Trimble三维激光扫描在玻璃幕墙设计及安装中的应用
2018-04-08白永青杨雪姣
白永青,杨雪姣
(1. 上海飞耀岩土工程有限公司,上海 200124; 2. 北京麦格天渱科技发展有限公司,北京 100043)
幕墙设计及安装是幕墙行业兴起的新方向,传统的幕墙设计是在拿到建施图和结构图以后,进行幕墙施工图与加工图的深化设计,是建筑图基础上的二次深化。但随着建筑业的发展,为缩短建筑工程的设计周期,提高整体效率,同时为了减少设计院的工作量,降低设计成本,越来越多的幕墙工程需要进行方案设计,通过方案设计的推进来降低施工图设计的周期与成本[1]。
在实际的建筑施工中,建成的幕墙安装结构框架有时会由于某些不可避免的原因而与设计模型产生一定的偏差。如果继续以原始设计模型或图纸为基础进行幕墙施工,可能会导致玻璃幕墙的设计尺寸超过现实安装所允许的误差限值。而如果使用常规的全站仪去测量竣工建筑,又面临着测量点太多、重新建模难度大等问题[2]。实景复制(三维激光扫描)技术的发展,完美地解决了这一问题,既提高了外业测量的效率,保证了数据采集的精度,又减小了逆向模型建立的难度[3-4]。
1 解决方案
解决方案主要包含:测量扫描、模型设计、坐标匹配、检测分析。流程如图1所示。
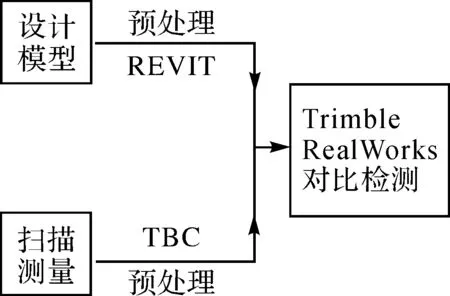
图1 流程
1.1 外业扫描
施工现场提供两个已知点(分别为BY02、BY03)以供使用,使用Trimble SX10影像扫描仪(简称SX10或仪器)进行外业操作。使用Trimble SX10,可以将工地坐标系引入扫描工程,实现全测区的三维扫描,以及重要地形点和转点等的棱镜观测。
本次外业共扫描6站,分别为已知点设站BY02、BY03,转点设站ZD02、ZD03,自由设站STATION001、STATION002,测站分布如图2所示。
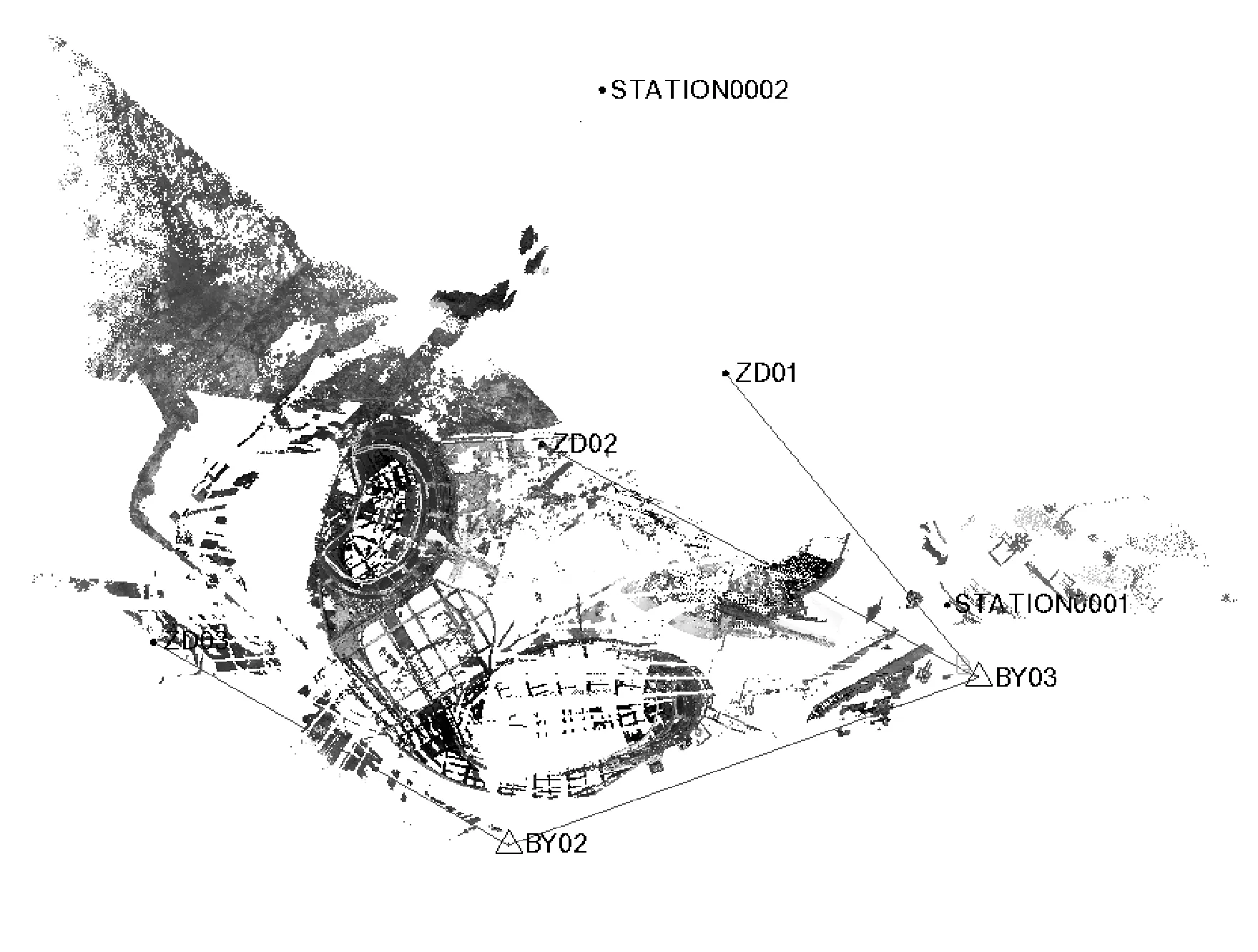
图2 测站分布
1.1.1测站设立
SX10可以使用传统的全站仪测绘流程,采用极坐标法引入工地坐标系作为坐标系统;也可以自由设站,观测两个以上已知点进行后方交会。测站设立方法与全站仪完全一致[5]。如果需要现场建立大地坐标系,SX10可以在配套tablet控制手簿及Trimble Access控制软件的协助下,实现与GNSS接收机的联动作业。将配套360°棱镜和GNSS接收机安装在同一根对中杆上。在定位的同时完成观测,快速建立控制网。
具体操作为:仪器架设在BY02点,整平、对中、量取仪器高(可选量取真高或斜高并在操作手簿选取对应方式),在操作手簿输入已知点BY02的坐标值和仪器高,跳转后视点界面,仪器镜头转向后视点BY03,输入坐标值,照准后视360°棱镜并锁定目标,输入目标高,点击测量,操作界面跳转显示测量误差,如误差超限,则取消接受并检查可能的操作错误,若在规范要求范围内,可确认完成测站设立。
1.1.2三维扫描
SX10在扫描时,可以先快速测量目标物与仪器的最远距离,自动计算出不同档位下的点密度,为现场扫描提供指导,保证数据达到可用的密度。同时SX10的免棱镜扫描模式,测角精度为1″,测距范围超过600 m,能够在400 m扫描目标保持毫米级精度。
具体操作为:测站设立后,选择扫描进入界面,在操作手簿可视窗口,利用多边形区域选择所需范围,实时测量目标距离,根据需求选定点云扫描密度选项。同时可选是否获取全景照片,如果拍照则可设置相机相关参数,设置完成后扫描,仪器开始自动转动获取点云。
1.1.3地形点、转点测量
对于施工环境复杂且容易被现场环境遮挡的重点点位,可以使用Trimble的高精度全站仪功能,利用棱镜测量模式进行作业,测距精度为1 mm+1.5×10-6D,并有棱镜自动寻找与锁定及伺服自动旋转跟踪功能。除此之外,在BY02点设站作业时,需在合适地点标定出转点ZD01—ZD03,以备后续在转点设站继续进行扫描操作,从而获取整体测区的全面数据成果。
1.1.4自由站扫描
本次测区内环境复杂,如果需要在某块没有控制点的区域单独补充扫描,可采用SX10扫描仪自由设站与内业测站配准的方式进行数据完善,这样既能提高效率又能保证所需成果的完整度。
1.1.5影像拍摄
SX10在进行扫描作业时,可以选择同时拍摄影像,以获得彩色点云[6];也可以单独进行全景拍摄和细节拍摄。全景拍摄采用的主相机可以拍摄出单反级别的彩色效果。而望远镜相机在50 m处的每个像素能够精确到0.8 mm,还可以获取1000 m外的目标物细节。如图3所示。
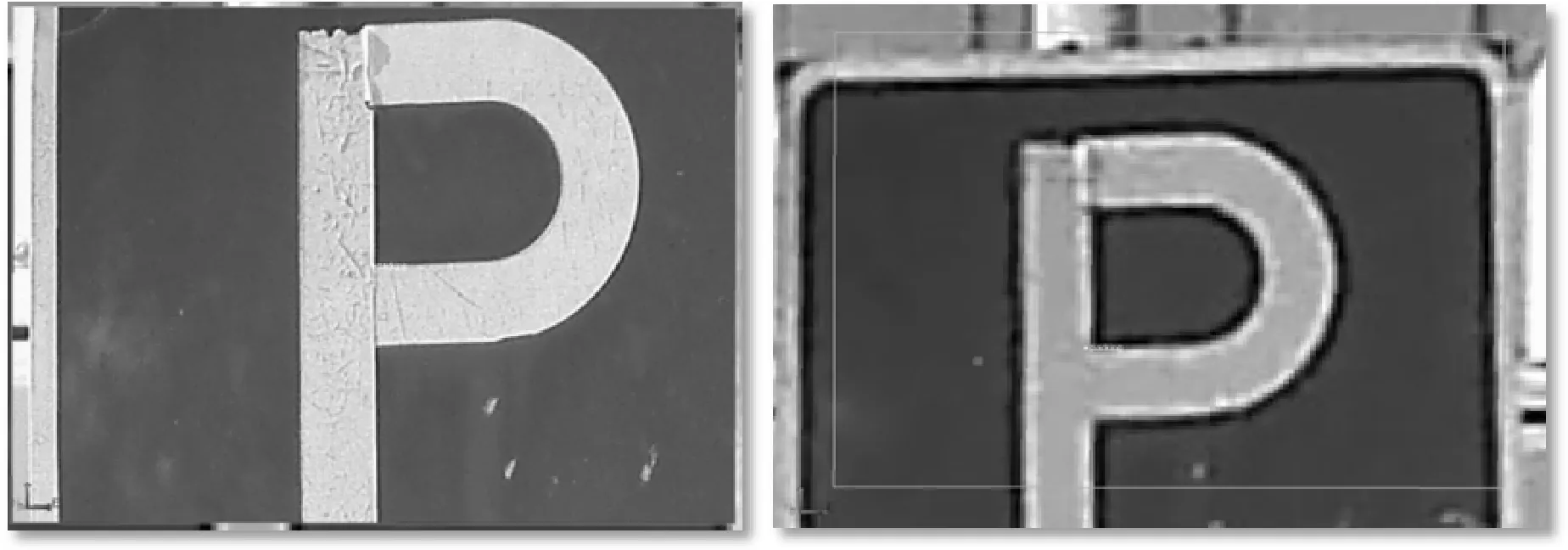
图3 望远镜相机与主相机
1.2 点云预处理
点云数据处理使用Trimble Business Center(以下简称TBC),可以对点云数据进行精度优化和评价,拼接自由测站,自动分类、噪点剔除、取样抽稀、导出。如图4所示。
(1) 精度优化。使用TBC对已经定位的测站实现网平差,对自由扫描测站自动拼接[7-8],并生成点云精度报告。
(2) 自动分类和噪点剔除。使用TBC快速分类出钢结构与建筑点云,再将其他噪点删除[9]。
(3) 抽稀导出。使用TBC对分离好的建筑点云进行空间取样,并一键导出为RCS格式,导入Autodesk Revit进行BIM模型逆向生成。

图4 现场照片与点云数据
1.3 BIM模型设计
BIM模型设计软件、建模软件多种多样,但是主流格式之间均可相互转换[10],本次采用目前应用较为广泛的Autodesk Revit进行前期模型设计,并将输出FBX格式的模型用于检测分析。
1.4 BIM模型其他应用价值
1.4.1生成二维图纸
生成二维图纸如图5所示。

图5 三维模型制作二维图纸
1.4.2BIM模型放样
将BIM模型导入Trimble放样机器人(可以带贴图材质)或SX10中(线框模型)进行现场放样指导。
2 点云与模型对比检测
幕墙预装检测在Trimble RealWorks软件中进行。首先将预处理过的点云和设计好的模型在RealWorks软件中打开,根据施工建筑轴线图将模型与点云的位置统一,然后在RealWorks软件检测模块打开三维检测功能,应用此功能得到三维检测结果,成果以多色彩色谱图表示检测结果,最后设置偏差限差色谱,利用RealWorks软件三维检测分析器对结果进行分析,可得知施工现场建筑物与设计模型任意三维点的偏差值是否超限,若在可控范围内则接受,进而指导建筑物外侧玻璃幕墙的安装工程。若超出安装范围,则需进行逆向建模更改设计模型和幕墙设计,从而避免材料、时间、人工成本的浪费,保证工程的顺利进行。如图6所示。

图6 对比检测与分析图
3 结 语
在异形结构大范围玻璃幕墙安装工程成本施工控制方面,Trimble SX10影像扫描仪以其高精度、高密度的特点,以及测量操作流程,发挥了很大的优势。Trimble SX10影像扫描仪的应用缩减了工期,减少了建筑原材料的浪费,在成本控制方面起到了非常大的作用。
参考文献:
[1] 刘冠榕,李盘龙. 建筑玻璃幕墙设计与施工质量控制研究[J].门窗,2017,12(12):10-12.
[2] 王利宽,王业治. 单元式建筑幕墙关键设计处理与施工技术分析[J].门窗,2017,12(11):17-23.
[3] 臧伟,钱林,孙宝军,等.地面三维激光扫描技术在工程测量中的应用[J].北京测绘,2015,5(3):130-135.
[4] 吴玉泉,杨倩.基于三维激光扫描技术的点云拼接和建模[J].现代经济信息,2017,7(13):353.
[5] 桂仁,王永明,檀丁.基于三维激光扫描技术的建筑物立面测量方法[J].北京测绘,2017 (S1):110-113.
[6] 林美娜,冯云龙,朱大明.三维激光扫描技术在建筑物重建中的应用探讨[J].价值工程,2017,9(25):162-164.
[7] 葛云峰,夏丁,唐辉明,等.基于三维激光扫描技术的岩体结构面智能识别与信息提取[J].岩石力学与工程学报,2017,36(12):3050-3060.
[8] 柯维杰,冯成武. 三维激光扫描技术在城市建筑竣工测量中的应用研究[J].工程技术,2017(33):62-63.
[9] 祁春辉. 浅谈三维激光扫描技术与BIM技术在工程测量中的应用[J].中小企业管理与科技,2017(35):176-177.
[10]唐雯. 基于三维激光扫描技术的数据处理及模型重建[J].山西建筑,2018,44(1):209-210.
