在线测量刀具图像调焦特性的镜头对比研究*
2018-04-03杜文华曾志强王俊元段能全王日俊
杨 芳,杜文华,曾志强,王俊元,段能全,王日俊
(中北大学 机械与动力工程学院,太原 030051)
0 引言
随着机器视觉和视觉机器测量要求的不断提高,测量系统调焦环境的好坏对整体系统测量精度的影响至关重要。调焦模块的对焦问题离不开镜头的选择,远心镜头和普通镜头二者的工作景深、透视变形、调焦精度和价格成本等无法平衡。
目前国内外实验室研究和制造企业生产的视觉测量系统设计研究中,不少学者从不同角度提出不同的调焦评价函数来对图像的清晰程度进行评价,现提出的评价函数有几十种,主要从灵敏度、单调范围、无偏性、信噪比和局部极值因子等指标对聚焦函数的性能进行评定,其调焦模块考虑具有较大的工作景深和消除透视变形以及由于透视变形产生的被测物遮挡的情况,采用远心镜头,但是随之会造成较大的成本提高,对于大批量产品来说会造成较大的成本提升。
本文从保证调焦函数的特性出发,对所获图像的调焦函数曲线特性进行评价,拟通过多项性能的比较,在同一测量精度和调焦要求下,发现非远心镜头代替远心镜头的可能性。研究中所涉及的在线测量相关问题,将扩展现有视觉测量技术的研究范围和深度,对不同测量任务所需调焦模块的设计研究具有重要的理论意义。此外,相关研究成果对于满足同一精度动态测量工况的镜头选择具有重要工程应用价值。
1 图像调焦函数理论分析
一个理想调焦曲线,在正焦位置的图像有着很尖锐的边缘,而在图像处理中,常用梯度函数来提取图像的边缘信息,因此可以选择梯度函数来作为图像清晰度评价函数。图像的清晰程度与其梯度值成正相关,边缘越锋利,梯度值越大,则图像越清晰。
在自主开发的在线刀具测量系统中,被测对象主要是铣刀,一般来说图像的灰度变化比较均匀,刀具边缘图像部分存在一定的过渡区,即该刀具的图像在边缘边界位置灰度值变化不是很剧烈,本文选用聚焦函数值变化明显的Tenengrad函数作为视觉测量系统调焦模块的调焦评价函数。
Tenengrad 函数是先通过使用Sobel 算子对图像进行边缘检测,然后计算图像的梯度值,它包括水平和垂直两个方向的梯度值,分别用水平模板和垂直模板来提取。然后可利用 Tenengrad 函数来计算图像清晰度,该函数的计算式[7]如式 (1)、(2)、(3)所示:
Sx=f(x+1,y-1)+f(x+1,y-1)+2f(x+1,y)-
f(x-1,y-1)+f(x+1,y-1)
(1)
Sy=f(x-1,y+1)+f(x+1,y+17)+2f(x,y+1)-
f(x-1,y-1)+f(x-1,y-1)
(2)
(3)
在式(1)~式(3)中,Sx和Sy分别是水平、垂直方向的梯度值,f(x,y)是图像中某一像素点(x,y)的灰度值,E是评价函数。
图像清晰度评价函数的特点:由光学原理可知,当成像目标处在焦平面时所成的像是最清晰的,在其它位置都不清晰,并且离焦平面越远,图像越不清晰,因此可以用图像的清晰程度来表明测量系统所成像目标的离焦、正焦程度。图像清晰度评价函数曲线特性主要通过下面五个评价指标进行定量评估[8-10]。
(1)清晰度比率大小表征调焦评价函数离焦时的分辨率强弱,其值用R表示。
(4)
式中,分子表示调焦评价函数的极大值,分母表示其极小值。
(2)灵敏度强弱表征评价函数曲线变化的剧烈程度,其值用SEN表示。
(5)
式中,f(zmax+ε)是评价函数曲线的x轴变化为ε时的函数值,ε是调焦评价函数值发生突变时x轴的改变值。
(3)局部极值因子大小表征曲线平缓区的陡峭程度,大小用LEF表示。
(6)
式中,ff-max、ff-min分别是调焦函数曲线平缓区的极大值、极小值。
(4)陡峭区宽度表征陡峭区间的宽度大小,其大小用Ws表示。
Ws=|zlcp-zrcp|
(7)
式中,zlcp、zrcp分别是镜头的左、右临界点坐标位置。
(5)陡峭度表征离最佳聚焦位置的不同距离离焦图像的分辨率,其大小用S表示。
(8)
(9)
(10)
式(8)中:SL、SR分别是左、右陡峭度,式(9)、式(10)中:flcp、frcp分别是左、右临界点的函数值。
2 实验系统搭建
本文采用自行研发的高精度视觉测量系统实验平台来采集图像数据。实验平台如图1所示,其主要性能参数如下:图像采集系统采用CgImageTech相机,相机传感器尺寸2/3 inch,分辨率1392×1040 pixel;光路系统采用镜头a(Computar非远心镜头),镜头b(艾菲特 BT-2316远心镜头),采用平行背光源照明。测试条件如下,CPU:Intel Core(TM)i3-2330M@2.20GHz,内存:4GB;软件采用C++编程实现。

图1 实验平台
3 实验结果与分析
分别用Computar镜头a和艾菲特 BT-2316镜头b为光学系统,每种镜头采集的图像存为一组,每组采集10次,每次以深度离焦—轻度离焦—聚焦—轻度离焦—深度离焦为一个周期,这样获取了两组图像数据。图2给出了铣刀在一个调焦周期中的三种调焦状态的图像,分别为深度离焦图像、轻度离焦图像和聚焦图像。

(a) 深度离焦 (b) 轻度离焦 (c) 聚焦 图2 三种聚焦状态的铣刀图像
用梯度平方函数对图像内所选择的区域进行计算,将所得的数据存入文件,用软件对生成的数据文件进行分析和绘图,同时记录多次调焦过程中的Tenengrad梯度函数值的变化,测试调焦函数值的抖动情况。因不同镜头对同一目标成像的最佳聚焦位置不同,为了便于对比研究,将两条曲线的最佳对焦位置横坐标对齐,得到归一化的Tenengrad函数曲线,如图3所示。

图3 两类镜头环境下Tenengrad函数曲线归一化
将Tenengrad函数曲线进行特性曲线性能分析,分别计算两类镜头下的清晰度比率、灵敏度、局部极值因子、陡峭区宽度和陡峭度,计算结果如表2所示,对于调焦函数曲线,评价指标R值越大,分辨率越强;SEN值越大,灵敏度越高;LEF值越小,鲁棒性越好;Ws越小,曲线性越好;S值越大,分辨力越强。
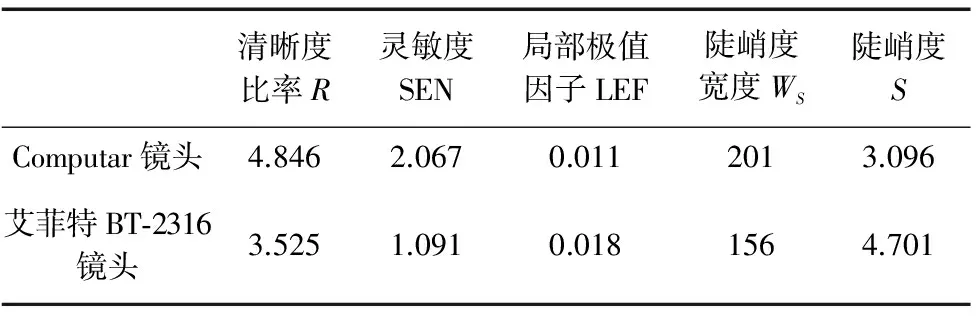
表2 两类镜头下Tenengrad 函数曲线性能对比
由表2中的数据可知,Computar镜头对应的R值、SEN值和LEF值三方面是相互统一的,非远心镜头在清晰度比率、灵敏度和局部极值因子三个指标下均明显高于远心镜头,清晰度比率高出27%,灵敏度高出47%,局部极值因子高出38%,可以看出非远心镜头在分辨率、灵敏度和鲁棒性特性上占优势;而艾菲特BT-2316镜头在陡峭区宽度和陡峭度指标下占劣势,Ws低于远心镜头22%,S值低于远心镜头34%,可以看出远心镜头在曲线性和不同程度离焦图像的分辨率方面弱于远心镜头。
本实验室研发的在线测量系统应用于复杂工业环境时,存在机床振动或干扰等特点,这不仅要求有良好的分辨率和灵敏度,对干扰的敏感程度的要求更高,即聚焦函数的鲁棒性更具优越性,所以优先选择分辨率、灵敏度和鲁棒性均占优势,同时成本更低的非远心镜头。
4 结论
为解决视觉测量系统中调焦模块的远心镜头导致的系统复杂度和成本的增加问题,本文采用Tenenegrad函数,该调焦函数可用于实验室的视觉测量系统的调焦模块,分析对比了远心镜头和非远心镜头两类镜头环境下的聚焦函数调焦特性,以实验室自主研发的“刀具测量仪”中的调焦模块为实验平台,采用多项评价指标对评价函数进行实验对比研究,发现非远心镜头的分辨率、灵敏度和鲁棒性性能更优,远心镜头的陡峭区宽度和陡峭度即曲线性更好,基于在线测量系统应用于复杂工业环境的特点,应选择分辨率、灵敏度和鲁棒性均占优势,同时成本更低的非远心镜头。同时此对比研究为实践中的调焦系统和视觉测量系统设计提供一定理论指导,为镜头的权衡和调焦实际应用提供参考。
[参考文献]
[1] Zhou C, Lin S, Nayar S K. Coded Aperture Pairs for Depth from Defocus and Defocus Deblurring[J]. International Journal of Computer Vision, 2011, 93(1):53-72.
[2] 潘兵, 俞立平, 吴大方. 使用双远心镜头的高精度二维数字图像相关测量系统[J]. 光学学报, 2013, 33(4):97-107.
[3] 屈玉福, 浦昭邦, 赵慧洁,等. 调焦评价函数灵敏度的影响因素分析[J]. 光学学报, 2005, 25(7):902-906.
[4] 何博侠, 张志胜, 徐孙浩,等. 大尺寸机械零件的机器视觉高精度测量方法[J]. 中国机械工程, 2009,20(1):5-10.
[5] 洪裕珍, 任国强, 孙健. 离焦模糊图像清晰度评价函数的分析与改进[J]. 光学精密工程, 2014, 22(12):3401-3408.
[6] 金雪, 马卫红. 图像调焦过程的清晰度评价函数研究[J]. 光学仪器, 2012, 34(1):59-64.
[7] Chen C Y, Hwang R C, Chen Y J. A passive auto-focus camera control system[J]. Applied Soft Computing, 2010, 10(1):296-303.
[8] Hong Y Z, Ren G Q, Sun J. Analysis and improvement on sharpness evaluation function of defocused image[J]. Guangxue Jingmi Gongcheng/optics & Precision Engineering, 2014, 22(12):3401-3408.
[9] 谢权. 镜头像差对图像画质影响的解析与对策[J]. 西安文理学院学报:自然科学版, 2013, 16(3):125-128.
[10] Alobayde M A, Abrahem S A. The Effect of Geometrical Dimensions on the Image Position of the Thin Gravitational Lens[J]. Annals of Biomedical Engineering, 2010, 29(12):1064-1073.
[11] 王平江, 陈德军, 巫孟良,等. 一种复合的自动对焦方法在影像测量仪中的应用[J]. 中国机械工程, 2007, 18(21):2555-2560.
[12]刘焕牢, 师汉民, 李斌. 数控机床定位误差的高精度测量及补偿技术[J]. 组合机床与自动化加工技术, 2005(1):40-41.
[13] 蒋昀赟. 基于一种新的调焦函数的工作台实时距离自动检测系统[EB/OL]. http://www.paper.edu.cn,2014.
[14] 祁晓玲, 赵霞霞, 靳伍银. 基于机器视觉的轴类零件几何尺寸测量[J]. 组合机床与自动化加工技术, 2013(1):65-67.
(编辑李秀敏)