基于图像识别的基坑自动化监测异常数据筛选方法
2018-04-04阮国荣
阮国荣
上海建工集团工程研究总院 上海 201114
1 基坑监测现状
基坑监测分为基坑本体以及周边环境监测2个部分,主要监测内容包含了支护结构、周边沉降、土体和建筑物水平位移等。
目前常用的全站仪、水准仪等自动化监测设备,可以自动采集数据,然后采用蓝牙、GPRS等网络通信方式,上传至线上存储单元。
工程数据监测,需要在国标及地方标准的基础之上,结合工程所在地的地质条件、水文信息以及周边环境,推算出适用的监测报警限值。而监测数据很容易受到外界因素的干扰,比如测量导管人为触碰、监测区域附近大型施工车辆经过等,都会引起测值突变。这就使得目前的工地施工监测,依然需要大量技术人员进行人工分析,去除一些不会影响工程安全的超标数据。
要让自动监测系统在基坑工程的日常安全管控中发挥更大的作用,让自动预警的有效性得到专业人员的认可,必须寻找一种可靠的数据筛选办法,降低外部因素对自动监测结果的影响。
2 数据筛选原理
本数据筛选方法的原理,是寻找数据突变与现场人为因素之间的关联,当出现数据突变时,自动根据突变发生时间点前后的图像变化,来判断该突变是否由外部人为因素造成[1-2]。
考虑到施工现场的实际情况,根据工程安全的管理经验,将需要筛选的数据对象限定为速率变化超过警戒限制的那部分图片数据。针对这部分数据,根据数据监测时间的视频图像分析,判别是否有人员、车辆或其他施工设备进入监测设备的受干扰区域。如果判定结果监测数据突变与周边环境变化有关,则将这部分数据自动筛选出来,作为后续人工判别或智能判别的基础。其实现逻辑如下:
1)根据不同监测项目,设定监测值变化速率的警戒范围,该报警值可能随着施工推进发生变化。
2)当自动监测数据变化速率超出警戒范围时,触发图像识别系统。
3)图像识别系统根据监测数据报警的时间点,寻找该时间点附近的视频图像是否存在变化。
4)当图像存在变化,将该数据标识为待筛选数据。
5)定时比对待筛选数据和最新数据,如果产生数值回落,则可将回落后的监测数据作为准确数值进行后续统计分析,把中间一段波峰数据视为外部人为影响造成的突变数据(图1)。
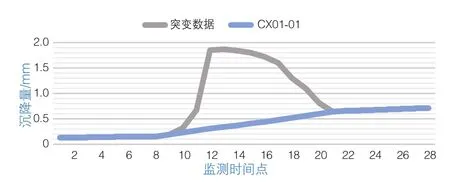
图1 受人为干扰后自动监测数据变化
3 图像识别系统
众所周知,视频监控的搭建成本与分辨率、码流成正比。目前市场上已经有了很多具备人像识别功能、车辆识别功能的视频监控系统,但这种基于物理轮廓和行为跟踪的智能检测分析,需要前端具备高分辨率、码流的视频硬件和网络带宽支撑。这样的系统,虽然可以达到快速判别人员、车辆是否进入监测设备的干扰区域的要求,但其使用成本决定了其在数量较大的监测点监视工作中,无法被大规模推广应用。
图像识别系统要做到与数据监测在实际工程中结合使用,有2个核心指标必须达成:低成本的视频采集硬件和高效率的图像识别软件。我们针对此需求设计了专门的图像识别系统,该系统具备以下特点:
1)持续运行的网络摄像头,由于采用灰度对比的方式来进行识别,因此摄像头可选择比较便宜的型号,对清晰度没有要求,也不需要控制云台等配件,光感度良好即可。
2)当数据突变发生时,本系统是针对突变时间点以前的一段7 s的视频进行分析,该时间段为考虑到施工现场的人员和车辆的运行速度得出的经验值。
3)一个视频源可以同时对多个监测设备进行观测,分析其干扰因素。
4)多个视频源可以形成网络重叠,用分布式计算的方式同时判别,相互校验判别结果。
4 图像识别算法
在图像处理中,图像的频率代表了图像中各个区域灰度变化的剧烈程度,是灰度在平面空间上的变化梯度。如果把图片看成一个二维信号,一个维度是单元坐标,一个维度是单元灰度,可以发现灰度变化剧烈的区域,一般称之为图像的高频成分,正是对象的边缘区域,它描述的是对象的具体细节;而图像的低频区域则描述图像的整体框架。显然,灰度转化是将高维图像数据进行简化的最有效方式之一。
首先,我们要把需要分析的视频段落,进行画面截取,按1帧/s,获得8张图片。
然后,把这些图片通过缩小尺寸来去除高频信息。因为最终分析结果取决于单位区域灰度变化的分析,因此图像的尺寸、纵横比并不影响分析的结果。我们将图片压缩至8×8像素或者12×12像素的标准尺寸(单个项目中,一旦选定压缩比,就不再变化;压缩比与摄像头安装位置、拍摄范围有关),不保留纵横比,摒弃图片尺寸差异。
接着,将压缩后的图片转换,获得一组64像素或144像素的灰度图像(图2)。
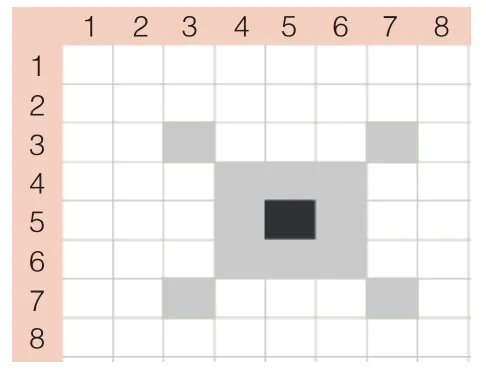
图2 8×8像素图像布局
假设5-5为监测设备所在区域,5-5和与其相邻的8个像素构成设备的受干扰区域,这个区域的4个对角元素3-3、3-7、7-3、7-7为参照系。
计算8张图片中受干扰区域灰度变化率,灰度值变化率=[第(n+1)秒灰度值-第n秒灰度值]/第n秒灰度值。
当干扰区域的灰度值变化率高于4个参照系中灰度值变化率最小的一个时,即判定干扰区域内存在干扰因素,并设定为条件A。
在施工现场,会选定不同的光照强度,对人员或设备进入干扰区域后,灰度值变化率进行预测,选择3~10组数据进行分析,得出一个灰度值变化率的上下限区域,并将灰度值变化率处于该区段内设定为条件B。
当条件A、B同时成立,即判定为人员、车辆或其他设备进入干扰区域。
5 数据筛选算法
经过监测数据的自动预报警和图像识别系统的判定,即可得到一个速率变化超标时间,并知道这个点是否受到人员和车辆等外部因素干扰。
假设监测数据的变化速率在后续的线性变化中,出现负值,则在下次速率归0前必然会出现一个低于监测数据峰值的回落下探。线性分析时,系统可自动筛选掉这部分数据,把这部分数据视为外部因素造成的突变数据(图3)。
从图3可见,自动数据监测的数值判定算法是整个数据筛选算法的起始,当发生数值超标时,触发分支算法——视频图像识别,这个分支根据图像比对来判断是否存在人为因素干扰,并将判定结果传递到主算法。当人为干扰判定成立时,记录起始时间点,在后续测值速率出现负值时,自动捕捉测值波谷作为结束时间点,将该时间段与预设的阈值进行比对(一般设为5 min,可根据施工现场管理需要调整),如果时间段长度小于阈值设定,则判定该时间段内的全部数据为可筛选数据,并进行标记。
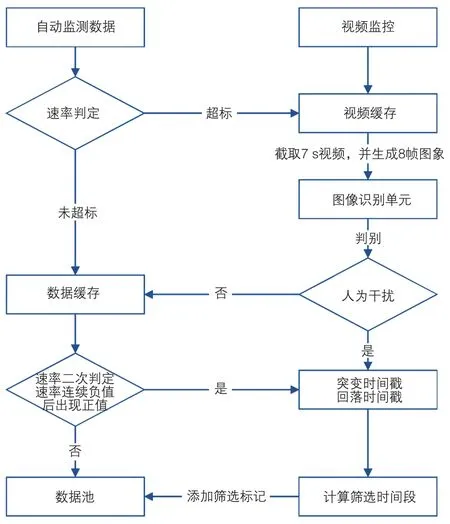
图3 数据筛选整体逻辑
用户在后续数据分析功能,例如报警短信提示、数据汇总、数据曲线绘制等功能中,根据需要自行决定是否屏蔽这部分监测数据。
6 结语
本文提出了一种基于图像识别的基坑自动监测数据筛选方法。针对基坑自动监测数据容易受到外部人为因素影响的问题,给出了一个切实可行的解决方案。该筛选方法,充分考虑了施工现场的实际环境,在低成本实施的条件下,对突变超标数据进行了有效甄别。随着系统的运行以及积累数据量的丰富,系统中一些预设阈值会愈发合理,输出的数据筛选的结果也会更加的准确。将来还可以通过机器学习算法的引入,通过工程类型、施工方法、施工参数等元素,自动推算更佳的筛选条件。也可以根据筛选结果,用大数据手段反向指导现场文明施工,协助施工安全管理。