混合动力游艇建模与仿真
2018-03-31郑笑
郑 笑
(上海海事大学 商船学院,上海 201306)
0 引 言
随着科技不断发展,船舶上运用的新型技术越来越多。船舶混合动力技术作为一种新型船舶技术,是船舶未来发展的方向,能有效缓解当今社会的能源、环境问题。据统计,全球航运业的CO2排放量大概占全球温室气体排放量的 4%[1]。近几年,随着全球变暖,温室气体排放等问题越发严峻,国际海事组织(International Maritime Organization,IMO)逐步加强对船舶尾气排放的限制。未来纯电动船舶(即以电力推进系统为主的船舶)将得到大力发展,但对功率需求较大的船舶来说,现阶段大部分纯电动船舶的电力推进系统不能提供期望的速度和加速度,续航能力得不到保障,且电力推进会受到船舶质量和空间的限制及能源存储技术的影响[2]。在该情况下,研究混合动力电动船舶可为船舶从柴油发电机组单独供电过渡到纯电动供电提供可行性方案[3]。
目前,将混合动力技术成功运用到船舶上的案例[4]并不多。一些科研人员已将其有关混合动力技术的设想应用到舰船上。例如:2003年,世界上第一艘燃料电池和柴-电混合动力系统潜艇在德国基尔港实现首航[5];2012年,日本商船三井与三菱重工发布配备光伏发电装置的混合动力运输船[6]。该混合动力运输船配备的光伏发电装置最大输出功率达到160kW,航行工况下所发的电力会储存在超大容量的锂离子电池中,能提供船舶靠港期间的部分电力需求;与以往相比,其发电时的CO2排放量可减少4%左右[7]。 该运输船同时配备有柴油发电机和电力供应系统,当船舶处于停泊状态时,可通过光伏发电来减少尾气排放。
在以上研究的基础上,针对小型混合动力游艇设计一种基于蓄电池、柴油发电机组的并联混合动力能源系统,并对整个系统进行仿真分析。
1 系统建模
混合动力系统通常有串联、并联和混联等3种传动系统模型。图1为并联混合动力船舶的传动系统,包含柴油机、转矩耦合器、蓄电池组和电机。

图1 并联混合动力船舶的传动系统
与串联结构相比,并联结构中的发动机和电动机可同时驱动船舶,动力性能更加优越;同时,采用并联结构的混合动力船舶工作模式较多,可适应多种工况,发动机无须进行能源的二次转换,综合油耗更低、尾气排放更少;此外,通过逆变器,电机也可反过来作为发电机发电,并给蓄电池充电[8]。图2为并联混合动力系统模型结构图。
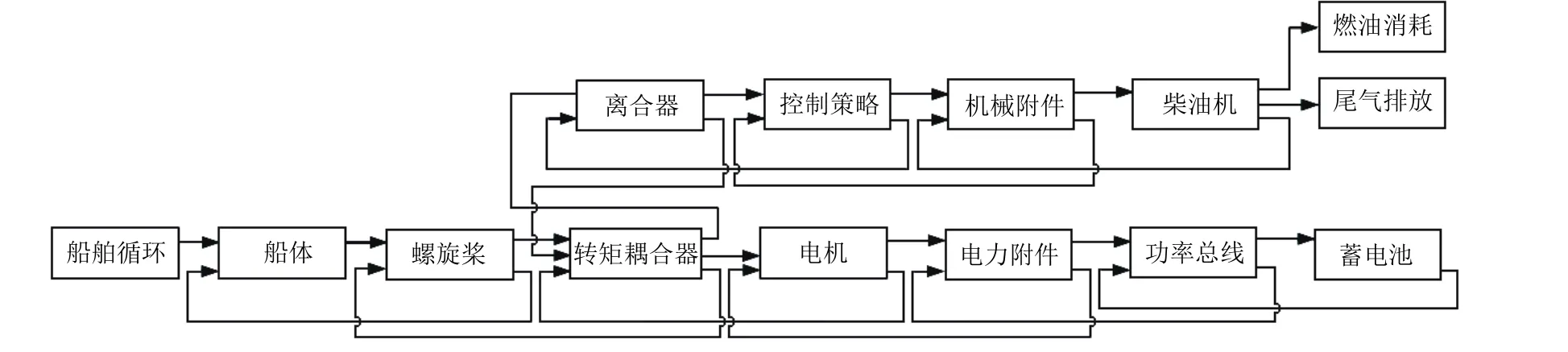
图2 并联混合动力系统模型结构图
从图2中可看出,并联混合动力系统由14个模块组成,分别代表动力系统不同的部件。大部分模块都有2个输入接口和2个输出接口。
1) 模型中自左向右的箭头传递的信号代表功率需求或目标转矩和转速,该计算路径被称为后向计算路径。船舶运行循环工况为:根据目标工况计算出目标船速,将其输出到船体模块;目标船速经过螺旋桨模块、变速器模块、离合器模块和附件模块的传递输出到发动机模块。传递过程中,在考虑自身损失、传动比换算及输出限制的情况下,各模块根据输入数据计算出输出数据并将其输出。
2) 模型中自右向左的箭头传递的信号代表各模块实际的转矩和转速,该计算路径被称为前向计算路径。根据目标船速,发动机模块通过查表计算得到其实际输出转矩、最高转速和排放数据;将排放数据输出到排放处理模块之后,排放处理模块根据该数据计算出实际排放量并输出结果;同时,发动机模块通过箭头将实际转矩和转速自右向左传给各模块。这些模块在考虑自身损失、传动比及输出限制的情况下根据实际输入量计算其实际输出量。船体模块根据牵引力和实际船速计算下一步长的数据。在整个运行循环工况的周期内,动力传递过程持续循环进行。
1.1 船体
在开阔的水面上,船体的阻力总成见图3。

图3 船舶的阻力总成
为计算船体的阻力,必须对船体进行流体动力学分析。文献[9]给出一种用来评估船体表面的流体动力性能、计算表面阻力的方法,计算式为

式(1)中:Rf为摩擦阻力,N;(1+K1)为船体摩擦因数,K1的大小取决于流体的雷诺数,对于小型船舶,一般取1.22~1.45;Rapp为附体阻力,N;Rw为兴波阻力,N。
1.2 螺旋桨
螺旋桨可分为定距桨和变距桨。螺旋桨的转矩和转速的计算式为

式(2)~式(6)中:VS为船舶的航速,m/s;VA为螺旋桨进速,m/s;ω为兴波系数;n为螺旋桨转速,r/s;D为螺旋桨直径,m;J为螺旋桨进速比;KT为螺旋桨推力系数;KQ为螺旋桨转矩系数;ρ为海水的密度,kg/m3;Q为螺旋桨的转矩,N.m;T为螺旋桨的推力,N。在计算出进速比之后,通过螺旋桨的敞水特征曲线可查得KT和KQ,进而得出螺旋桨的转矩和推力。
1.3 柴油机
建立发动机模型需考虑最大转矩的限制、发动机温度的影响、燃油消耗及排放后的处理等因素。这里采用数值分析法建立发动机的模型[10]。

式(7)~(10)中:P为柴油机功率,kW;T为发动机转矩,N.m;ω为发动机转速,rad/s;Tcor为发动机修正转矩,N.m;J为发动机转动惯量;C为发动机的燃油消耗率。
1.4 电池
蓄电池的工作过程可用一个非线性函数来表示,且与多个实时变化的参数有关。作为混合动力推进系统的能量源之一,其能迅速响应负载变化,使需求功率与输出功率保持平衡。电池的荷电状态SOC表示电池剩余容量与电池完全充电状态下容量的比值,取值范围为0~1。SOC=0表示电池放电完全,SOC=1表示电池完全充满。蓄电池可存储的电荷量是固定的,且在放电时需考虑最小电压的限制;在要放电时需首先充电。其充电过程受库伦效率的影响及最大电压的限制,在整个循环工况内需保证蓄电池组的SOC平衡。可将蓄电池看作是一个可存储电荷量的、各参数与其SOC值有关的等效电路,用一个理想的开路电压源串联一个内电阻来表示。蓄电池荷电状态SOC的计算式为

式(11)~式(14)中:SC0为SOC的初始值;ΔSC为SOC的改变量;Ib为电池的端电流;E为电池的额定容量;Pess为电机有效充放电功率;VOC为电池等效电路理想电压源;Rb为电池内阻[10]。在电池充电或放电过程中,其等效电阻Rb的值是不同的,当电池荷电状态SOC保持在0.3~0.7时,可近似认为Rb=Rdis=Rchg。
2 仿真结果
为验证设计的并联混合动力系统的实用性及准确性,用 MATLAB/Simulink软件对该方法进行仿真分析。选用太阳鸟公司生产的长26.5m,宽6.2m,最大航速32kn的“凤鸟88 inch”游艇进行仿真;仿真中选用最大功率为260kW的四冲程发动机,其额定转速为1800r/min;蓄电池组共包含60个电池,单个电池的电压为12V,电流为26A,设定电池组初始SOC值为0.7。通过对并联混合动力下游艇的典型加减速工况的数据进行仿真并与单一传统的柴油机驱动相比较,得到油耗、电池SOC变化及污染物排放情况对比(见图4~图8)。
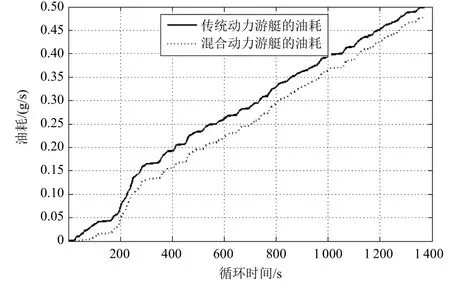
图4 油耗对比

图5 电池SOC变化图

图6 HC排放对比

图7 CO排放对比
由图4~图8可知,在同种循环工况下,相对于以单一柴油机作为动力源的游艇,混合动力游艇的油耗更低,污染物排放量也能得到明显减少,并能使电池的SOC保持在合理的范围内。这里按游艇每天工作 8h计,一年作业 365d,柴油价格取5.5元/L。结合电池的投入成本,使用混合动力系统的游艇相比使用纯柴油机的游艇,一年可节省燃油25%,节省成本10万多元,减少污染物排放约10%,可起到很好的节能减排的作用。

图8 NOx排放对比
3 结 语
本文对采用并联混合动力系统的游艇的模型结构及其各主要部件进行了建模分析,并在MATLAB/Simulink中对游艇的典型工况进行了仿真计算,通过计算机仿真有效验证了该并联混合动力系统的可行性及正确性。根据仿真结果,设计的并联混合动力系统可满足游艇大部分工况的要求,能增强船舶的续航力、达到节能减排的目的,并能使电池的SOC保持在一定的范围内。此外,还可对并联混合动力系统的控制策略进行优化,使其油耗更少、排放更优。
【 参 考 文 献 】
[1] 高迪驹,沈爱弟,褚建新,等. 混合动力船舶的能量管理与控制策略[J]. 上海海事大学学报,2015, 36 (1): 70-74.
[2] 孙彦琰,高迪驹,褚建新. 混合动力电动船舶功率分配控制方法[J]. 计算机测量与控制,2014, 22 (12): 3938-3939.
[3] 张敏敏,康伟. 一种混合动力电动船舶能源管理系统的设计[J]. 中国水运,2011, 11 (12): 67-69.
[4] 袁裕鹏,王凯,严新平. 混合动力船舶能量管理控制策略设计与仿真[J]. 船海工程,2015 (2): 95-98.
[5] 严新平. 新能源在船舶上的应用进展及展望[J]. 船海工程,2011, 39 (6): 111-115.
[6] 孙彦琰,高迪驹,褚建新. 混合动力电动船舶模糊逻辑控制策略[J]. 船舶工程,2014, 36 (3): 67-70.
[7] 李洪跃,朱瑾. 串联型混合动力船舶能量控制策略研究[J]. 机电设备,2015 (1): 21-25.
[8] 赵红,郭晨,吴志良. 船舶电力推进系统的建模与仿真[J]. 中国造船,2006, 47 (4): 51-56.
[9] 王磊. 船体多分段综合日程计划模型的研究及其系统实现[D]. 哈尔滨:哈尔滨工业大学,2008: 1-88
[10] 席龙飞,张会生. 小功率内河船舶油电混合动力系统的建模及仿真研究[J]. 机电设备,2014, 31 (2): 23-27.