一种起竖过程中捷联惯导快速对准方法
2018-04-04刘百奇尹世明
刘百奇,吕 艳,尹世明,杨 阳
(中国运载火箭技术研究院研究发展中心, 北京 100076)
惯导系统在正常进入导航之前必须进行初始对准,对准精度和对准时间是衡量整个系统工作性能的重要指标。当武器系统或运载系统需要应急发射时,如何提升初始对准精度和速度尤为重要[1]。
目前,捷联惯导系统初始对准的方式主要有光学对准、传递对准和自对准。传统光学对准方法虽然简单、易实现,但是对配套设备要求高,时间长、自动化程度低[2]。Fang[3]提出了利用水平失准角收敛快的特点,利用水平失准角的稳态值直接估计方位失准角,但该方法并不适用于应急发射。Lü[4]提出了运用IIR滤波器和Kalman滤波器相结合,减弱噪声和外部干扰,提高方位角的对准精度,但不能提高对准的快速性。Wu[5]提出了一种基于GPS辅助信息的捷联惯导对准算法,但其姿态估计的精度与载车的机动模式有关。传递对准的方法也用于多种武器系统,采用高精度的主惯导通过传递对准将信息传递给子惯导[6-7],但该方法对载体机动形式有一定要求。自对准不需要借助外界信息,通过惯导系统自身的输出完成对准,但其方位角的对准时间长,难以满足快速要求。
本文提出一种在武器或运载器起竖过程中进行捷联惯导快速对准的方法,利用起竖过程形成的俯仰机动以及杆臂效应带来的加速度变化,提高了方位失准角的可观测度,并且运用动杆臂补偿法自主获取捷联惯导的位置和速度量测信息,利用卡尔曼滤波实现快速对准,与传统的起竖之后进行静基座精对准方法[8]相比,有效提升了应急发射时对准的快速性和精度。
1 起竖过程快速对准建模
1.1 捷联惯导系统误差建模
捷联惯导系统的误差源有很多种,其中主要有惯性器件本身误差、惯性器件量化误差、系统初始条件误差、系统计算误差等。
1.1.1速度误差方程
根据惯导系统比力方程推导出的速度误差微分方程为:
(1)

(2)
1.1.2位置误差方程
设载体所在的地理纬度为L,经度为λ,高度为h,RM、RN分别为地球的子午圈主曲率半径和卯酉圈主曲率半径。VE,VN,VU为载体东向、北向、天向的速度。惯导系统的位置误差方程可表示为:
(3)
对位置误差方程的经度、纬度和高度求偏导,可得位置误差微分方程为:
(4)
1.1.3姿态误差方程
经推导,姿态失准角微分方程为:
(5)

(6)
1.1.4惯性器件误差方程
将通过标定补偿的惯导系统惯性器件误差中的常值可由以下微分方程描述:
(7)
式(7)中,εx、εy、εz和▽x、▽y、▽z分别为惯导系统载体坐标系三个坐标轴上陀螺的常值漂移和加速度计的常值偏置。
1.2 基于动杆臂的量测信息误差补偿
惯导系统与武器或运载器固连,与发射车伺服机构回转中心有一定的位置偏移即为杆臂矢量。定义杆臂为载体系下伺服机构回转中心指向惯导系统中心的位置矢量,以Rb表示。杆臂示意图见图1。
因为惯导系统所获得的运动参数为惯导系统敏感中心的运动参数,在起竖机动过程中,需要进行伺服机构回转中心到惯导系统之间的动态刚性杆臂补偿,从而得到惯导系统敏感中心的位置、速度量测信息。
1.2.1速度量测信息误差补偿
通过惯导系统陀螺仪实时输出的数据以及杆臂补偿,可以获得惯导系统的实时速度量测信息。即
(10)
1.2.2位置量测信息误差补偿
根据惯导系统实时输出的姿态信息求取载体坐标系至导航坐标系的姿态转移矩阵,将载体坐标系下的杆臂矢量信息转化至导航坐标系下,并且与发射车伺服机构的回转中心的地理位置矢量作矢量和,从而获得惯导系统的实时位置量测信息。即
(8)
(9)
2 Kalman滤波算法
捷联惯导起竖机动过程中,采用基于自主量测信息的卡尔曼滤波估计方法,由惯性导航系统误差方程和惯性器件误差方程得到滤波状态方程,捷联解算结果与自主式量测量的位置、速度之差得到量测方程。
2.1 状态方程
系统状态方程为:
(11)

(12)
式(12)中F1,F2,F3,F4,F5,F6,F7,F8的表达式参见文献[9];
(13)
2.2 量测方程
系统量测方程为:
Z=HX+V
(14)
(15)

3 起竖过程快速对准仿真及试验研究
3.1 仿真及结果分析
为了验证本文提出的起竖过程快速对准方法的可行性和有效性,对传统的静基座精对准的方法和本文方法分别进行了相关对准过程的仿真以及对比。
回转中心所在位置初始纬度设为40°,经度为116°。杆臂长度设为10 m,初始失准角φE、φN、φU分别取为0.05°,0.05°和1°,陀螺仪、加速度计的数据频率为100 Hz。陀螺仪常值漂移取为0.01°/h,随机漂移取为0.01°/h。加速度计的初始偏差取50 μg,随机偏差为50 μg。滤波的初始条件中,状态变量X的初值X(0)均取为0,初始估计均方误差阵P(0),系统噪声强度阵Q和量测噪声强度阵R对应的取得的值如表1所示。
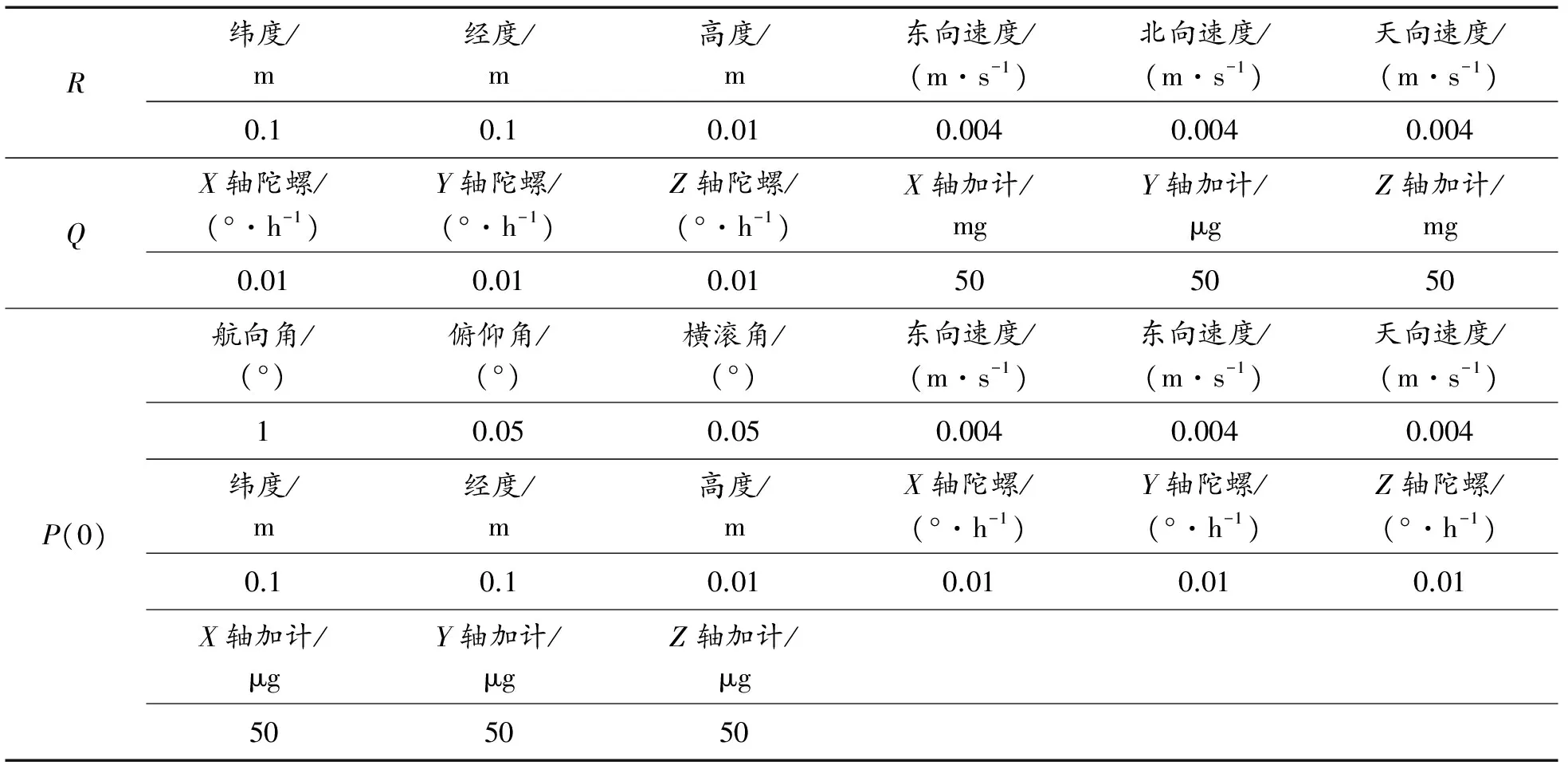
表1 组合滤波参数
利用轨迹发生器生成仿真数据,采用卡尔曼滤波分别对传统的起竖完成后静基座精对准和起竖过程快速对准进行仿真分析。两种不同对准方法的姿态角误差估计过程如图2所示。
由图2可得,传统静基座精对准方法,即在起竖过程完成后进行静基座精对准,水平姿态角俯仰角和横滚角的估计速度快,20 s就基本达到稳定,航向角的估计慢,大约在200 s以上。航向误差角的最终收敛精度为5.8'。图2中起竖过程快速对准方法,在机动起竖过程开始时就进行对准,俯仰角和横滚角的估计速度与传统静基座精对准方法相当,在20 s左右基本达到稳定,但航向角的估计速度比较传统静基座精对准方法快,大约在100 s达到稳定。航向误差角的最终收敛精度为3'。
由仿真结果可得,起竖过程快速对准方法与传统静基座精对准方法相比,不仅提高了对准速度,而且在较短时间约束下,对准精度也有所提高。
3.2 试验及结果分析
为验证本文提出的起竖过程快速对准方法,基于地面起竖装置的起竖对准试验进行研究,验证捷联惯导系统起竖过程的对准精度和对准时间,检验是否满足实际工程需求。
将高精度激光陀螺惯导系统精确安装在光学跟踪系统工装上,确定惯导系统敏感中心与工装测量基准间的位置关系,将工装精确安装在模拟弹体适当位置,连同工装一起装配到试验起竖装置结构上。装配光学动态跟踪系统,设置好光学动态跟踪仪,实现实时动态跟踪惯导系统,精确测量惯导系统的位置、姿态等运动信息,用于后续检校起竖对准精度。起竖装置开始起竖工作后,在装置起竖过程中采用惯导系统自主测量的角度和角速度信息进行实时动杆臂补偿,获得自主量测信息,并进行快速对准。
伺服机构回转中心在试验前通过经纬仪精确测量所在位置,同时精确测得杆臂长为9.194 3 m。起竖过程从初始姿态开始,旋转90°后到达结束姿态。
试验一共进行了15组,对15组起竖实验数据统计分析结果如图3所示。
通过地面起竖装置的起竖环境快速对准试验结果可以得出:航向姿态角对准精度在90s达到6'以内,在105s左右达到4'对准精度,满足实际工程中起竖对准的精度和快速性需求。
4 结论
本文针对武器或运载器应急发射对快速对准的需求,提出了一种起竖过程中捷联惯导快速对准方法。在静基座条件下,利用起竖机动过程及动杆臂补偿方法获得自主式量测量,并运用Kalman滤波实现精对准。仿真结果表明,该方法与传统静基座精对准相比,提高了对准速度和精度。地面试验验证了该方法的有效性。理论分析和试验结果表明,该方法能够满足应急发射快速对准的需求,具有重要的工程应用价值。
参考文献:
[1]梁浩,王丹丹,穆荣军等.车载导弹光学辅助数学传递对准方法[J].兵工学报,2015,36(3):510-515.
[2]王丹丹,陈小军,王丽华.新对准技术应用展望[J].导弹与航天运载技术,2009 (3):20-22.
[3]FANG J C,WAN D J.A fast initial alignment method for strapdown inertial navigation system on stationary base[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1501-1504.
[4]LV S L,XIE L,Chen J B.New techniques for initial alignment of strapdown inertial navigation system[J].Journal of the Franklin Institute,2009( 346):1021-1037.
[5]吴枫,秦永元,成研.基于 GPS 的弹载捷联惯导动基座传递对准技术[J].中国惯性技术学报,2013 (1):56-60.
[6]LUAN H Z,MAO Y L.Study on a method of rapid transfer alignment[C]//Mechatronic Science,Electric Engineering and Computer (MEC),2011 International Conference on.IEEE,2011:1423-1426.
[7]马志强,林恒,魏莹莹.车载传递对准技术研究[J].传感器与微系统,2011,30(3):54-56.
[8]Yang G L,WANG Y Y,YANG S J.Assessment approach for calculating transfer alignment accuracy of SINS on moving base[J].Measurement,2014,52(6):55-63.
[9]HU J,CHENG X H.A new in-motion initial alignment for land-vehicle SINS/OD integrated system[C]//2014 IEEE/ION Position,Location and Navigation Symposium-PLANS 2014.IEEE,2014:407-412.
