is to say,it can be a start point of the future coverage.
2.3 Notations
Here are some notions of the proposed method.
BTlistlist of backtracking points
Sdlstart deadlock point
Gbtgoal backtracking point
Rdlrobot who arrives in a deadlock situation
pcandidate point of Gbt
Dminminimum distance between the p and the robot
3 Proposed method
The framework of the proposed approach is illustrated in Fig.1 with a single robot case as an example.
The prior knowledge of the environment is completely unknown,by gathering the local information via sensors.The robot is expected to cover all accessible grids.The first two subsections describe the proposed CCPP algorithm in single robot case.In the bio-inspired motion coverage process,the robot covers unvisited regions by calculating the activities of the neuron network,the network was constructed by the short-memory CCPP method and with a prior template to reduce deadlocks.When a deadlock situation occurs,the backtracking process actives,this process including three steps:(i)searching for candidate backtracking points and updating the backtrackinglist;(ii)selecting thebest backtrackingpoint;(iii)planning the shortest path from a deadlock point to a backtracking point.The coverage process will not finish until all points have visited.What’s more,in Section 4,we extend the approach to the multi-robot case with a market-bidding process.Overall,the analysis of the approach in a dynamic environment is given in the last subsection.
3.1 Shunting short-memory-based coverage path planning with a prior template
A human brain could use the short-memory model[23]to deal with the information in a dynamic environment.We adapt the model to path planning problems,especially in the coverage task.
3.1.1 Landscape of neural activities:The core of the algorithm is to propose a neural network for the coverage task.The neural activities could represent the coverage state of the robot.Through the neural activity propagation,the robot will be attracted by the activities of neighbour neurons,in the way that inspired by shunting short-term memory mechanism.
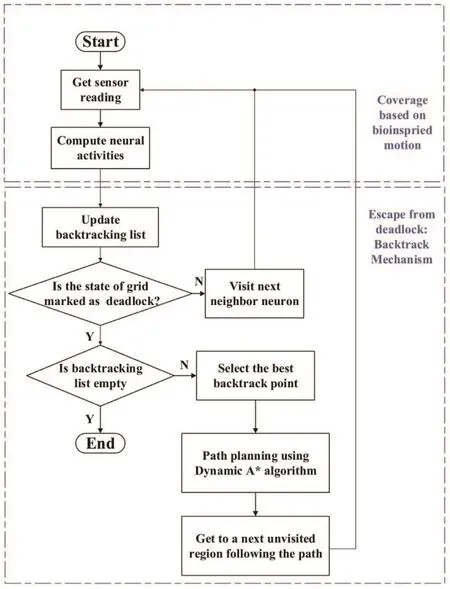
Fig.1 Flowchart of the proposed method
A short-memory model is introduced by Hodgkin and Huxley[23].It describes how information to transport between the paths of membranes in a biological neural system of humans.This model understands the real-time adaptive behaviour of individuals to complex and dynamic environmental contingencies.In[23],the neural activities across the membranes are described as follows:


We adapt this biological model to the robot coverage path planning task.The architecture of the CCPP neural network is shown in Fig.2a.
xiand xjare neural activities of the central and neighbouring neurons,respectively,with a radius r0.Central neuron represents the current location of the robot,each central neuron has only local lateral with k connections where k represents the number of directions that the robot could move.In this case,k is 8.ωijis the connection weight between central neural and its neighbour.Especially,in our CCPP neuron network,we de fine the external input Iito the ith neuron as follows:

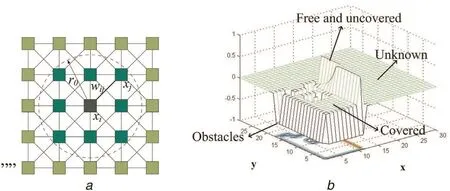
Fig.2 Landscape of neural activitiesa Architecture of a neural network with neighbouring neuronsb Neuron activities of robot different states
where E≫B is a very large positive constant,which guarantees that unvisited regions attained at the peak of the landscape and obstacles stay in the valley,as shown in Fig.2b.The connection weightωijbetweentheithandjthneuronscanbede finedas ωij=f(|xi−xj|),where|xi−xj|represents the Euclidean distance between vectors xiand xjin the state space and f(a)can be any monotonically decreasing function,such as a function de fined in this paper

whereμand r0are positive constants.The proposed method guarantees the positive neural activity propagates globally,while the negative activity only stays local.
3.1.2 Prior template:In the proposed method,we add a prior template in the process of coverage planning in order to reduce the uncertainty of directions and make the path grow like repeated mowing when the neighbour neurons have the same activities.The regularity in our prior template is the up and down.This template is triggered when the activities of neighbour neurons have more than one in rank one class after updating.In the rand one class,the robot decides to move left or right unless there is no up-and-down direction.This template is very effective in complex environments,making the path more regularly and reduces the number of deadlocks.
3.2 Global backtracking mechanism
We active a global tracking mechanism to escape from the deadlock situation quickly.Our backtracking mechanism mainly lays in two aspects:First,while updating the BTlist,a restriction is imposed according to the spatial characters.Second,a greedy criterion is used to select the best backtracking point,and then robot escapes from deadlocks by dynamic A*algorithm straightly.
3.2.1 Updating the backtracking list:Backtracking points are the points which have more than one unvisited neighbouring neurons,that is to say,the potential backtracking point can be a starting point for next coverage path.Backtracking list is a list of backtracking points which are updated as the robot moves.Once the robot moves,the states of the eight neighbours update.An unvisited point will be marked as backtracking point and added into the backtracking list.As shown in Algorithm 1(see Fig.3).Neighbour points are the 8 points around the current point(x,y).State(position)denotes the state of a neuron at the position.Activity(position)returns the neuron activity of this position.Select(backtrackinglist)selects the best point for backtracking list.Move(current,target)is a point-to-point planner.
As shown in Fig.4,the current neuron X is coloured in black and the blue dashed circle represents the reception field.Its neighbours which have already been visited are coloured in grey,and occupied by the obstacles are dashed.The neighbours X3,X4 and X5,coloured in white,are free and unvisited.Therefore,the neuron X is a backtracking point candidate,which should be added to the backtracking list.When the robot moves,the current position effects on the states of eight neighbours,so we also update the state of neighbours instantly.As the top picture to the bottom picture in Fig.4 shows the robot moves from X6 to X,the points X,X1,X7,X8 are removed from the backtracking list,the points X2,X3,X4,X5,X6,including X are kept in the backtracking list.
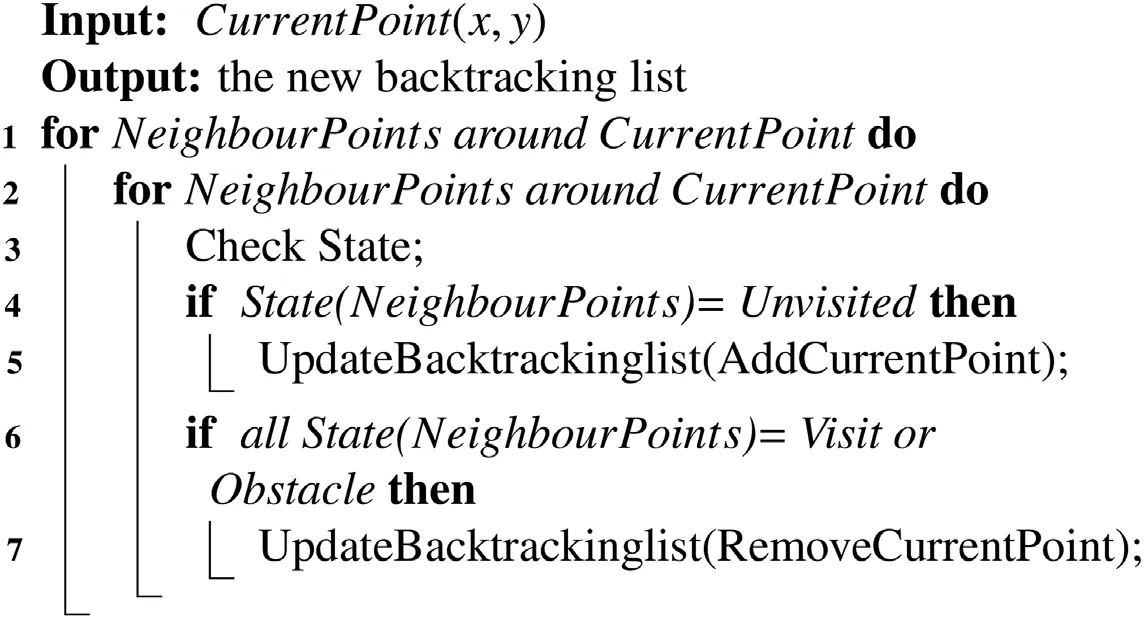
Fig.3 Algorithm 1:Updating backtracking List
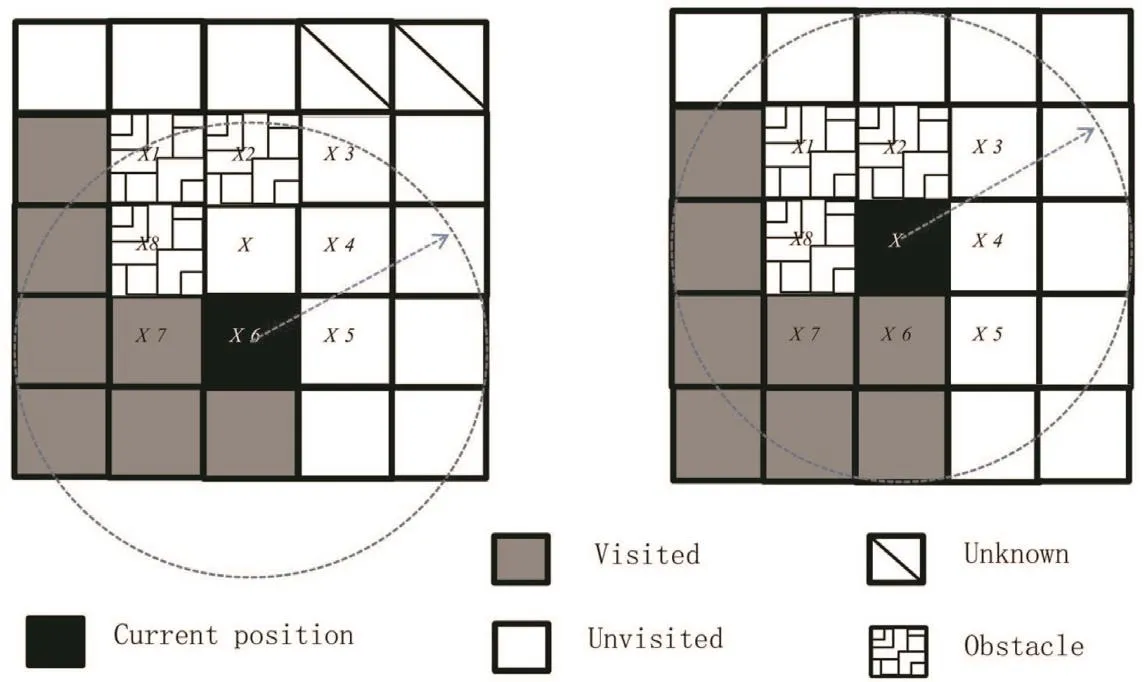
Fig.4 Illustration of backtracking list updating
3.2.2 Deadlock detection and escaping:We introduce a novel deadlock detection phase to detect the deadlock.It checks the state of the grid around the current grid,when the state is visited or an obstacle,while the activities around the current position are lower than the activity of the current grid,it meets deadlock situation.Note that when the robot has finished the coverage,the robot will also be in a deadlock situation,but the backtrack list is empty this time.This deadlock detection phase is given in Algorithm 2(see Fig.5).The phase is always on during the coverage until the end.To choose the best backtracking point,we choose the newest point in the backtracking list as the goal,directly go there using dynamic A*which could provide an optimal path.
3.3 Extend proposed method to multi-robot
In multi-robot systems,one robot needs to move as far as possible away from the other robots to avoid conflict and replanning.However,if the robots are close to each other,the proposed method with a market-based bidding process is performed to ensure collision avoidance.
In single-robot systems when the robot drops into backtracking point selecting process,we aim at choosing the best backtracking point as Gbtfor the deadlock robot Rdl,the most recent point p in the BTlistis chosen as Gbtaccording to the above discussions.However,while in multi-robot systems,the selection is more complex and can be regarded as a task allocation problem.The market-based architecture is proved to be an effective distributed mechanism for multi-robot task allocation[24],in which each robot works independently.In our market-based bidding process,each robot selects the best backtracking point which satisfies both conditions:(i)close to the deadlock robot;(ii)far away from the other robots.
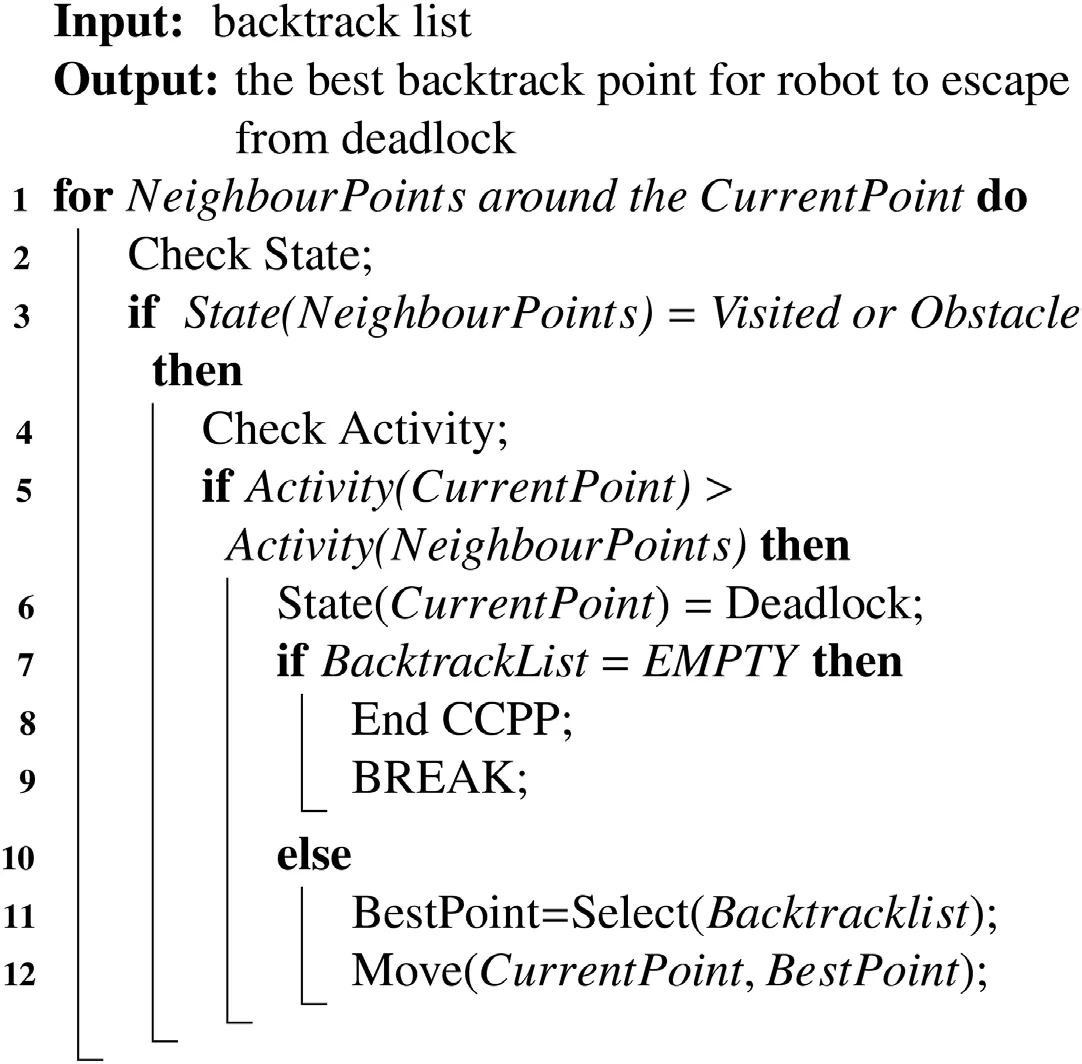
Fig.5 Algorithm 2:Deadlock detection and escaping
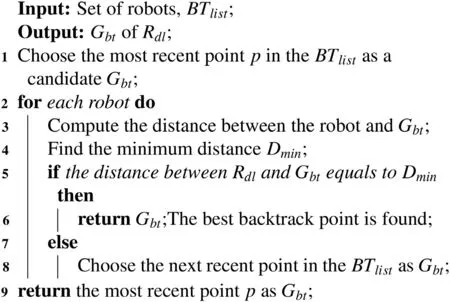
Fig.6 Algorithm 3:Bidding process in multi-robot systems
The market-bidding process work as follows:the most recent point p is just a candidate.Moreover,Gbtshould be away from the other robots so that it will not be covered by the others in a short time.Every robot computes its Euclidean distance to p as a tender price.If the tender price of the bidder Rdlis lower than any other robots,Rdlwill win the right to cover p and the region around it.In other words,p is the Gbtand the bidding process is complete.On the contrary,if the tender price of Rdlis not the lowest price,Rdlmust select the next recent point in the BTlistand start a bidding process again.However,if all the points in the BTlisthave already been considered and none of them sat is fies the above condition,the most recent point in the BTlistis chosen as Gbt.See Algorithm 3(see Fig.6).
4 Experiments and discussions
In the experiment section,we analyse the performance of our method on complete coverage path planning,three groups of experiments are conducted to evaluate the time efficiency,coverage rate and overlap rate among methods,two experiments use the single robot,one experiment uses multi-robot.Moreover,weimplement the proposed method on the real robot in an apartment-like scene.
4.1 In unknown apartment-like workspace for single robot
The first experiment is implemented to demonstrate the complete coverage in an unknown environment.In the beginning,the robot has no prior knowledge about the workspace.The sensor range is twice the size of the robot.Figs.7 and 8 show that the proposed method performs well both in easy and complex scenes.
Take Fig.8a as an example.When the robot reaches a point M(10,8)in Fig.8a-1,the dynamic activity landscape is illustrated in Fig.8a-2 with visited,unvisited,obstacle and unknown regions.The neural activities of unvisited areas have very large values represented by peak,the negative values represented the obstacles.When the robot reaches a point N(4,28)in Fig.8a-1,i.e.a deadlock situation where the neural activities of eight neighbours are all lower than the current neuron N.In the previous method,it is time consuming that neuron waits for the decay of neighbour neural activities.In the proposedmethod,the backtracking mechanism is activated here to plan the shortest path directly by using the backtracking list.The robot constructs and updates the backtracking list based on the accumulated information,and selects the best backtrack point P(4,22)by choosing the most recent point in backtracking list.Then,the dynamic A*algorithm is called to plan a short path.When the robot reaches P(4,22),a new coverage will begin.The final path is shown in Fig.8a,which illustrates that the proposed method can cover every accessible grid in the workspace.
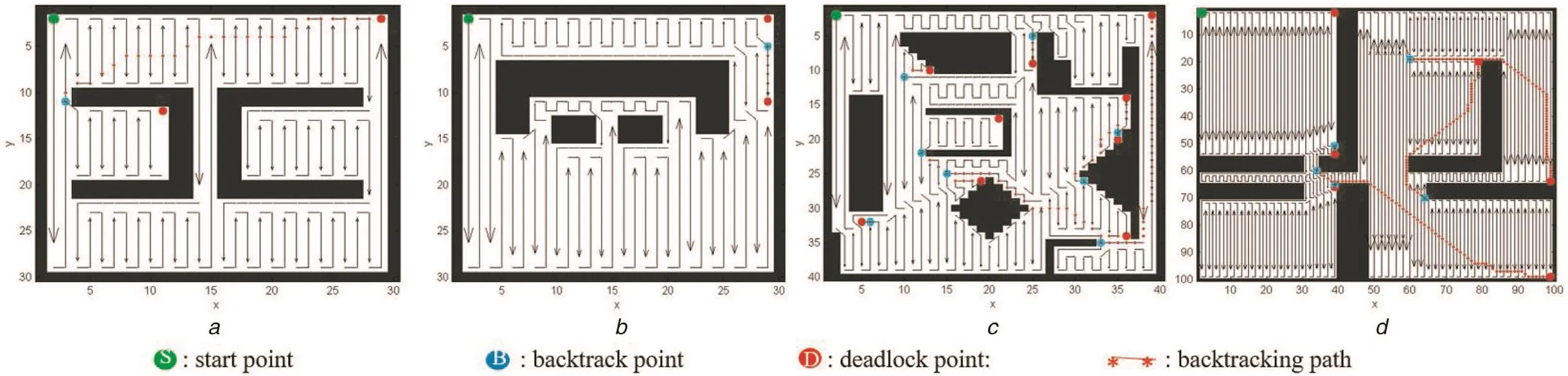
Fig.7 Experiment scenes.The back area shows the obstacles,the line with arrowheads represents the coverage paths which calculated by the proposed method.Green point is the start point,blue points are backtracking point,red points are deadlock points,right lines are the backtracking paths.There are four scenesa Double H spaceb Indoor apartment-like scene including a sofa,which can be regarded as an H spacec Scene has complex obstaclesd Large scene four times bigger than the others
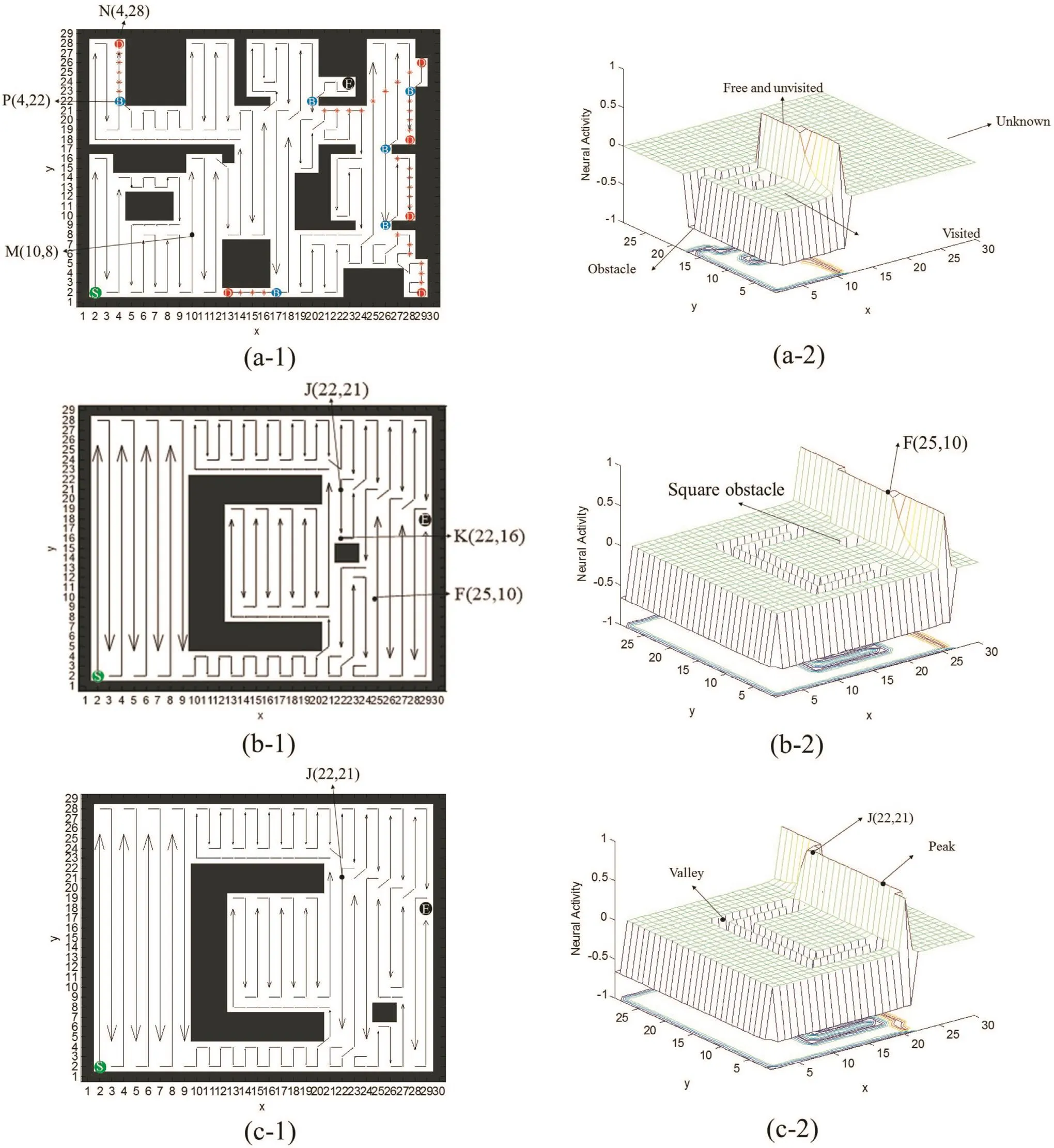
Fig.8 Complete coverage path and its neural activity landscapes in the robot current positiona Proposed complete coverage planning in an unknown environmenta-1 Path generated by the proposed methoda-2 Neural activity landscape when the robot reaches M(10,8).b Proposed complete coverage planning in an unknown environment with a non-stationary obstacleb-1 and c-1 Paths with a C-shaped and a non-stationary square obstacleb-2 and c-2 Neural activity landscapes when the robot reaches F(25,10)and J(22,21)
4.2 In the workspace with non-stationary obstacles
This group of simulation is conducted to verify the effectiveness of the proposed method in the workspace with non-stationary obstacles.A square obstacle can be detected when it appears within a certain range of detection.The obstacle is introduced into the coverage process of simulation A,as shown in Figs.8b and c and backtracking process in simulation B,as shown in Fig.9.If an obstacle moves to another position which is out of detection,the robot will not cover that region for lack of knowledge.That is beyond the scope of this paper.
Simulation A is also performed in the workspace with a C-shaped obstacle and a square obstacle,as shown in Figs.8b-1 and c-1.When the robot reaches a point J(22,21),it has not yet detected the square obstacle.The robot plans the path from J(22,21)to the bottom side.Once the robot reaches the point K(22,16),the square obstacle moves in front of the robot(compared Fig.8b-1 with Fig.8c-1).The robot cannot detect the square obstacle until it is close enough(i.e.with a radius of r0shown in Fig.4).The neural activities of the positions occupied by the square obstacle decay sharply in the valley,as shown in Figs.8b-2 and c-2.The robot cannot move forward,and hence turn left to avoid the obstacle.

Fig.9 Path using the proposed method in unknown environments with a non-stationary obstacle.Left:The path before detecting the squared obstacle.Right:The path after updating the costs
Simulation B tests the situation where the obstacle appears during the backtracking process.When the robot reaches the deadlock point V(27,2),it chooses the best backtracking point U(3,11),as shown in Fig.9.By applying the dynamic A*algorithm,as the robot moving along the path,it acquires sensor measurements and updates the costs.When the robot discovers the square obstacle,it repairs the costs and searches for a new shortest path from the current point to the goal point.The final path is shown in Fig.9.
4.2.1 Time consumptionanalysis:To show the time efficiency,we compared proposed methods with backtracking mechanism or without the backtracking mechanism in four dynamic scenes.These scenes are from easy to difficult,as shown in Fig.7.From Table 1,we can see that the more complex the scene is,the more deadlocks it has the better proposed method performs.In Fig.7c,backtracking mechanism saves 70%time.A backtracking mechanism needs extra little more storage to save backtracking list.
4.2.2Coveragerate,overlaprateandpathlength analysis:To verify the efficiency of the proposed algorithm,we conduct two versions of the proposed method(with and without backtracking).Three challenging target scenes are tested,which are shown in Fig.7.For each scene,30 different initial poses were randomly selected to get the generalised performance of the approaches.As shown in Table 2,the proposed method performs much better than the method without backtracking in terms of coverage rate and path length.Our backtracking mechanism uses a prior template can get fewer deadlocks.When a deadlock happens,our method including an optimal point-to-point path planning,which we get a shorter path length.
4.3 Experiments on multi-robot
In this subsection,the proposed method is extended to multi-robot systems which distributes the workload to multiple robots and reduces the coverage time overall.In multi-robot systems,one robot needs to move as far as possible away from the other robots to avoid conflict and replanning.
Fig.10 depicts the complete coverage paths generated by four robots using the proposed method.The green,blue,orange andblack points are covered by robot 1,2,3 and 4,respectively.Red points are the points in the backtracking paths which are covered more than once.

Table 1 Time consuming performance of proposed methods,with or without proposed backtracking mechanism
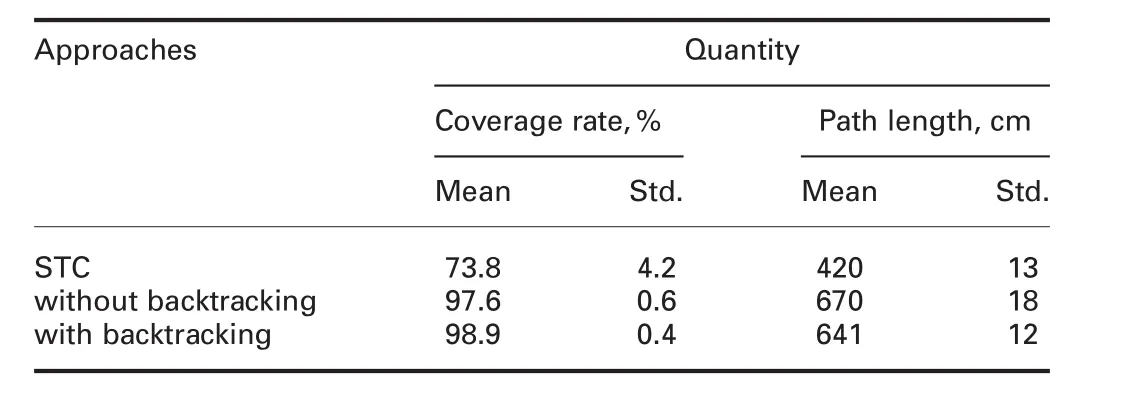
Table 2 Quantities measured during the process of three algorithms
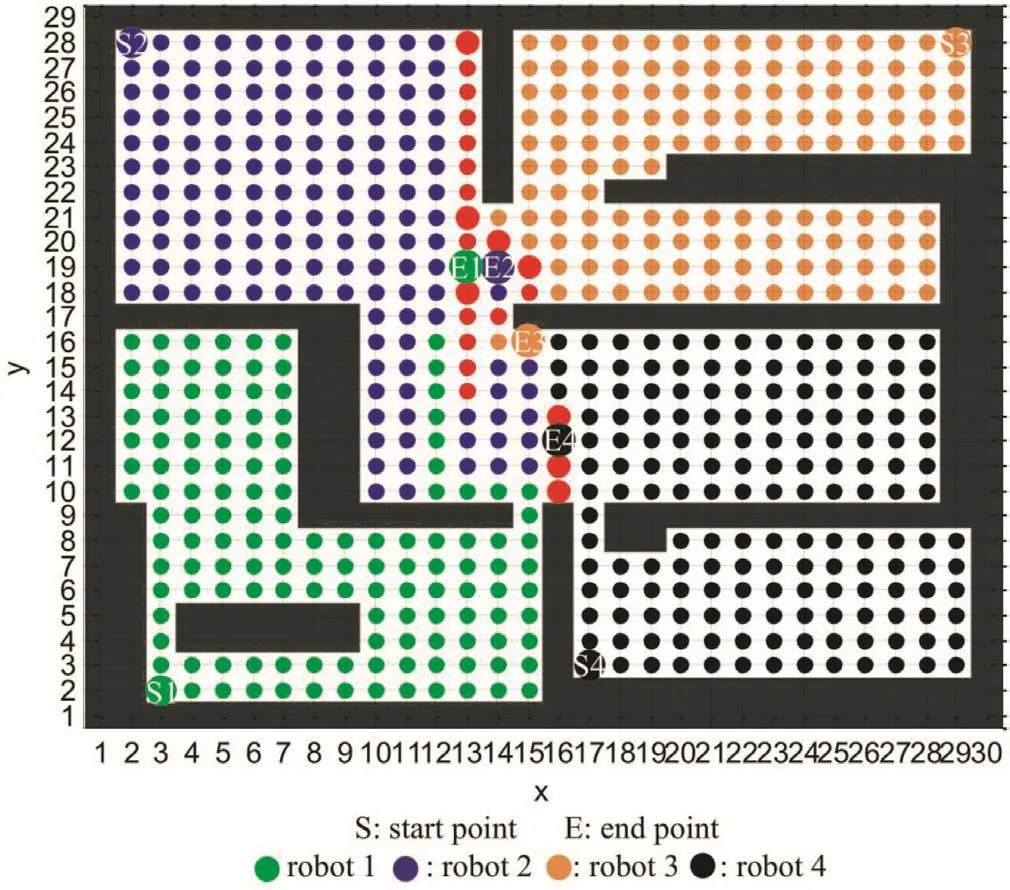
Fig.10 Coverage paths performed by the proposed method with four robots.The red points are the revisited points
We can clearly see that the algorithm is complete which covers all the accessible grids and the workload of each robot is almost balanced.Time taken by the robots is 8.86,9.25,9.17 and 9.09 s,respectively.However,for single-robot coverage,it costs 33.92 s.As a result,the coverage time is significantly reduced by deploying multiple robots.
Due to the market-based task allocation,each robot covers its area separately with few conflicts.If some robots fail,all the unvisited grids which are accessible will be covered by the other living robots.Therefore,robustness and completeness can be guaranteed.
To compare the performance of our approach with two versions of the MSTC,non-backtracking MSTC(NB-MSTC)and backtracking MSTC(B-MSTC),the total length of the coverage paths,the workload distribution of the robots and the repetition rate are calculated.Coverage paths are illustrated in Fig.11 and their length are shown in Table 3.Since the spanning tree algorithm divides the workspace into grids of a size 4D where D is the size of the robot,some grids along obstacles do not belong to the graph grid used to construct the tree.As a result,MSTC cannot cover these grids(see Fig.11),the proposed method does not have this problem due to the grid size of D.Task allocation in our approach is more balanced than two versions of MSTC,as shown in Table 3,as the backtracking mechanism assigns backtracking points to the robots until the task is complete.The coverage time(the maximum coverage time of the robots)using the proposed method is 30.31 s which is less than NB-MSTC(43.16 s)and B-MSTC(34.24 s).
However,due to the backtracking,the repetition rate of our approach is higher than NB-MSTC but lower than B-MSTC.Considering the better performance of the proposed method on the task allocation and coverage rate,the repetition rate is tolerable in real-world applications.
4.4 Tests on real cleaning robot
Experiments in a real environment are also provided.The results are shown in Fig.12.
The entire approach has been embedded into a laptop while a ceiling camera is used to extract the ground truth of the robot.The indoor home-like environment is 5 m by 5.5 m.The robot contains three infrared sensors to avoid the forward bump.A laser on the robot provides information on the surroundings.The accuracy of the robot poses estimation is a key factor affecting the overall performance of the approach.Odometry system is designed combining the measurements of the encoder and gyro which limits the estimation error within a tolerable range which is defined as the half size of a grid.The averages of the time-to-completion and coverage rate are 5 min and 92.21%,respectively.These results show that the proposed method is also applicable to cluttered indoor environments.

Fig.11 Coverage paths using the proposed method and two versions of MSTC in multi-robot systems.The red points are the revisited pointsa BNNBb NB-MSTCc B-MSTC
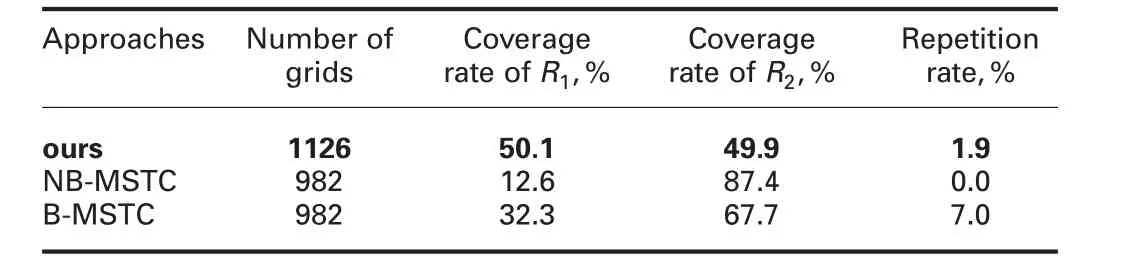
Table 3 Performance comparison between proposed method and two versions of MSTC
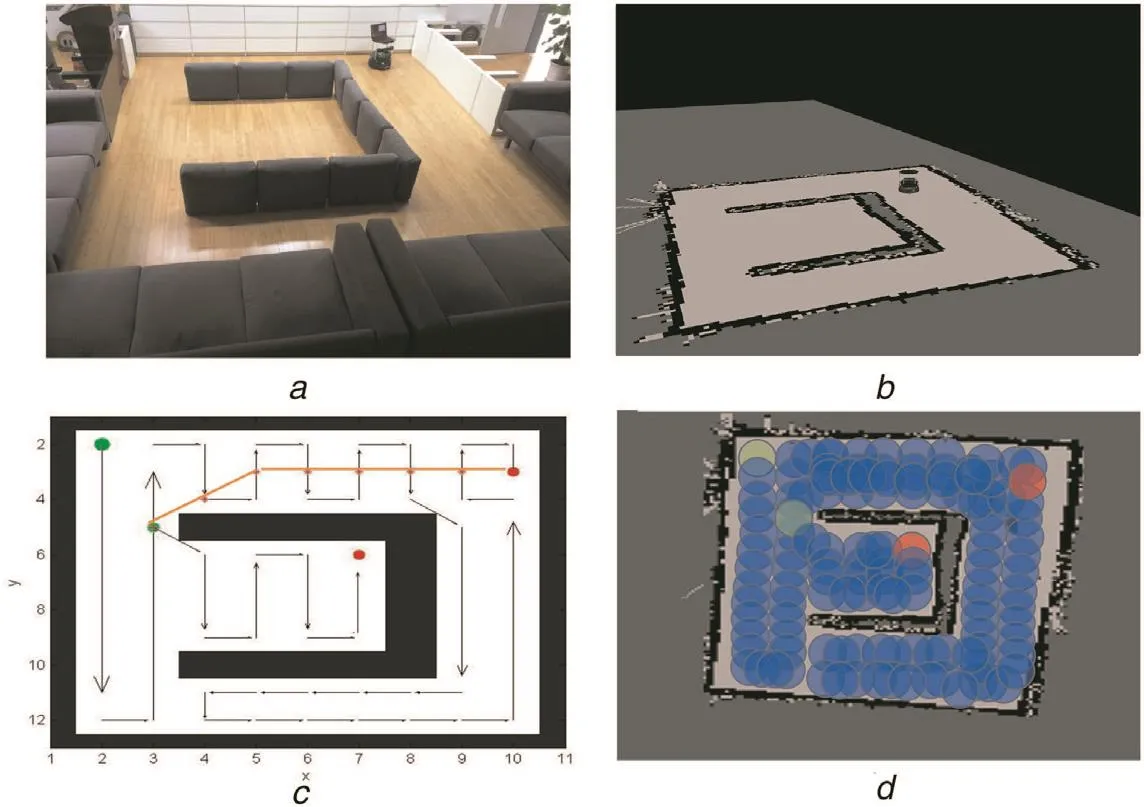
Fig.12 Real world experimentsa Real apartment-like sceneb Robot view of the scenec Proposed coverage path in the simulationd Coverage path shows in the sketch map
5 Conclusions
We present here a sensor-based CCPP algorithm which combines a bio-inspired shunting short memory method with a backtracking mechanism and prior template,dealing with a deadlock situation.Instead of waiting for the decay of activities,a backtracking mechanism is activated that it selects the best backtracking point efficiently and plans the shortest path.Experiments show that the proposed method performs more efficiently in most workspaces in terms of the coverage time and the length of coverage paths.Besides,the proposed method is extended to multi-robot systems with a market-based bidding process,and the workloads are deemed more balanced than other multi-robot approaches.For future research,we plan to consider the energy and timing constraints that allow robots to carry limited energy and to complete the coverage task before the deadline.
6 Acknowledgment
This work was supported by the National Natural Science Foundation(NSFC,nos.61340046,61673030,U1613209),Natural ScienceFoundationofGuangdongProvince(no.2015A030311034),Scientific Research Project of Guangdong Province(no.2015B010919004),Specialized Research Fund for Strategic and Prospective Industrial Development of Shenzhen City(no.ZLZBCXLJZI20160729020003),ShenzhenKey LaboratoryforIntelligentMultimediaandVirtualReality(ZDSYS201703031405467).
[1]Galceran,E.,Carreras,M.: ‘A survey on coverage path planning for robotics’,Robot.Auton.Syst.,2013,61,(12),pp.1258–1276
[2]Kurabayashi,D.,Ota,J.,Arai,T.,et al.:‘Cooperative sweeping by multiple mobilerobots’.Proc.Int.Conf.RoboticsandAutomation(ICRA),Minneapolis,MN,USA,1996,pp.1744–1749
[3]Svennebring,J.,Koenig,S.:‘Building terrain-covering ant robots:a feasibility study’,Auton.Robots,2004,16,(3),pp.313–332
[4]Acar,E.U.,Choset,H.,Zhang,Y.,et al.:‘Path planning for robotic demining:robust sensor-based coverage of unstructured environments and probabilistic methods’,Int.J.Robot.Res.,2003,22,(7-8),pp.441–466
[5]Hameed,I.,Bochtis,D.,Sørensen,C.A.G.: ‘An optimized field coverage planning approach for navigation of agricultural robots in fields involving obstacle areas’,Int.J.Adv.Robot.Syst.,2013,10,(231),pp.1–9
[6]Ollis,M.,Stentz,A.:‘First results in vision-based crop line tracking’.Proc.Int.Conf.Robotics and Automation(ICRA),Minneapolis,MN,USA,1996,pp.951–956
[7]Galceran,E.,Carreras,M.:‘efficient seabed coverage path planning for asvs and auvs’.2012 IEEE/RSJ Int.Conf.Intelligent Robots and Systems(IROS),Vilamoura,Portugal,2012,pp.88–93
[8]Hess,J.,Beinhofer,M.,Burgard,W.:‘Aprobabilisticapproachto high-con fidence cleaning guarantees for low-cost cleaning robots’.Proc.Int.Conf.Robotics and Automation(ICRA),Hong Kong,2014,pp.5600–5605
[9]Ramaithitima,R.,Whitzer,M.,Bhattacharya,S.,et al.:‘Sensor coverage robot swarms using local sensing without metric information’.Proc.Int.Conf.RoboticsandAutomation(ICRA),Seattle,Washington,USA,2015,pp.3408–3415
[10]Galceran,E.,Campos,R.,Palomeras,N.,et al.:‘Coverage path planning with realtime replanning for inspection of 3d underwater structures’.Proc.Int.Conf.Robotics and Automation(ICRA),Hong Kong,2014,pp.6586–6591
[11]Gabriely,Y.,Rimon,E.:‘Spiral-STC:An on-line coverage algorithm of grid environments by a mobile robot’.Proc.Int.Conf.Robotics and Automation(ICRA),Washington,USA,2002,pp.954–960
[12]Gonzalez,E.,Alvarez,O.,Diaz,Y.,et al.:‘BSA:A complete coverage algorithm’.Proc.Int.Conf.Robotics and Automation(ICRA),Barcelona,Spain,2005,pp.2040–2044
[13]Viet,H.H.,Dang,V.-H.,Laskar,M.N.U.,et al.:‘BA*:an online complete coverage algorithm for cleaning robots’,Appl.Intell.,2013,39,(2),pp.217–235
[14]Gabriely,Y.,Rimon,E.:‘Spanning-tree based coverage of continuous areas by a mobile robot’,Ann.Math.Artif.Intell.,2001,31,(1-4),pp.77–98
[15]Hart,P.E.,Nilsson,N.J.,Raphael,B.:‘A formal basis for the heuristic determination of minimum cost paths’,IEEE Trans.Syst.Sci.Cybern.,1968,4,(2),pp.100–107
[16]Acar,E.U.,Choset,H.:‘Sensor-based coverage of unknown environments:incremental construction of Morse decompositions’,Int.J.Robot.Res.,2002,21,(4),pp.345–366
[17]Luo,C.,Yang,S.X.:‘A bioinspired neural network for real-time concurrent map building and complete coverage robot navigation in unknown environments’,IEEE Trans.Neural Netw.,2008,19,(7),pp.1279–1298
[18]Hazon,N.,Kaminka,G.:‘Redundancy,efficiency and robustness in multi-robot coverage’.Proc.Int.Conf.Robotics and Automation(ICRA),Barcelona,Spain,2005,pp.735–741
[19]Zheng,X.,Jain,S.,Koenig,S.,et al.: ‘Multi-robot forest coverage’.Proc.Int.Conf.on Intelligent Robots and Systems(IROS),Edmonton,Canada,2005,pp.3852–3857
[20]Gonzalez,E.,Gerlein,E.: ‘BSA-CM:a multi-robot coverage algorithm’.Proc.WI-IAT,Milan,Italy,2009,3,pp.383–386
[21]Viet,H.H.,Dang,V.-H.,Choi,S.,et al.:‘BoB:an online coverage approach for multi-robot systems’,Appl.Intell.,2015,42,(2),pp.157–173
[22]Dias,M.B.,Stentz,A.:‘A comparative study between centralized,market-based,and behavioral multirobot coordination approaches’.Proc.Int.Conf.Intelligent Robots and Systems(IROS),Las Vegas,Nevada,USA,2003,3,pp.2279–2284
[23]Hodgkin,A.L.,Huxley,A.F.:‘A quantitative description of membrane current and its application to conduction and excitation in nerve’,J.Physiol.,1952,117,(4),p.500
[24]Dias,M.B.:‘Traderbots:A new paradigm for robust and efficient multirobot coordinationindynamicenvironments’.Ph.D.thesis,CarnegieMellon University Pittsburgh,2004
杂志排行
CAAI Transactions on Intelligence Technology的其它文章
- Two-phase clustering algorithm with density exploring distance measure
- Role playing learning for socially concomitant mobile robot navigation
- Self-regulation in chemical and bio-engineering materials for intelligent systems
- Multi-level image representation for large-scale image-based instance retrieval
- Text segmentation of health examination item based on character statistics and information measurement
- Adaptive tracking control of flapping wing micro-air vehicles with averaging theory