智能公交小车系统的设计
2018-03-30宋汝洋
宋汝洋
摘要
近年来,科学技术的不断进步以及信息技术的飞速发展促使自动化、智能化技术愈发普及,并被广泛运用到了生产自动化、交通运输等领域中去,其中,智能公交小车作为一种集制作成本低、电路结构简单、易于调试等优势于一身、只需借助编程手段便可以完成特定任务的小型化机器人,备受人们的青睐。本次设计基于STC89C52单片机,就智能公交小车的软件、硬件系统的设计加以分析。
【关键词】智能公交小车 单片机 红外光电传感器
1 系统整体设计方案
本设计采用STC89C52RC单片机作为智能公交小车的核心控制单元,借助红外光电传感器,检测地面的黑色轨迹,以期促进智能公交小车自动循迹功能的实现。与此同时,通过超声波对小车与障碍物之间的距离进行测量,并凭借对距离的判断,最终达到避障目的。当超声波感应到小车运行道路前方有障碍物存在时,小车会自动放慢前行速度;当超声波感应到小车前方的障碍物距离小车较近时,小车会自动停止运行,直到超声波感应到前方障碍物被移除,才恢复到正常运转状态;当小车运行到某一固定点,并接收到该站点所发出的红外信号时,小车会停止继续前行。
2 硬件设计
2.1 电源设计
鉴于本次所设计的这款智能公交小车属于移动设备,在电源部分不能使用交流电为小车提供电源,因而本次设计使用LM7805芯片提供电源,电路内部有过电流保护、过载保护以及过热保护电路,完全可以为小车主控电路提供电力要求。LM7805芯片的三个引脚,根据芯片的标注(电位由高到低)可知,最左边的引脚是电路的高电位,也即传输数据的输入端,中间的引脚是连地的GND端,最右边的引脚为电路的低电位,即传输数据的输出端。一般情况下,LM7805芯片可供应5V左右的电压,在散热达到一定程度的情况下,还能够提供5V左右的输出电压,误差值通常在±0.2V左右。
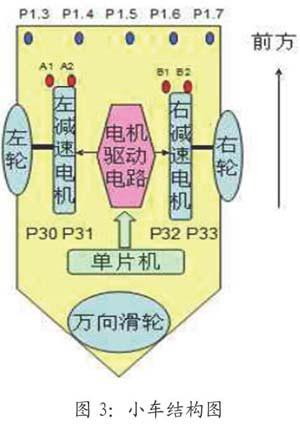
2.2 电机驱动电路
为促使智能公交小车的轮子能够在前进、后退、转弯等方面实现正常运转,本次设计主要以L298芯片为驱动模块,使用的是前面两个驱动轮,后面一个从动轮,这样设计可以使小车的运行更加流畅,而且当小车在遇到障碍物转弯的时候能够更快的实现转弯功能。
电机驱动电路图,如图1所示。
2.3 红外传感器设计
在本次系统的设计过程中,STC89C52单片机控制着整个红外传感器模块,只要模块运行,微控制器的I/O口便会发出控制信号,并产生一个正弦波,然后驱动发射部分产生多个脉冲信号。而一旦这些脉冲信号检测到小车道路前方有障碍物存在,那么所检测到的数据便会被反射传输给微控制器,并经过接收模块将这些信号放大,从而做出相应的指令。根据条件有不同的分类,本次设计则利用的是光电效应的,也就是根据物体材质对红外线不同的辐射能力进行对小车前方障碍物的规避。
3 系统软件设计
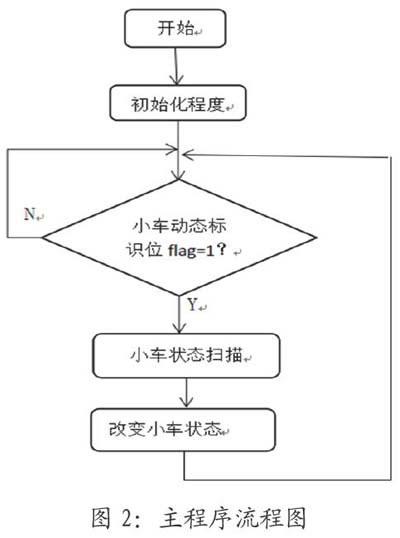
3.1 主程序设计
本次设计的主程序流程图如图2所示。当为小车插上电源后,启动初始化子程序,待程序进入初始化状态后,就小车的动态标识位数值加以判断,假设Flag的值为0,则继续进行小车动态标识位的扫描;若所扫描到的Flag数值为1,则可对小车的状态信息加以调用,并在此基础上通过扫描子程序,得出状态标志值,再通过调用改变小车状态子程序,将扫描小车状态得到的标志值作为改变小车状态子程序的实参,执行改变小车状态子程序,运行完成后,回到循环开始,重新执行以上操作,直至系统断电位为止。
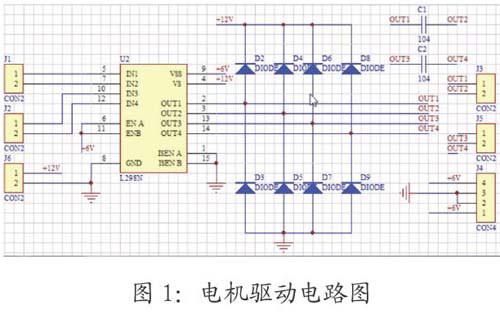
3.2 扫描程序设计
通过借助五个光电感应器,就小车的运行轨道进行循迹。小车的具体结构图如图3所示。
3.3 电机控制程序设计
为能够实时改变小车状态,本次设计主要采用两个电机。鉴于单片口较低的输出电流尚不能完成对电机的直接驱动转动,因而本次设计即以L298芯片为驱动模块,使用前面两个驱动轮,后面一个从动轮,来驱动电机转动。
4 结束语
本文通过对智能公交小车的软硬件系统的研究发现,借助单片机,能够实现对智能公交小车内部程序的控制,并可以结合已输入程度,就小车行驶方向及速度等加以调整。在当今这个交通运输日益发达的时代,通过设计智能公交小车,不仅使汽车在面对各种问题和地形,都可以自动改变行驶状态,如遇到悬崖会自行倒退,遇到前方有汽车或障碍物阻挡时可以自动改变方向,而且对于汽车行驶的安全性的提高也大有裨益。
参考文献
[1]王勇申,初俊博,孙恒震,等.智能小車的设计与应用[J].科技传播,2016(07).
[2]谢富珍,戈林发.基于51单片机的智能小车设计[J].新余学院学报,2015(04).
