基于ZigBee的无人船的应用与研究
2018-04-03桂林电子科技大学电子工程与自动化学院信息科技学院电子工程系
桂林电子科技大学电子工程与自动化学院 信息科技学院电子工程系 黄 东
桂林电子科技大学信息科技学院电子工程系 陈乐庚
0 引言
经过多年的改革开放,我国的水产养殖大幅增长,已是世界水产品养殖大国。但在水产养殖监测高科技投入还是有很大的不足,特别是在水质检测方面,还停留在传统的人工取样方式,传统人工方式实时性差,耗时费力,成本也高。本文设计了一款小型无人驾驶双体船,依托船体装载GPS定位、检测传感器与控制投放设备,结合无线传输技术,用户可以在远程操控船体,到达指定区域投放饲料,采集水样。进而实现近海养殖和大面积水产养殖的远程在线监控。
1 总体设计
无人驾驶船主要分为远程操控系统和船载系统两部分,采用无线通信方式实现远程操控系统和船载系统的数据通信。系统结构图如图1所示。
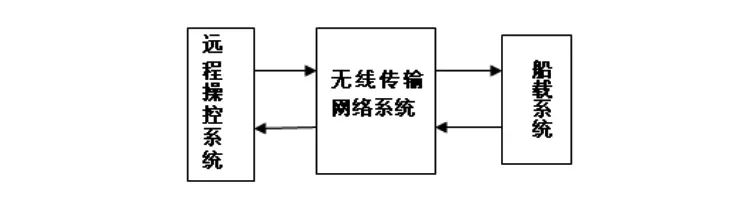
图1 系统结构图
1.1 船载系统和远程操控系统的硬件设计
船载系统主要以STM32F407ZGT6单片机为核心,使用12V锂电池供电,其他元件的供电主要靠XL4016与LM2596-adj芯片降压后得到,使PWM与控制信号输出靠单片机产生,信号输出到BTN7970大功率驱动器,BTN7970大功率驱动器用于驱动无人船上的动力电机,GPS模块用的是NEO-6M-UBLOX,这款高性能的GPS模块用于接收地理位置信息。采集信号方面,选用DS18B20温度传感器来检测水温,机械式风速计检测风速。无人船还可以自动投放饲料或设备,为此专门设计了一个步进电机与丝杆组合结构。
远程操控系统主要以IAP15F2K61S2单片机作为核心。远程操控系统显示界面采用串口HMI显示屏,通过ZigBee无线传输方式传输,在远程终端显示屏可以显示船载系统传感器采集的数据,以及GPS接收地理位置数据,便于很好控制无人船的航行。在用户管理方面,通过RFID射频识别无线通讯技术对用户进行分级授权,使不同用户获得相应操作权限。船载系统和远程操控系统采用ZigBee无线传输方式实现远距离数据传输。船载系统和远程操控系统的硬件设计原理框图如图2所示。

图2 船载系统和远程操控系统的硬件设计原理框图
1.2 电源电路
电源电路设计采用LM2596芯片,LM2596是降压型电源管理单片集成电路的开关电压调节器,能够输出3A的驱动电流,同时具有很好的线性和负载调节特性。并具有完善的保护电路、电流限制、热关断电路等。利用该器件只需极少的外围器件便可构成高效稳压电路。本设计电源电路输出5V电压给单片机提供电源,电源电路设计电路如图3所示。
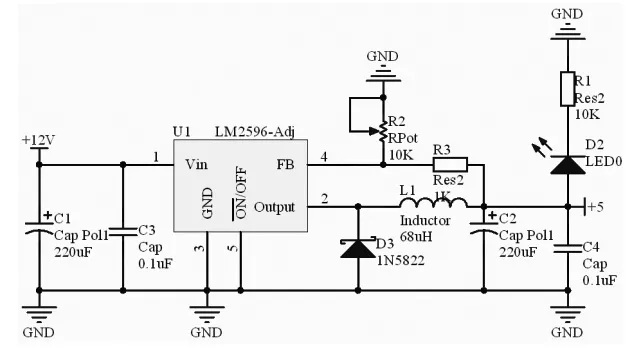
图3 电源电路设计电路
1.3 电机驱动电路
电机驱动电路的设计采用L298N芯片控制电机,电机正反转、快慢速调节由单片机的控制信号来控制,电机驱动电路原理图见图4所示。
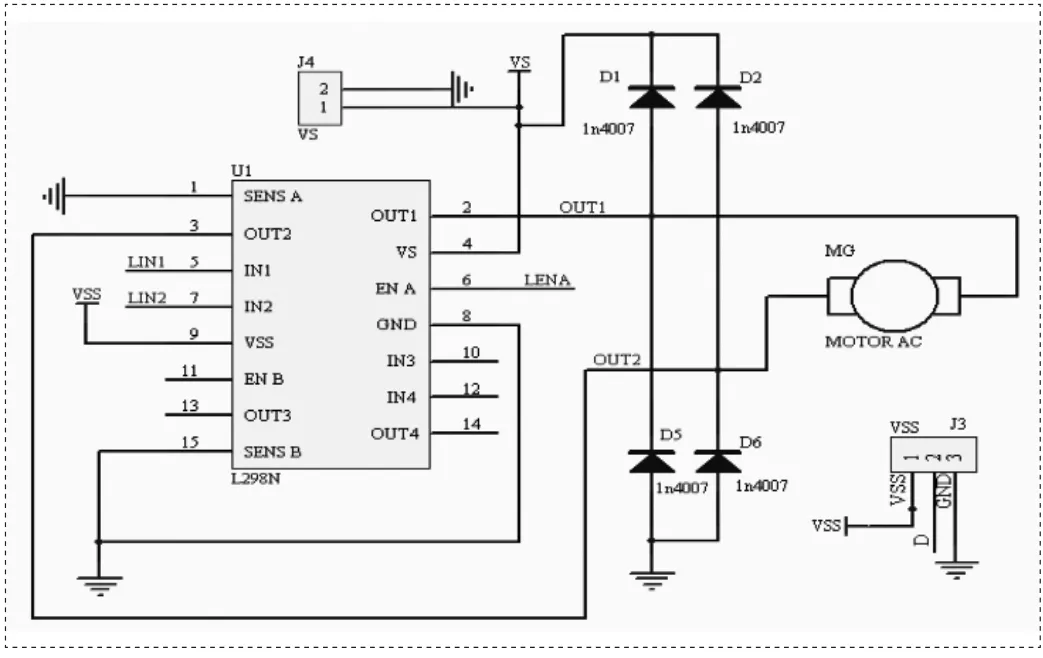
图4 电机驱动电路
1.4 ZigBee通讯模块
ZigBee是一种低功耗、低速率、低成本、低复杂度的无线通信技术,此技术可以有不同的工作频段,而且传输速率较低,传输数据量小。而在非工作模式下,ZigBee 节点即会处于休眠状态,这样功耗也很低,完全适合控制信号传输。无疑设计上采用 ZigBee作为系统无线通信的方式,使系统的控制信号接收更迅速,抗干扰能力更强。设计选用的CC2530+CC2591(PA功率放大)方案的传输距离可以达到1000m以上,为了使得节点能够在开阔水域传输更远距离的信号,引入了二级放大,二级放大使用SKY65135芯片。原理图见图5所示。

图5 CC2530+CC2591方案原理图
2 软件设计
2.1 无线通讯网的建立
如图6是无线通讯网建立的总体流程图,图中描述了远程操控系统是如何与无人驾驶船进行信息的无线交互传输的。
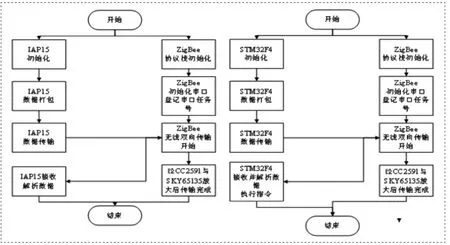
图6 控制终端与船体数据传输流程
2.2 电机调速信号产生
电机调速信号是通过脉冲宽度调制来实现的,如图7所示是PWM程序流程图。
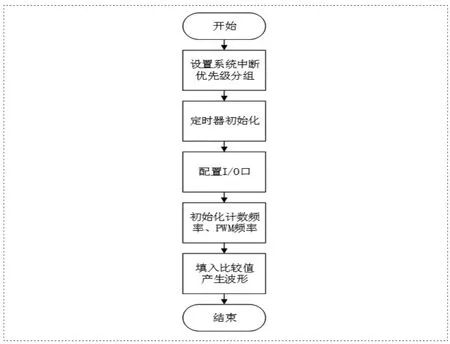
图7 PWM程序流程图
2.3 GPS信号数据解析
STM32F407ZGT6单片机需要先初始化I/O口后,通过串口开始接收GPS的NMEA-0183协议回传的$GPRMC推荐定位信息,然后解析该定位信息,最终将信息整合并进行无线传输。GPS地理位置数据传输流程如图8所示。
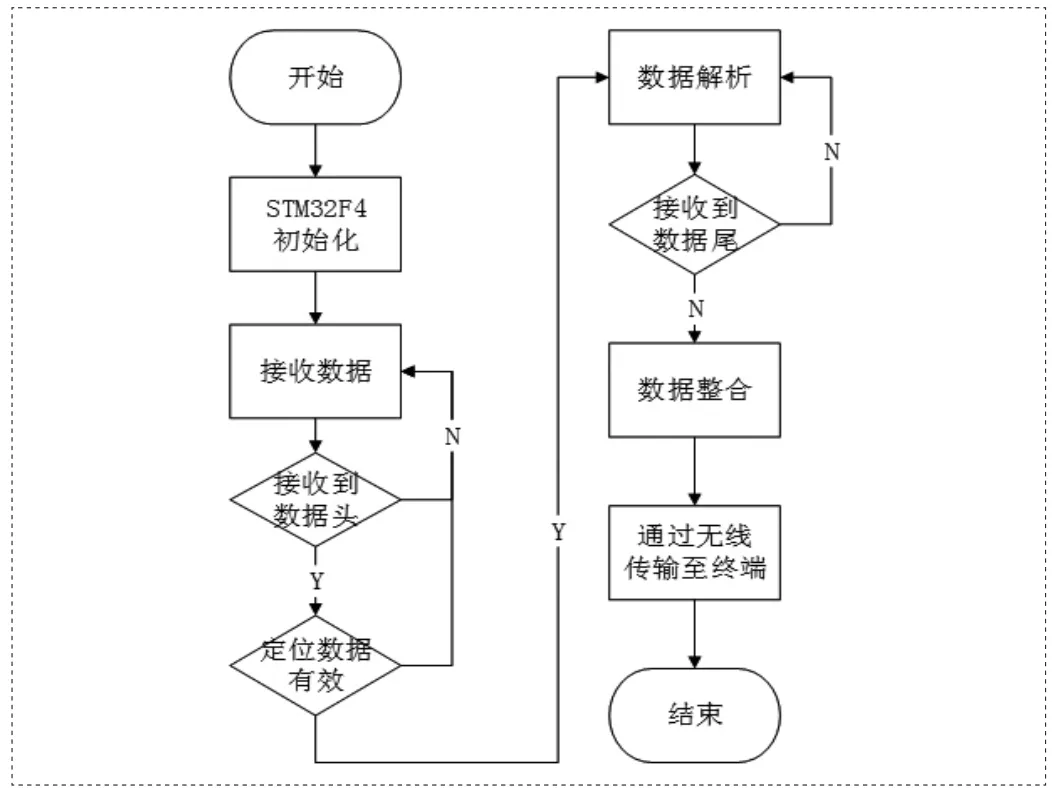
图8 GPS数据传输流程图
3 下水测试
在湖面进行测试,将双体小船放入水中,利用摇杆电位器控制小船前进,后退和转方向运动,直线驶入指定区域后,进行风力监测、水温等检测,测量参数传输到远程操控系统,远程操控系统也观察到GPS地理位置数据。小船继续行驶,达到另一个指定区域后,进行模拟投放饲料,顺利完成,全部达到设计目标。
4 结束语
这次无人小船体设计制作主要参照双体船的设计办法实现,双体船在行驶的时候阻力小,速度快,其中稳定性是双体船最大的优点。双体船下水测试后,动力充足转向灵活,能够稳定运行于水面,整体性能优良,整体性能达到设计之初的规划。当然无人船系统具有相当大的改进空间,今后还要进一步完善本系统,使之成为功能更好、更稳定的产品。
[1]张齐 杜群贵编著.单片机应用系统设计技术[M].电子工业出版社,2004.
[2]鲍宏亚.MCS-51系列单片机应用系统设计及实用技术[M].中国宇航出版社,2005:34-42 .
[3]松井邦彦.传感器应用技巧141例[M].北京:科学出版社,2006:24-27.
[4]荚庆,王代华,张志杰.基于nRF905的无线数据传输系统[J].国外电子元器件,2008(1):29.
[5]龚道礼.基于无线传感器网络的环境监测系统研制[D].中国地质大学,2011:8.
[6]王小强,欧阳骏,黄宁淋.ZigBee无线传感器网络设计与实现[M].化学工业出版社,2012.
[7]李家良.水面无人艇发展与应用[J].火力与指挥控制,2012(06):203-207.
[8]刘军,张洋.原子教你玩STM32[M].北京:北京航空航天大学出版社,2013:1-961.
[9]薛承基,张永昌,李正熙,等.电机传动系统控制[M].北京:机械工业出版社,2013:1-310.
[10]黄杰勇,林超文.Altium Designer实战攻略与高速PCB设计[M].北京:电子工业出版社,2015:1-307.