新型连杆式割草机的结构设计与运动学分析
2018-04-12娄玉印朱建华刘光浩
娄玉印,朱建华,刘光浩
( 1.广西科技大学 鹿山学院,广西 柳州 545000;2.上汽通用五菱汽车股份有限公司,广西 柳州 545000;3.柳州职业技术学院,广西 柳州 545000)
0 引言
基于世界各国对环境保护及环境绿化重视程度日益提高的考虑,割草机作为我国农业大国农业生产中的重要工具,在农业产量中起着重要的作用[1]。目前,国内外割草机大部分采用单一汽油机作为动力,以致割草机存在噪音大、体积大、笨重、割草效率低及维修难度大等缺点。
针对传统割草机的缺点,本文研发了一种2-RSS/RU多自由度可控连杆式割草机,其具有割草效率高、操作方便、安全可靠及维修容易等特点,可广泛应用于山地、平原、丘陵等场合[2-3]。本文首先根据旋量理论得出了新型空间机构割草机自由度;其次,根据高等空间机构学理论对割草机构进行运动学分析;最后,根据动力学理论结合动力学分析软件ADAMS进行验证和数学工具软件MatLab进行仿真分析,并对两种计算方式进行对比分析,验证了该新型多自由度连杆式割草机的可靠性和可行性。结果表明:该机能够满足工作要求,具有一定的应用价值。
1 结构分析
本新型割草机包括割草机车身、多向控制机构和提升机构及割草机构,如图1所示。该机构不受使用地点的限制,对任何环境均能很好适应。
割草机车身由独立的柴油机驱动,实现割草机的行走。多向控制机构由连杆一、连杆二、连杆四、连杆五组成,实现割草机的多向运动。第1支链连杆二一端通过转动副与车身相连,一端通过球副与连杆一相连,连杆一端通过球副与连杆二相连,一端通过球副与机架相连。第2支链连杆四一端通过转动副与车身相连,一端通过球副与连杆五相连,连杆一端通过球副与连杆四相连,一端通过球副与机架相连。
提升机构由连杆六、连杆七、虎克铰、连杆三组成,实现割草机的提升动作。连杆六一端通过转动副与车身相连、一端通过转动副与连杆七相连,连杆七一端通过转动副与连杆六相连,一端通过转动副与连杆三相连,连杆三一端通过转动副与车身相连,一端通过虎克铰与机架相连。
割草机构由割草刀盘、轴、机架、齿轮 一及齿轮二组成。齿轮二与齿轮一啮合,齿轮一通过轴,轴连接割草刀盘连接,实现刀盘的旋转运动。
多自由度割草机构由电动机驱动。电动机四主要控制割草机的提升运动,电动机一和电动机二控制割草机的方向控制,电动机三主要控制割草机刀盘的旋转运动。
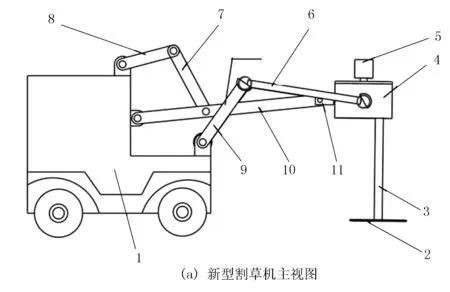
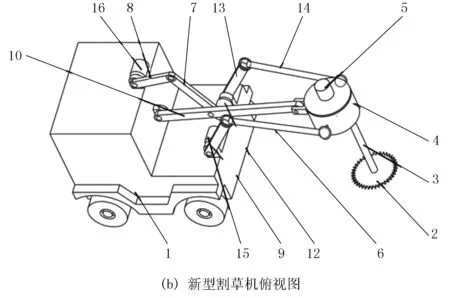
1.车身 2.割草刀盘 3.轴 4.机架 5.电动机三 6.连杆一 7.连杆七 8.连杆六 9.连杆二 10.连杆三 11.虎克铰 12.电动机一 13.连杆四 14.连杆五 15.电动机二 16.电动机四图1 新型割草机结构视图Fig.1 The structure view view of a new type of lawn mower
2 自由度计算
2.1旋量简介
任意动形式即绕某轴的旋转和绕某轴的移动的合成运动[4]。旋量由两个对偶矢量组成,即原部矢量S和对偶部矢量S0,记为
$=(S;S0)
(1)
如图 2所示,r1为轴线的一点,r为轴线的任意一点,则轴线的方程为(r-r1)×s=0,则r1为轴线通过的确定点,r是旋量轴线上的任意点, 则轴线方程为
(r-r1)×S=0
(2)
r×s=r1×s=s0
其中,s0称为轴线相对于原点的线矩。 轴线的方向和位置分别由方向矢量s和线矩s0确定。
反螺旋:当旋量$1和旋$2构成互易积为零时,$1.$2=0,称旋量$2是旋量$1的反旋量。
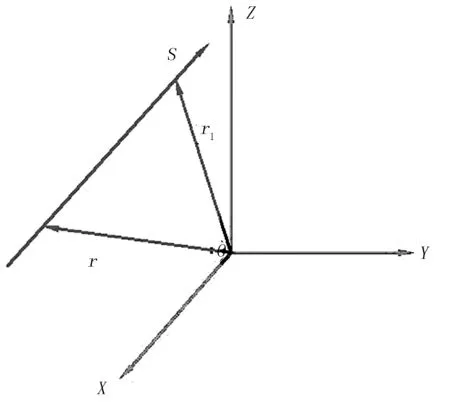
图2 旋量运动简图
2.2自由度分析
建立新型割草机旋量系结构如图3所示。

图3 新型割草机旋量系结构图
该新型机构包括3条支链,第1支链包括R11,S12,S13,建立坐标系O-X1Y1Z1;第2支链包括R21,S22,S23,建立坐标系O-X2Y2Z2;第3条支链R31,R32,并包括R33,R34,R35一条支链,建立坐标系O-X3Y3Z3。
2.2.1各支链旋量分析
1)第1条支链。
$11:(100;000)
$121:(100;0z121-y121)
$122:(010;-z12200)
$123:(001;y12300)
$131:(100;0z131-y131)
$132:(010;-z1320x132)
$133:(001;y133-x1330)
此螺旋系的最大线性无关数rank($R11S12S13)=6,为六系螺旋,无反螺旋。
2)第2条支链。
$21:(100;000)
$221:(100;0z221-y221)
$222:(010;-z22200)
$223:(001;y22300)
$231:(100;0z231-y231)
$232:(010;-z2320x232)
$233:(001;y233-x2330)
此螺旋系的最大线性无关数rank($R21S22S23)=6,为六系螺旋,无反螺旋。
3)第3支链。
对于第3支链为含有R31,R32,R33,R34组成的4R子链,此子链为阶数为3的平面机构,故不能直接通过自由度公式计算,先需转化为广义等效运动副,再计算自由度。将连杆三作为动平台,包括R31,R32,R33和R34两条支链,即
$331:(100;000)
$332:(100;0Z332-Y332)
$333:(100;0Z333-Y333)
$334:(100;0Z334-Y334)
进而得到连杆三广义运动副等效运动输出,其基为
假设U运动副分别与X、Y轴平行则第3条支链旋量可写为
$31:(100;0Z31-Y31)
$32:(010;-Z3200)
其反螺旋为
2.2.2自由度分析
由上述反螺旋可知,有3个反螺旋作用于割草机机架上,不存在公共约束和冗余约束为,即ν=0。考虑到其有两条RSS支链,即局部自由度为2,用等效运动副转化后,闭链子链等效变换后为7杆8副。
根据自由度计算公式[4](3),即
=3(7-8-1)+17-2=3
(3)
式中λ—机构的公共约束数,λ=0;
d—机构的阶数,d=6-λ=6;
n—包括机架在机构数目,n=7;
g—机构运动副数目,g=8;
fi—第i个运动副数目,fi=15,∑fi=15;
ν—机构冗余数目ν=0;
ξ—机构局部自由度数目,ξ=2。
由上述自由度加上割草机在工作过程中的旋转运动,即新型割草机总的自由度数为4。
3 位置分析
建立新型割草机矢量图,如图4所示。
3.1四连杆EFDG分析
四连杆EFDG矢量封闭方程为[5-6]
r1+r2=r4+r3
(4)
将公式(2)两边各自平方得
r2.r2=(r4+r3-r1).(r4+r3-r1)
(5)
将公式(5)展开得公式(6)得
(6)

Asinθ5+Bcosθ5+C=0
(7)

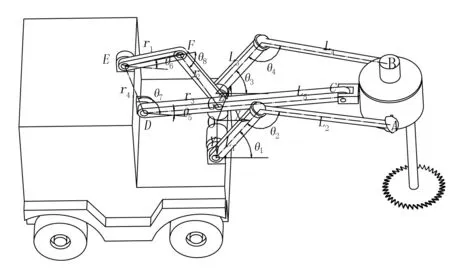
图4 新型割草机矢量图
3.2CD支链RU分析
建立CD支链方程公式,则
L5cosθ5=xc-Lx
(9)
L5sinθ5=zc+Lz
(10)
式中Lx—坐标系0-XYZ到D点X距离;
Lz—坐标系0-XYZ到D点Z距离。
3.32-RSS支链分析
建立2-RSS支链方程公式,则有
L1cosθ1+L2cos(θ1+θ2)=xA
(11)
L1sinθ1+L2sin(θ1+θ2)=zA
(12)
L3cosθ3+L4cos(θ3+θ4)=xB
(13)
L3sinθ3+L4sin(θ3+θ4)=zB
(14)
xA+xB=0
(15)
zA+zB=2zc
(16)
3.4参数尺寸
根据设计得:L1=L3=C1,L2=L4=C2,L5=C3。其中,θ1、θ3、θ6为电动机输入角。
3.5求解
当Zc=C时,则
xA=f1(θ1,θ3)
(17)
xB=f2(θ1,θ3)
(18)
θ2=f3(θ1,θ3)
(19)
θ4=f4(θ1,θ3)
(20)
4 速度与加速度分析
4.1四连杆EFDG部分
r4+r3=r1+r2
(21)
将公式(21)展开得
(22)
对公式(22)求导得
对公式(22)二次求导得
4.2CD支链RU分析
对式(9)~式(10)求一次导得
对式(9-10)求二次导得
4.32-RSS支链分析
对式(17)~式(20)求一次导得
对式(9)~式(10)二次求导得




5 仿真分析
5.1尺寸参数
根据设计得:L1=L3=300mm,L2=L4=500mm,L5=800mm。其中,θ1、θ3、θ6为电动机输入角。
5.2 求解方式
1)方式一:根据动力学理论结合ADAMS软件建立新型割草机动力学模型,如图5所示[7-8]。

图5 新型割草机动力学模型
2)方式二:运用数学工具软件MatLab对每个时刻主动杆位置角相对应的工作装置位姿不断迭代求解
3)对两种计算工具结果进行数据对比分析。
5.3求解结果
当新型割草机输出点以0.05m/s向上运动时,得电动机速度和加速度,如图6~图13所示。
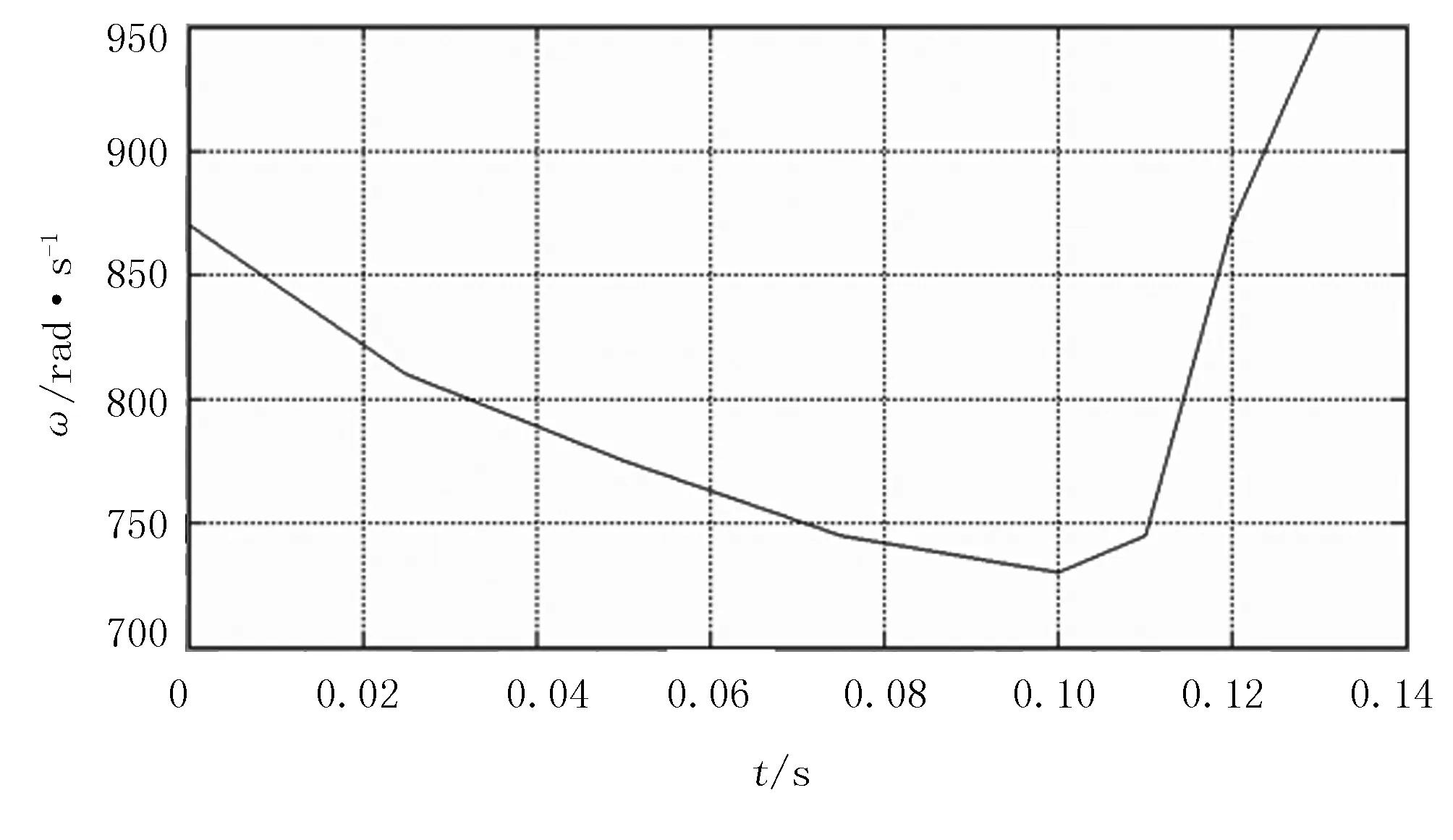
图7 电动机四速度图(MatLab图形)
经分析得:电动机四的速度由0-0.1s速度逐渐减少,0.1-0.015s速度逐渐增大。
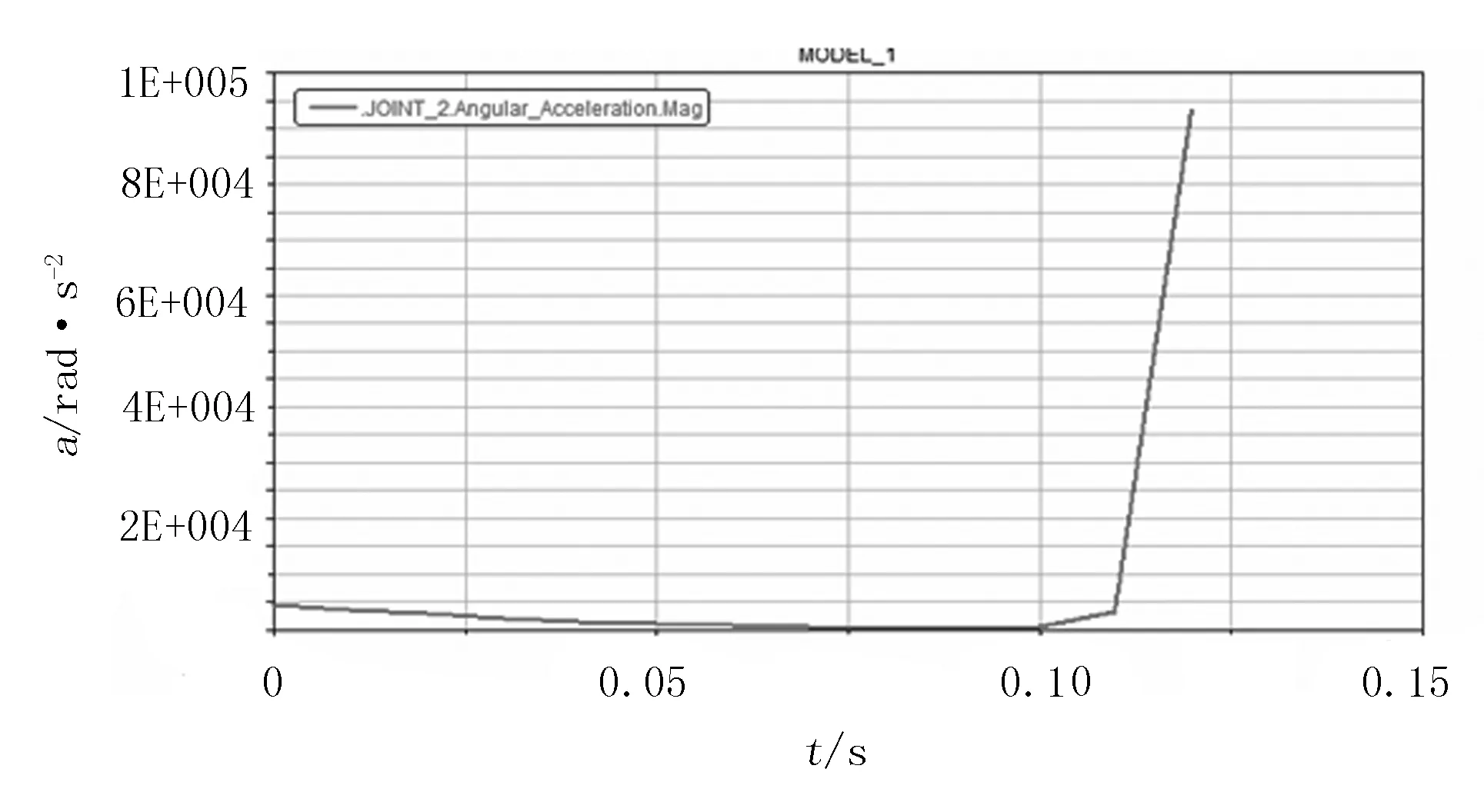
图8 电动机四加速度图(ADAMS图形)

图9电动机四加速度图(matlab图形)
经分析得:电动机四的速度由0-0.13s加速度逐渐减少,0.13-0.15s加速度逐渐增大。
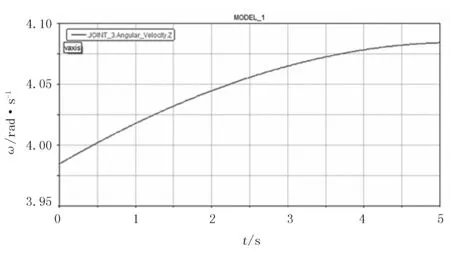
图10 电动机一和二速度图(ADAMS图形)
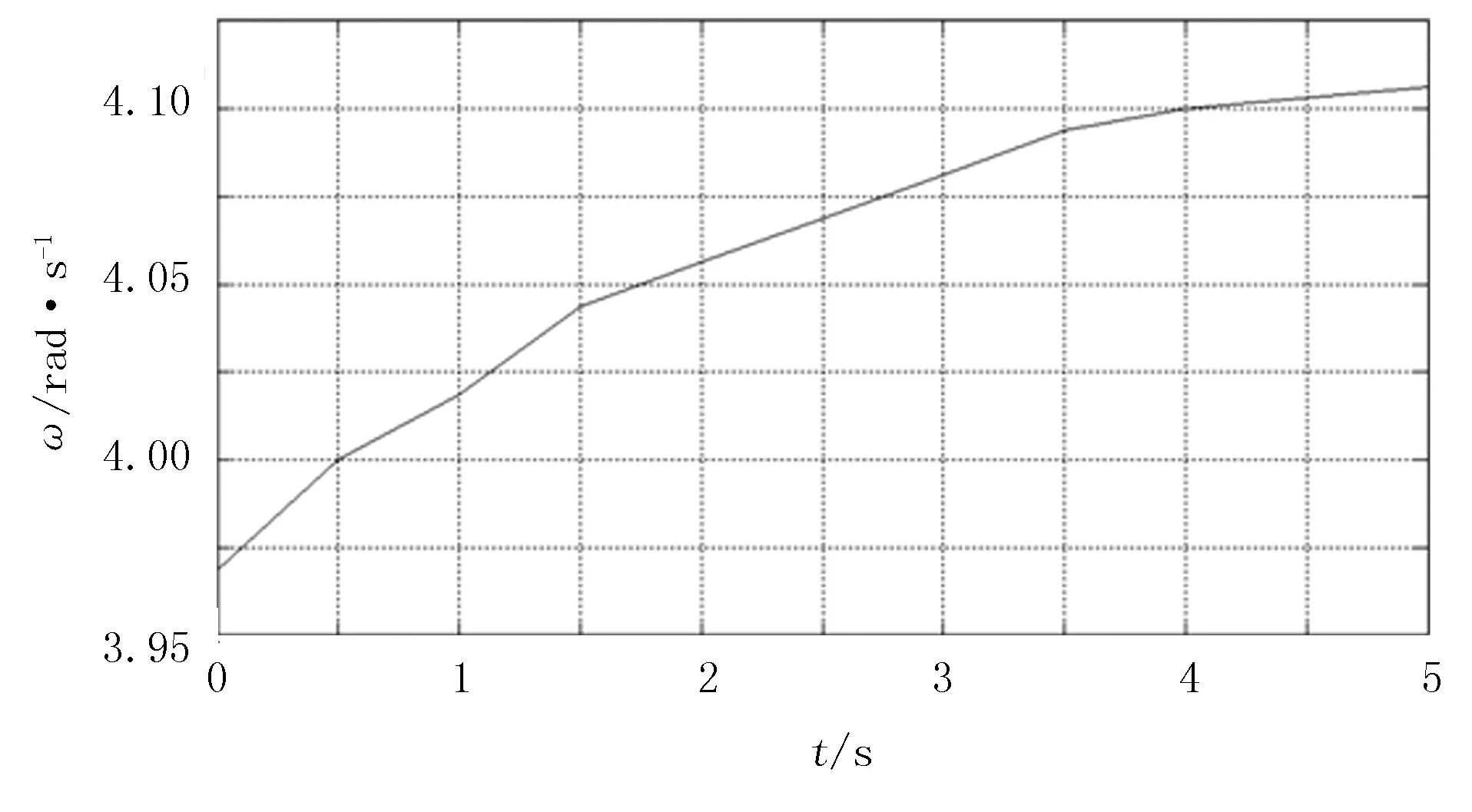
图11 电动机一和二速度图(MatLab图形)
经分析得:电动机一和二的速度逐渐增大,最后持续稳定。
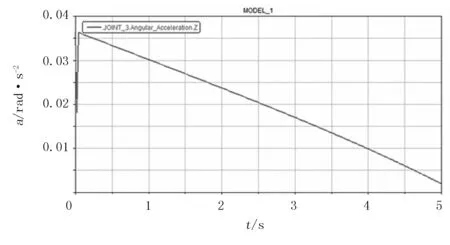
图12 电动机一和二加速度图(ADAMS图形)

图13 电动机一和二加速度图(MatLab图形)Fig.13 The Motor one and two acceleration diagram (MatLab)
经分析得:电动机一和二的加速度开始急剧下降后,逐渐增大,到持续稳定。
6 结论
1)介绍了新型2-RSS/RU连杆式割草机的结构特点和工作原理。
2)针对新型连杆式割草节的结构特点,计算出其自由度。
3)运用矢量投影法,得出了新型割草机的运动特性。
4) 运用动力学软件ADAMS和数学工具MatLab分别计算得出电动机运动特性,并进行对比,结果证明:两种计算结果数据基本一致。
参考文献:
[1]付作立. 双圆盘式刈割压扁机切割系统研究[D]. 北京: 中国农业大学,2014.
[2]孙桓. 机械原理(6 版)[M].北京: 高等教育出版社,2001.
[3]周洪,邹慧君,王石刚. 混合输入型五杆机构的分析与设计[J].上海交通大学学报,1999(7):103-107.
[4]黄真,赵永生,赵铁石. 高等空间机构学[M]. 北京: 高等教育出版社,1996.
[5]田汉民.混合输入五杆机构的分析和综合[D].天津:天津大学,2001.
[6]Tokuz,L.C. Hybrid machine modeling and control[D].UK:Liverpool Polytechine,1992.
[7]李军. ADAMS 实例教程[M]. 北京: 北京理工大学出版社,2002.
[8]陈文华, 贺青川, 张胆闻. ADAMS2007机构设计与分析范例 [M]. 北京: 机械工业出版社, 2009.
