变频空调双温差PID节能舒适技术
2018-04-10刘聚科徐贝贝宋世芳程永甫付裕
刘聚科 徐贝贝 宋世芳 程永甫 付裕
1.青岛海尔空调器有限总公司 山东青岛 266101;2.数字化家电国家重点实验室 山东青岛 266101
1 引言
用户的需求在舒适和节能两个方面都已经发生了很大的变化。
1.1 用户需求的变化
定频空调温度波动大,舒适性差,变频空调因精确控温好,舒适节能效果好,成为趋势。随着生活水平的提高,空调已从满足制冷、制热等基本需求发展到满足多种舒适性的深层次需求。
1.2 普通变频空调的局限性
目前变频空调主要以设定温度与环境温度的温差来进行目标运行频率控制以满足快速降温,但空调的出风温度7~10℃左右,强力运转时低于7℃,体感温度舒适性差,容易导致感冒等空调病健康问题。
以往针对空调病的解决方案,采用红外人感避开人体等方式往往带来空调的成本大幅提升,难于普及化。
同时由于变频空调开启短时间功率高于定频机,短时间运行耗电量高,只有运行时间长时,变频的节能效果才能突出。
本文研究了一种新型变频舒适性温控节能技术,提升出风温度,缓解空调病难题,无成本上升,且更节能,适合普及化。
2 研究思路以及方法
为了解决空调制冷时出风温度低、舒适性差的问题,我们希望提出一种舒适性温控变频技术,在达到降温需求的前提下,对出风温度进行控制,提高出风口直吹区域用户的舒适性。
为此,我们需要解决了以下两个问题:
(1)结合中标院的人体PMV舒适控制研究,了解中国人群人体最佳舒适温度;
(2)突破行业传统的温差频率控制,采用控制出风温度的舒适控制。
基于人体热舒适性的研究,行业首次提出Double Thermo-PID双温差PID联动控制技术,快速进入舒适温度,出风温度提升,有效缓解空调病,更节能,且无成本的上升。
2.1 中国人体最佳舒适PMV模型
国际上衡量人体舒适性的方法主要以丹麦工业大学Fanger教授所提出的PMV模型为依据,利用人体热感觉指标,以人体热平衡为依据,结合心理学的主观感受,得出一个综合性的热舒适方程来评价室内环境的热舒适性,其值可由室内空气温度、室内空气相对湿度、室内风速、室内平均辐射温度、人体服装热阻及人体代谢率6个参数计算确定。但是Fanger教授所提出的PMV模型时以欧美人体为模型,不符合中国人体质,我们通过理论计算、入户调研及实验测试,得出了适合中国人体质的PMV模型。其中图1为用于进行测试的用户体验实验室,图2为研究过程中使用的舒适性温度研究方法流程图。
国际上的PMV模型如下:
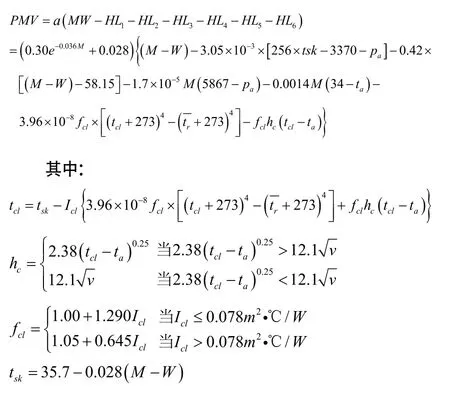
式中:PMV——预计平均热感觉指数;
Icl——服装热阻,m2•℃/W;
v——空气流速,m/s;
pa——水蒸气分压,Pa;
tsk——平均皮肤温度,℃。
其中tcl和hc由迭代法得出,tsk通过平均皮肤温度与产热率的线性回归式得出。
修正后的PMV方程为:


图1 用户体验室照片

图2 舒适性温度研究方法流程图
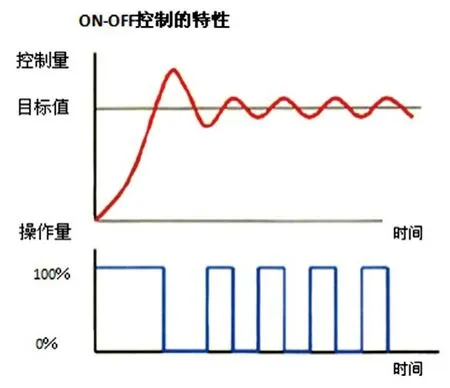
图3 查表式模糊控制方法及效果

表1 根据修订的PMV计算公式的计算结果

表2 根据修订的PPD计算公式的计算结果
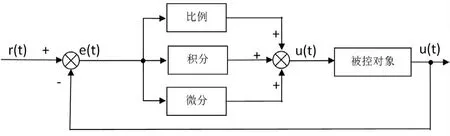
图4 模拟PID控制系统原理框图

图5 增量式PID控制系统框图

图6 双PID控制框图
式中:a、b——热敏感特性系数、热感觉特性系数,不同工况下取值不同;
c、d——皮肤温度回归系数,不同工况下取值不同;
tsk——皮肤平均温度,℃;
tcl——服装外表面温度,℃;
PMV——修正预测平均热感觉系数;
Icl——服装热阻,m2•℃/W;
v——空气流速,m/s;
pa——水蒸气分压,Pa。
2.2 双温差PID控制原理
目前空调行业对于室内温度的控制多采用查表式模糊控制方法,查表式模糊控制方法由于其频率值为预设值、不可调。在控制时,控制量未达到目标值时、操作量开,控制量接近目标值时、操作量关。单纯通过开关(ON/OFF,如图3所示)来控制时,控制的操作量在0~100%之间来回进行,所以操作量变化过大,由于不停地重复偏离实际的目标值,在目标值的附近容易重复高低不平的控制。由于查表式模糊控制方法这种弊端,在室温控制上(即进风温度的控制),我们放弃了这种尽管调试简单但舒适性差的方案,决定采用基于用户设定温度的与实际进风温度差值的PID频率控制方法。
2.2.1 模拟PID控制系统
常用的PID控制系统原理框图如图4所示。
输入量r(t)与控制系统输出值c(t)的差值成为偏差e(t)=r(t)-c(t)。
将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,构成PID控制器。其控制规律为:

其中,Kp称为比例系数,TI称为积分时间常数,TD称为微分时间常数。
2.2.2 位置式PID控制器
在实际控制中,需要采用计算机进行数据计算处理,而计算机只能采用采样的控制方法,由采样时刻的偏差计算出采样时刻的控制量,所以需要将模拟PID控制系统进行离散化处理,
我们用一系列的采样时刻点nT代表连续时间t,用求和式代替积分,用斜率代替微分,则式(1)可离散化为:

式中,T为采样周期,如果采样周期T足够短,就能保证离散处理的精度。将e(nT)简化表示成e(n),省略掉T,则可得离散式的PID控制算式为:

其中,n为采样序号,n=0,1,2……;u(n)为第n次采样时刻的计算机输出值;e(n)为第n次采样时刻输入的偏差值;e(n-1)为第n-1次采样时刻输入的偏差值。
控制量的输出值u(n)直接控制执行机构的动作,每次计算的输出值u(n)对已执行机构的实际位置,所以我们称式(3)或式(4)为位置式PID控制方法。
位置式PID控制算法,每次输出均与过去的状态有关,需要将每次的输入偏差e(n)累加,CPU的运算量较大,同时,因为位置式PID控制算法每次计算的输出u(n)直接对应执行机构的实际位置,在一些特殊情况下,出现计算错误时,控制输出u(n)将产生大幅度的变化,从而导致执行机构位置发生剧烈变化,这种情况在实际生产中可能会造成巨大的生产事故,是绝对不允许的,所以就有了增量式PID控制算法。
2.2.3 增量式PID控制算法
增量式PID控制算法是指控制器每次输出的只是控制量的增量Δu(n)。当执行机构需要的是控制量的增量(例如驱动步进电动机)时,可由式(4)导出提供增量的PID控制算式。根据递推原理可得

式中:Δe(n)=e(n)-e(n-1), Δe(n-1)=e(n-1)-e(n-2)
式(6)称为增量式PID控制算法,如图5。
采用增量式算法时,计算出的控制增量Δu(n)对应的是本次采样时刻执行机构位置(例如压机频率、阀门开度)的增量。对应执行机构实际位置的控制量,即控制量增量的积累需要采用有积累作用的原件(如步进电机)来实现;而目前较多的是利用算式u(n)=u(n-1)+Δu(n)通过执行软件来完成。
而在进风温度控制算法中,我们采用的也是增量式PID控制方法,由于制冷与制热的增量式PID原理相同,仅在计算时需要根据测试结果进行调整,所以以下内容仅以制冷PID频率控制进行展开,需要特殊处理的地方,后续会进行区分。
认为制冷时室温偏差e(n)=Tai(n)-Set(n),其中Tai(n)表示第nT采样时刻的室内环境温度,Set(n) 表示第nT采样时刻的设定温度。记Δe(n)=e(n)-e(n-1)表示第nT采样时刻偏差的变化量,其中,e(n-1)表示第(n-1)T采样时刻的偏差,即e(n-1)=Tai(n-1)-Set(n-1)。
则第n次采样周期实际的频率输出量f(n)=f(n-1)+Δf(n),室温控制中f(n-1)为压机实际返回频率。Δf(n)的正负,取决于四个采样周期的偏差值e(n)及Kp、Ki和Kd的大小 ,同样何时开始降频也取决于这几个参数 。
制热PID频率计算的基本公式同上述相同,只是在应用时需要室温偏差更改为e(n)= Set(n)-Tai(n)。
该增量式PID控制算法以设定温度与室内进风传感器检测温度的温差值作为偏差,基于该偏差对压缩机频率进行PID控制,该控制方法能够最大限度的消除控制静差,实现0.1度精确控温。同时控制算法在保证室内温度快速达到设定温度的前提下,使压缩机以一种不停机的低频长期稳定运行,同时又能在房间温度变化时快速响应,使温度维持在设定温度上,没有温度波动,人体感觉舒适。

图7 房间温度对比

图8 出风温度对比

图9 功率对比

图10 单PID制冷(左边)与双PID制冷(左边)距离地面1米处温度场
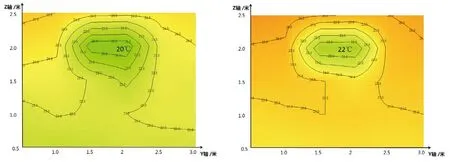
图11 单PID制冷(左边)与双PID制冷(左边)距离空调1米处温度场
2.2.4 双PID技术调节出风温度满足特定人群需求
全程PID控制方法连续调频的特点,将房间温度精确的控制在目标值上,即便是在房间热负荷发生变化时也能够响应,实现恒温控制,这有效解决了查表式模糊控制方法易超调、舒适性差的问题。但是还没有解决出风温度过低、直吹区域用户不舒适的问题。特别是对于一部分免疫力较低人群如孕妇、婴幼儿及老人等,如果长期处于空调直吹区域,易产生头疼、头晕和鼻塞等空调病症状,对于这部分特殊人群而言,其不需要很低的房间温度,首要需求是舒适。但是其舒适的房间温度是多少,我们无法简单判定。为此,我们进行了“家用空调温度场舒适性测评研究”,率先提出了适合中国人体质的PMV模型,同时提出了针对这部分人群的最佳舒适温度。结合该成果,我们在全程室温PID频率控制的基础上进行迭代优化,提出了一种基于出风温度的双PID控制方法,智能调节室内温度和出风温度,使用户即使长期待在空调房内,仍能感觉舒适和健康,满足特定人群的个性化需求。
2.3 家用空调温度场舒适性测评研究应用
通过中标院的研究,我们得到了在夏季适合中国人体质的PMV和PPD结果,其值如表1和2所示。通过表中数据,我们能够得到在夏季对于大部分人而言的舒适温度是27.1℃左右(平均PMV=0.01,平均PPD=5.52)。
根据上述研究成果,我们得出了在夏季适合中国人的房间舒适温度27.1℃,如果我们将房间温度控制到舒适温度上,就能满足大部分人群的舒适需要,此时可以将控制的目标转向出风温度,提高出风口正对区域的用户舒适度。为此,我们提出了双PID控制方式,一个PID以室内温度为控制对象以使房间大部分区域的温度快速降至舒适温度,另一个PID以出风温度为控制对象,在达到舒适温度后,控制出风温度适当提高,提高出风口正对区域的用户舒适度,两个PID同时作用实现舒适制冷。
首先我们选取适宜的温度作为人体舒适温度。之后,再确定适宜的出风温度,而出风温度主要通过室内盘管的温度体现,室内盘管温度决定空调出风温度的舒适性,且合适的盘管温度能够决定空气冷凝的效果,保证有效除湿。
当室温温度大于等于人体舒适温度时,只进行室温PID算法,使房间温度快速稳定地降温,此过程房间温差较大,暂不启用室内盘管温度PID算法。当房间温度接近人体舒适温度时,启用室内盘管温度PID算法,此时由室内盘管温度PID算法和室温PID算法共同作用,取两种PID算法的较小频率来决定空调运行频率。如果由于外界干扰(如开窗、室内人员增加等因素)致使房间室内温度过高,此时退出盘管PID,只使用能够快速降温的室温PID。此方法目的一是室温高时空调能及时降温,二是降温的同时空调盘管温度可以稳定在目标盘管温度,实现空调出风温度舒适的效果
具体地,不论哪一种PID控制方式都是以控制量与目标值的偏差值大小为依据进行调节,所以在以下表示时,都用e(n)表示第nT采样时刻的偏差,Δe(n)表示第nT采样时刻偏差的变化量,Δu(n) 表示第nT采样时刻的频率增量,所不同的是,用增加上标“’”表示盘管PID频率控制中的量。
即在室温PID控制中,有

其中Tai(n)是室内温度,Set(n)是用户设定温度,T盘(n)是盘管温度,T盘set(n)是盘管的目标温度。
控制示意图如图6所示,当房间温度较高时,使用室温PID控制,当房间温度达到舒适温度后,开关S1闭合,控制盘管温度维持到目标值上,提高出风口温度。对于盘管的最优温度选用多少,不同的机型和系统会有轻微差别,一般情况下,我们选取合适盘管温度,在保证出风温度的前提下,又能很好的冷凝、除湿。
3 研究测试结果
要应用好双温差PID联动控制算法,单单有理论模型是不够的,需要进行大量的实验,将PID参数整定合适,只有在大量实验测试的基础上,将单个PID的效果发挥到极致,才能在此基础上将双温差PID控制使用出1+1>2的效果。后附PID理论应用的改善路线和参数测试整定过程如下。
典型实验:单PID制冷与双PID制冷对比测试
工况:室内初始温度30度,墙体温度30度,室外工况温度35度,单PID设定温度24度与双PID设定24度,高风 。
通过房间温度对比曲线图7可以看出,普通制冷模式下,用户设定24℃,由于冷空气比重大,房间平均温度低至22℃;而双PID控制通过一键设定,使房间温度迅速降至27.5℃,之后房间温度维持在人体舒适温度24℃~26℃左右,舒适性好。
通过出风温度对比曲线图8可以看出,单PID控制制冷出风温度低至7℃,直吹区域用户不舒适,双PID控制制冷出风温度维持在14~16℃,提高了空调直吹区域用户的体验,可以有效降低空调病发生的概率。
通过功率对比曲线图9可以看出,单PID控制始终以进风传感器值为目标,冷量输出过多,功率消耗大,但房间温度已经远低于用户舒适温度;而双PID控制在房间温度达到舒适后快速降频,功率消耗小,更省电,省电率高达31%。
通过距离地面1米的横平面图10和距离空调1米的纵平面温度场图11看,双PID制冷较单PID制冷将空调正对区域的房间温度提高了2~3℃。
4 结论
本文基于中国人体的PMV舒适模型,首次提出环境温度和出风温度的双温差PID控制技术,在快速达到人体最佳舒适温度的前提下,提升出风口温度,有效解决空调病等问题。测试结果表明,该控制方法满足中国人体最佳的舒适温度,同时开启运行3小时内节能效果显著,省电率高达31%。
[1] 陈里. 空调吹出一身病[J].中国药店,2005(8):96-98.
[2] 李兆坚,江亿. 住宅空调方式的夏季能耗调查与思考[J].暖通空调,2008,38(2):37-43.
[3] 贾庆坚,杨九铭,赵夫峰等. 家用空调器舒适性问题探讨[J].建筑热能通风空调,2010,29(3):63-66.
[4] 张继刚. 壁挂式空调房间内流场温度场特性与人体热舒适的研究[J].山东大学,2007.
[5] 尹炜. 船用凝汽系统动态建模及控制方法研究[C].哈尔滨工程大学,2008.
