基于动态路径规划的三维扫描方法设计与应用
2018-04-03张晓蕾梁延德何福本王瑞锋
张晓蕾,梁延德,何福本,王瑞锋
(大连理工大学 机械工程学院,辽宁 大连 116024)
0 引言
目前,在三维扫描领域主要针对被测表面采样点及扫描仪视点规划和路径规划的算法改进等两个方面进行深入研究。在采样点及视点规划方面,Li等[1]提出表面矢量分布链对视角进行规划,并通过已知被测表面数据估计下一视角。Wu等[2]将参数化曲面模型投影到平面,按扫描仪覆盖面积分割确定采样点和视点。Kriegel等[3]通过估计被测表面曲率对视点进行规划,对被测表面进行缺陷检测。在路径规划方法方面,Son等[4]提出区域生长路径规划算法优化扫描时间和扫描次数,通过扫描约束条件更新路径。Zhao等[5]针对相邻两采样点之间的可能路径进行研究,并规划最优扫描路径。卢科青等[6]基于探路法对被测表面进行自适应采样,运用PLP进行探路测量并对接触式测头的自适应采样进行指导。上述方法通常对被测表面进行一次扫描,没有进一步分析扫描获取的三维数据并采取补偿措施。李雄兵等[7]针对超声检测的路径进行二次规划,通过对初次检测的测量点曲面曲率进行分析,实现测量点二次自动规划,但该方法运行步骤较为复杂,算法不易实现。因此,对被测表面进行两步路径规划对提升扫描精度具有实际意义。
本文提出基于动态路径规划的三维扫描方法,将粗扫掠获取的三维表面信息作为二次扫描的依据,自动规划采样点、视点及扫描方向,生成动态扫描路径,并通过实验评估该扫描方法的扫描质量。
1 三维扫描理论
三维扫描约束条件和可视锥概念的引入,将为扫描方法设计定义和规划应用提供重要的理论依据与指导。
1.1 约束条件定义
激光式三维扫描工作主要通过被测表面轮廓识取、采样点选取、视点和扫描方向布置、扫描路径生成等几个步骤实现,其基本扫描理论如图1所示。定义P为被测表面上的被测点,视场FOV是在扫描空间中以测头L为原点、α为视场角的区域,其中向量D是在视场角α的角平分线上的单位向量,向量N是被测点P在被测表面上的法向量。那么由几何关系可知,在三维扫描过程中,可通过计算获取视点、扫描方向及生成扫描路径等需要满足以下约束条件[8]:
(1)视角γ:法向量N与向量LP之间的夹角θ不大于视角γ。
(2)景深DOF:被测点P所在的位置应在扫描仪的景深范围内,由式(1)表示:
hn≤LP≤hf
(1)

图1 三维扫描理论原理
其中,远视深距离hf=hs+lDOF/2,近视深距离hn=hs-lDOF/2,hs为测头的视距高度,lDOF为扫描仪的景深距离。
(3)视场FOV:被测点P在视场FOV范围内,即向量LP与向量D的夹角小于α/2。
(4)激光的发射和反射光路不能被遮挡,测头的运动轨迹不能与被测表面接触。
1.2 可视锥概念
进行扫描时,首先需要判断被测表面上任意被测点是否可视,只有在可视范围内才能够对其进行视点和扫描方向规划。通过引入在工程上通用于曲面加工的碰撞检测的可视锥概念[9],可以基于被测曲面上的某被测点建立可视锥区域,从而判断该被测点的可视范围。
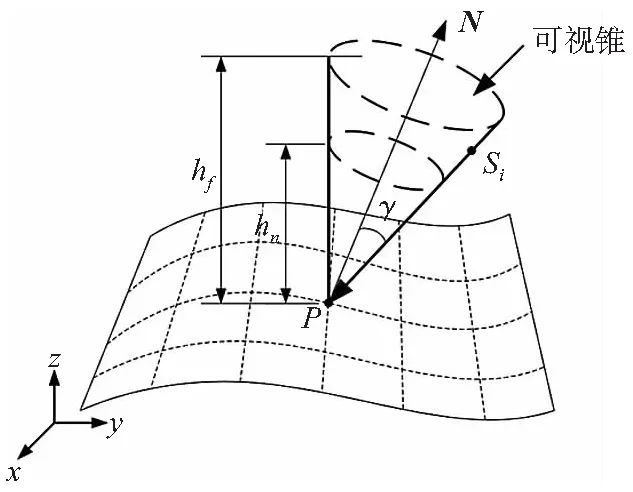
图2 可视锥示意图
如图2所示的三维扫描可视锥示意图,在可视范围内视点位置为Si,SiP为扫描方向向量,根据扫描约束条件,对被测点P的所有扫描方向是局部可视的,对所有可视的扫描方向向量SiP的集合将形成一个以点P为顶点,法向量N为轴线的锥形区域,即被测点P的可视锥,其中向量PSi与法向量N的最大夹角为视角γ。那么,当视点Si位于可视锥域内,且高度h满足hn≤h≤hf,则认为该视点是可视的且位于景深范围内。
2 扫描动态路径规划
对被测表面进行两步扫描,首先通过粗扫掠确定被测物体的形貌和范围,根据获取的点云数据建立曲面并分析三维信息缺失情况;然后,针对信息缺失区域规划采样点、视点及扫描方向,自动规划动态扫描路径,补全缺失的三维信息,使三维扫描完整有效。
2.1 点云缺失区域划定
对粗扫掠生成的点云数据进行读取和处理,由于点云缺失区域被其周边的三角面片所包围,设三角面片形成的曲面为H,各三角面片的顶点坐标为Vi,顶点坐标集合表示为V,可由式(2)表示:
V{Vi=(xi,yi,zi)|i=1,2,…,n}
(2)
为了估计点云缺失区域的法线方向,设曲面H中各三角面片的法向量为Nj,求解法向量Mj的平均向量Nm作为点云缺失区域的主法线方向,由式(3)表示:
(3)
2.2 采样点规划
为了保证点云缺失区域在扫描过程中可视,引用最小包容球理论对曲面H中的点集V进行近似运算[10]。设n维空间Rn内n个点的集合为X={X1,X2,…,Xn},若存在球Br能够包容点集X内的所有点且具有最小半径,则球Br称为点集X的最小包容球[11],最小包容球球心表示为C0,半径为R0。
若最小包容球Br能被多个视场FOV的集合包含,则认为点云缺失区域的所有位置都可以被采集到,即求解包含最小包容球Br所需视场个数的最小值问题。
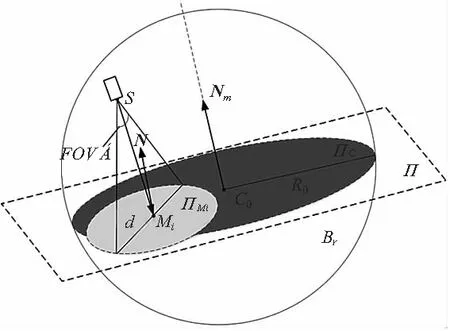
图3 区域覆盖示意图
如图3所示,包容球Br与平面Π的截面为以C0为圆心,以R0为半径的圆ΠC,设位于点云缺失区域的采样点Mi在视场FOV的轴线上,视场FOV与球横截面截交线长度为d,那么视点S对应的所有视场FOV的集合与平面Π的截交线可形成以Mi为圆心、d为直径的视域圆ΠMi。设视域圆ΠMi的最少个数为k,则圆ΠC与视域圆ΠMi的关系由式(4)表示:
(4)
通常解决区域覆盖问题使用圆周等分法、正六边形蜂窝法、蒙特卡罗法[12]等方法。考虑到视域圆ΠMi与圆ΠC的半径相差较小,可运用圆周等分法计算采样点位置,以视域圆ΠMi的直径d作为圆ΠC的弦长等分圆ΠC的圆周,设弦所对应的圆心角为φ,所需要的弦的个数为x,则x与φ的关系由式(5)表示。
(5)
根据圆周等分法可知, 弦的个数取决于d与R0的关系,当x<5时,x个弦所对应的视域圆ΠMi的并集可包含圆ΠC,弦的个数与采样点Mi的个数相等,即k=x,采样点Mi位于等分圆周的各个弦的中点;而当x≥5时,x个弦对应的视域圆ΠMi的并集不能覆盖圆ΠC的圆心,需在圆ΠC的圆心C0单独设定一个采样点补全覆盖区域,此时采样点个数为k=x+1。
2.3 视点位置及扫描方向生成
为了减少扫描路径的长度和机器人沿扫描路径运动过程中调整位姿所用的时间,视点位置设置在过球心C0且平行于法方向Nm的轴线附近,轴线表示为C0T,如图4所示。视点位置Si和扫描方向向量SiMi的选择应满足以下两个条件:
(1)视点Si在采样点Mi的可视锥范围内且视点距采样点的高度在近视深和远视深之间。
(2)采样点Mi的可视锥与平面Ωi的交平面上各点到轴线C0T的距离最近。
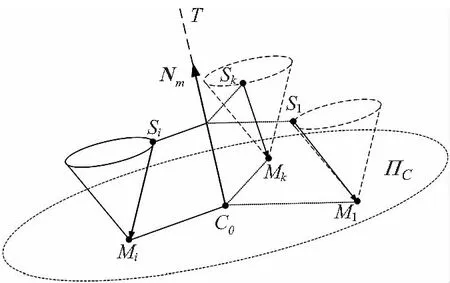
图4 视点位置及扫描方向生成
2.4 扫描路径生成
生成扫描路径的过程实质上是对视点Si连接顺序确定和扫描姿态调整的过程。由于视点Si各点之间相对距离近,且围绕包容球轴线C0T进行布置,为了减少机器人调整位姿的时间,扫描路径生成分为以下步骤进行:
(1)确定视点连接顺序:首先对环轴线的各个视点沿顺时针方向进行连接,最后对位于轴线C0T上的视点进行扫描。
(2)规划相邻视点路径:测头在相邻两个视点Si-1Si之间移动时,为了扩大视场FOV的集合的覆盖范围,测头以恒定速度通过圆形混合区进行线性移动,并选择不同的交融半径以构建平滑路径。
(3)验证扫描路径是否与被测表面或环境发生接触。
3 三维扫描实验与评价
本研究选择Creaform公司的HandyScan300手持式三维扫描仪作为扫描设备对曲面模型进行扫描实验。HandyScan300扫描仪具有扫描精度高、速度快等优势,其主要参数为:视距为300mm,景深高度为250mm,视距高度下激光线覆盖范围为225mm×250mm。被测物体及三维扫描实验现场如图5所示。
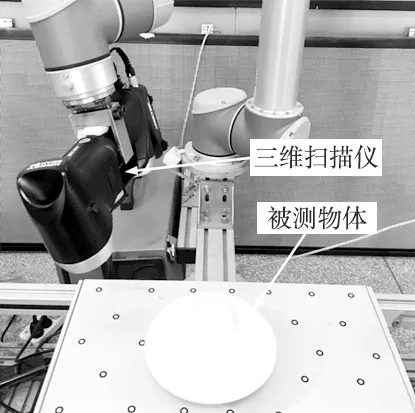
图5 三维扫描实验现场
对曲面模型进行粗扫掠,将获取的点云数据通过Geomagic软件缝合为面片,图6a为曲面模型的粗扫掠结果。对面片构成的模型进行分析,如图6b所示的红色区域标记了一片包含较大的缺失区域的曲面,表示为H1;如图6c所示的红色区域标记了两片包含较小的缺失区域的曲面,分别表示H2和H3。
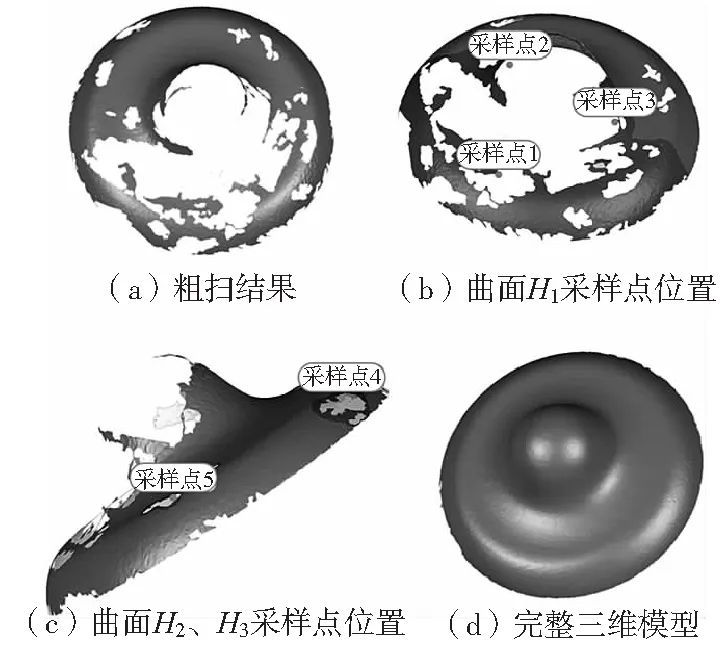
图6 动态路径三维扫描过程
分别计算包含3个曲面的最小包容球,球心C0坐标和半径R0如表1所示。
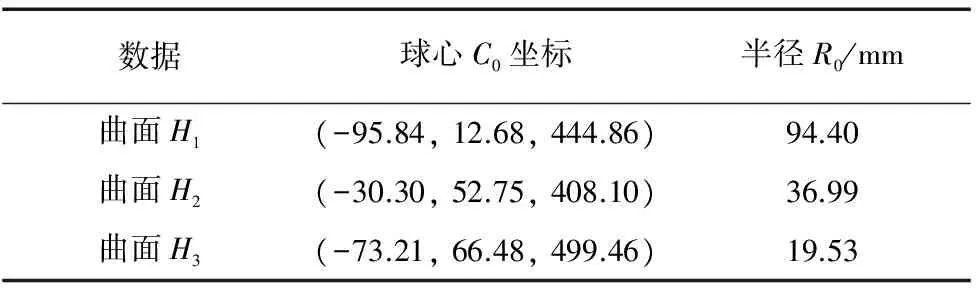
表1 曲面数据
根据扫描仪视距、景深高度及激光线覆盖范围等参数之间的几何关系[13],可以计算出视域圆直径d为187.5mm,根据包容球半径R0与d的关系分别计算三个曲面的采样点,采样点数量、编号及坐标值如表2所示,采样点位置及其编号如图6b、图6c所示。

表2采样点规划
根据上述视点规划方法对视点计算,视点坐标和扫描方向向量的坐标表达形式如表3所示。

表3视点及扫描方向生成
采用上述扫描路径生成方法对该曲面进行二次扫描补全缺失的点云数据,获得的完整三维模型如图6d所示。
通过扫描实验验证了基于动态路径规划的三维扫描方法可以通过采样点、视点的自动规划,生成动态扫描路径,从而获取被测表面完整的三维信息,规划算法清晰明了且易于实现。
4 结论
针对三维扫描过程中出现的三维信息局部缺失情况,本文设计了一种基于动态路径规划的三维扫描方法,对被测表面进行粗扫掠和二次扫描。通过对该扫描方法进行理论分析及实验验证,得出以下结论:
(1)运用了最小包容球概念划分扫描区域,可以对三维信息缺失区域的表面形貌进行有效估计,为采样点的自动规划提供了数据支持。
(2)引入了三维扫描约束条件和可视锥概念,为视点和扫描方向的规划提供了理论依据,有效地缩短了扫描路径长度,提高了扫描效率。
(3)对动态路径三维扫描方法进行实验,验证了该扫描方法具备可行性并可以有效提高扫描精度,对两步路径规划的研究具有指导性意义。
[参考文献]
[1] Li Y F, He B, Bao P. Automatic view planning with self-termination in 3D object reconstructions[J]. Sensors and Actuators A:Physical, 2005, 122(2):335-344.
[2] Wu Q, Zou W, Xu D. Viewpoint planning for freeform surface inspection using plane structured light scanners[J]. International Journal of Automation and Computing, 2016, 13(1):42-52.
[3] Kriegel S, Rink C, Bondenmuller T, et al. Nest-best-scan planning for autonomous 3D modeling[J]. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2012(1):2850-2856.
[4] Son S, Kim S, Lee K H. Path planning of multi-patched freeform surfaces for laser scanning[J]. The International Journal of Advanced Manufacturing Technology, 2003, 22(5-6):424-435.
[5] Zhao H B, Kruth J, Ven Gestel N, et al. Automated dimensional inspection planning using the combination of laser scanner and tactile probe[J].Measurement, 2012, 45(5):1057-1066.
[6] 卢科青,王文,陈子辰. 未知自由曲面数字化自适应采样方法[J]. 机械工程学报,2010,46(9):143-149.
[7] 李雄兵,杨岳,胡宏伟,等. 面向超声检测的曲面自动测量[J]. 中南大学学报,2010,41(1):194-199.
[8] Seokbae Son, Kwan H Lee. Automated scan plan generation using STL meshes for 3D stripe-type laser scanner[J]. Computer Science and Its Applications, 2003,2669:741-750.
[9] 段裕刚,刘志兵,王西彬,等. 基于可视锥理论的五轴加工刀具碰撞检验方法[J]. 计算机集成制造系统,2014,20(11):2814-2819.
[10] 梁延德,孙捷夫,何福本,等. 组合式螺旋桨重心误差评价与修正[J]. 中国机械工程,2015,26(6):756-761.
[11] 何福本,梁延德,孙捷夫,等. 基于包容球理论的大型桨叶去重平衡的优化研究[J]. 机械工程学报,2015,51(11):64-70.
[12] 赵仕俊,张朝晖. 无线传感器网络正六边形节点覆盖模型研究[J]. 计算机工程,2010(20):113-118.
[13] 艾小祥,俞慈君,方强,等. 基于遗传算法的机翼壁板扫描路径优化[J]. 浙江大学学报,2015,49(3):448-456.
(编辑李秀敏)