微型扑翼飞行器的横向控制与设计
2018-03-30董维中王志东
董维中 ,崔 龙 ,王志东 ,2
(1.中国科学院大学 中国科学院沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016;2.日本千叶工业大学 先进机器人系,千叶 日本)
微型扑翼飞行器通过高频扑动产生推力、升力,是一种典型的欠驱动系统。20世纪90年代以来的研究表明[1-2],当飞行器翼展小于15 cm时,扑翼飞行在飞行效率、操纵性上相比传统固定翼、旋翼飞行器具有显著优势。高静音、高效率、操纵的灵活性等特点,使得微型扑翼飞行器具有令人振奋的军事、民用研究前景。
文献[3-4]研究成果表明,扑翼飞行器气动力产生的原因归纳为延迟失速、旋转环量、尾迹捕获、卡门涡街等机制。目前,这些产生机制已经试验和理论验证,它们形成的经验公式已经可以数值化地应用于飞行器研制上。马里兰大学、俄亥俄大学、千叶工业大学相继开展了相应的工程研制,其中著名的斯坦福MFI项目和哈佛大学的Wood教授等接近了实用。扑翼飞行器系统研制涉及机械、材料、力学、控制、电子、通信等多个学科,是一项尖端高技术领域。
在此,介绍一种扑翼飞行器的总体设计,根据气动力产生机制进行气动力、力矩计算;依据运动学、动力学原理建立横向飞行器模型,并在局部配平状态下进行线性化处理;针对准定常气动建模的不确定性引入状态扩展观测器;针对3种运动模态设计横向控制律。最终进行半物理仿真验证。
1 微型扑翼飞行器
1.1 微型扑翼飞行器总体设计
所设计的微型扑翼飞行器系统[5-6],如图1所示,组成部分主要包括碳纤维机体、传动机构、X型翼、机载电路板等。
X型翼最易实现,所采用的驱动电机数量最少,单自由度地上下扑动,翅翼在扑动过程中发生大形变。根据流-固耦合效应,产生前向和侧向分力,从而形成飞行器的推力。

图1 微型仿昆虫扑翼飞行器Fig.1 Miniature insect like flapping wing aircraft
所设计的机体采用碳纤维浸泡软木工艺制作,传动机构采用柔性铰链来实现,如图2所示。
在飞行器机体质心处安装的微型电机与DELFLY2相同,采用无刷直流电机,其内部如图3所示。

图2 柔性铰链Fig.2 Flexure hinge

图3 电机内部Fig.3 Internalof motor
该扑翼飞行器具备一定的负载能力,其最重要的负载是机载电路板。该电路板仅完成地面遥控操作。电路板的核心是51单片机,进行通信解码,并控制微型电机。
类似于固定翼飞机,需要进行地面遥控飞行来测试总体设计。具体的遥控操作过程如下:地面遥控器的摇杆信息经过编码后发送至机载电路板,信号经过天线传送给耦合共振芯片,经过数字转换之后送入单片机,单片机随后完成对地面摇杆信息的解算,之后形成电机指令送至功率芯片,接着变为电流信号控制电机转速,从而保证飞机按照地面作员的指令进行机动。
所用机载电路板由中国科学院数学与系统研究院研制,其接收电线能够确保在方圆50 m半径内操纵飞行器飞行。
1.2 微型扑翼飞行器气动力计算
为了建立飞行器数学模型,就要先计算作用在飞行器上的气动力,这也是扑翼飞行器的研究难点之一。气动力计算公式[6]为

式中:Fvi为延迟失速机制形成的气动力部分;Г为翅翼在扑动平面上的环量;η˙为翅翼迎角的变化速率。
经过数值分析,给出准稳态气动力计算归一化处理结果为

式中:A,f分别为翅翼的扑动角幅值和扑动频率。通过改变A,f以影响准稳态气动力的变化。
2 微型扑翼飞行器横向数学模型
建立数学模型的基本原则是:忽略翅翼质量,不再考虑翅翼惯量的影响;采用Newton-Euler原理建立运动学、动力学方程,用于描述控制变量和飞行器速率、位置之间的映射关系。
根据动量定律,有

式中:X,L,N分别为横向控制的力和力矩。模型线性化是对这些力和力矩X,L,N关于k1和k2求偏导数,得到一系列动力、力矩导数系统,即

同理可得其他动力系统,进而完成模型线性化处理。
另外,根据滚转角和偏航角的定义

式中:p,q分别为滚转、偏航的转动速率。
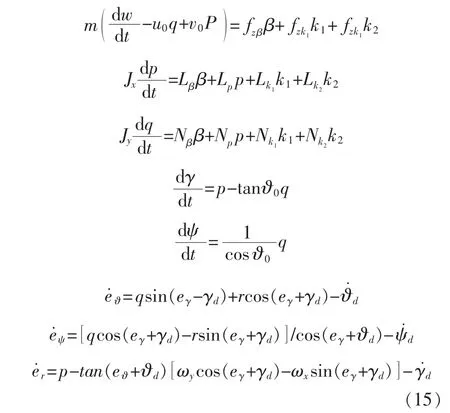
在此,得到飞行器的横向数学模型:

式(9)描述了滚转、航迹的角运动;式(10)~式(12)描述了姿态的转动速率。式中: fi,Lj,Nj分别为气动力、力矩导数系数;k1,k2为控制变量。气动力、力矩导数系数代表了控制器和真实气动力、力矩之间的关系,为一组量纲系数,可以通过对气动力、力矩求一阶导数而得到;控制变量是控制器的输出值,为一组中间变量,它们与气动力、力矩导数系数相乘就可以得到真实的气动力、力矩。
在此,控制器的基本思想是间接控制,不同于纵向控制,不直接影响扑动角的幅度A和频率f,而是操纵横向数学模型中式(10)~式(12)的 k1和 k2值。控制目标就是设计一套控制器。该控制器的输入为飞行器的状态变量,控制器的输出为k1和k2。这些控制器能够满足不同模态的飞行要求。
3 扩展观测器
控制器的输入为飞行器状态变量,由于微型扑翼飞行器的负载能力有限,不能加载足够的传感器,因此状态变量不能直接测量得到,而只能通过无线通信链路获得间接信息。在此使用扩展观测器获得变量估计值。
需要指出的是,扩展观测器是非线性控制领域内发展迅速的一项极具优势的技术。它满足非线性系统的分离原则,可以在有限时间内对系统的不确定项进行评估和补偿。
在此,扩张状态观测器设计的基本思想是:将作用在机体上的准定常气动力当作集总扰动来进行估计,其结构为

式中:ai为观测器的反馈增益;ζi+1为扩展变量,用于观测补偿 fzβ;观测器非线性函数 fal(ε,δ,β1)定义为

式中:δ为观测器的观测阈值。
4 飞行器横向控制
微型扑翼飞行器控制系统的总体结构如图4所示,包括:1个扩展观测器,观测器输出是系统状态变量的估计值;1个主回路上的控制器,它包括内环和外环2个部分,内环控制器完成对速率值的解算,外环控制器完成飞行器姿态角的控制。为避免动态面控制DSC(dynamic surface control)的微分爆炸现象,在控制设计步骤中引入1个扩展观测器作为滤波器。

图4 控制器和观测器总体结构Fig.4 Overall structure of controller and observer
针对控制器3种模态进行设计,分别为航向保持模态控制律、协调转弯模态控制律、航迹保持模态控制律。
4.1 航向保持控制设计
4.1.1 航向保持
航向保持的定义是飞行器在阵风的影响下产生的航向偏离。为了使飞行器按照预先指令保持航向角、偏航角跟踪期望输入,必须对控制变量k1和k2进行相应的计算。
微型扑翼飞行器航向保持控制必须采用联合控制方式,同时控制侧滑角、滚动角2个通道。
4.1.2 航向保持控制律
控制目标为得到适合的控制变量k1和k2,使得航向角输出误差收敛到0。
在此采用动态面控制方法,其基本思想如下:定义误差滑动面;引入观测器对模型中的气动不确定性进行估计;根据Lyapunov稳定性原理,只要找到控制器输出值k1和k2满足Lyapunov的一阶导数为负值,则系统即为稳定的;进行控制律设计,找到k1和k2。
同理,适应于协调转弯模态控制律,航迹保持模态控制律。
步骤 1给出 1 组定义,x1=[eϑ,eψ,er]T,x2=[w,p,q]T给出飞行器系统方程为
步骤2定义1个滑动平面

然后定义1个Lyapunov函数对其求导,得


步骤3引入扩展观测器式(13),使用 ζi+1对f(ζi+1)进行补偿, f(ζi+1)表达了气动力的建模不确定性。最终完成观测器-控制器联合设计。
步骤4根据Lyapunov稳定性,选取合适的观测器和控制器系数,可满足式(18),这意味着系统是稳定的。
步骤5控制律设计。给出航向保持控制律为

4.1.3 仿真实验
航向保持模态的仿真实验参数设置为:选择ai=0.1;系数 Iγ˙=0.5,Iγ=1,Iψ=0.8。 在半物理试验台使用MATLAB/simulink进行仿真。可以看到,滚转角误差在有限时间内收敛到0,飞行器进而能够保持航向角。航向角控制效果如图5所示。

图5 航向角误差输出Fig.5 Heading error output
仿真实验结果表明,所设计的航向控制模态控制器,可以在有限时间内使航向角的跟踪误差收敛到0,故系统是稳定的。
4.2 飞行器协调转弯控制设计
4.2.1 协调转弯
协调转弯的定义是在水平面内飞行器保持一定的姿态进行转弯,飞行器航迹矢量在转弯半径之内持续改变角度。
在飞行器协调转弯时,根据升力和重力平衡原理,坐标系垂直方向升力与重力数值相等。在水平面内,飞行器以预定指令转弯,其角速率为

协调转弯模态满足:稳态滚转角等于常数,即滚转角误差收敛为0;高度升降速度为0。
4.2.2 协调转弯控制律
因该观测器和控制器的结构设计与航向保持控制器相同,在此仅介绍控制律设计。
协调转弯控制律是在航向保持基础之上的高级运动模式,这里引入控制变量的积分模块增加系统的阻尼,联合航向保持的控制律。控制变量k1和k2引入滚转、转弯角速率,引入β角以减小侧滑的影响,协调转弯控制律为


通过升力与扑动频率的关系,可得到f控制器的输入值,从而使飞行器稳定在原有的高度。
4.2.3 仿真实验
协调转弯模态仿真实验的参数:选择ai=0.1;系数 Iγ˙=1.5,Iγ=1,Iψ=1.8。 使用 MATLAB/simulink 进行仿真实验,滚转角和高度控制效果如图6所示。由图可见,滚转角的误差在有限时间内收敛到0,飞行器进而能够保持偏航角和高度。

图6 协调转弯模态仿真实验Fig.6 Simulation experiment of coordinated turn mode
仿真实验结果表明,协调转弯模态控制器的设计,可以在有限时间内使得滚转角和高度的跟踪误差收敛到0,因此系统是稳定的。
4.3 航迹控制设计
4.3.1 航迹控制
航迹控制主要涉及飞行器运动学参数的变化。飞行器轨迹运动在水平面内的运动,可分为沿航迹切线方向和侧向偏离运动2种。
4.3.2 航迹控制律设计
因其观测器和控制器的设计与航向保持控制模态相同,故仅介绍航迹控制律设计。
翅翼的扑动存在方向的振动,这里引入了多个通道的耦合。控制律中必须考虑侧向偏离距离z,给出航迹控制律为

式中:ψg和zg分别为预定的航迹角和偏离距离。
4.3.3 仿真实验
航迹控制模态仿真实验参数:选择ai=0.1;系数Iγ˙=3,Iγ=1,Iψ=1.2。 使用 MATLAB/simulink 进行仿真实验,航迹角输出误差控制效果如图7所示。由图可见,航迹角误差在有限时间内收敛到0,系统是稳定的,飞行器能够保持航迹角。

图7 航迹角误差输出Fig.7 Track angle error output
所研制的扑翼飞行器最终在试验台和实验室内部进行了测试[7]。图8所示为室内飞行测试,图9所示为扑翼飞行器的试验台半物理测试。
实验室内飞行测试,结果表明飞行器的升力和推力满足飞行要求,并在负载能量的限制下,可以完成系统的稳定飞行,初步验证了通信链路的可行性以及地面站估算系统状态技术方案的实用性。试验台测试表明,所设计制造的柔性翅翼可以应用到实际工程样机上去。

图8 实验室飞行测试Fig.8 Laboratory flight test

图9 飞行器试验台测试Fig.9 Aircraft test bench test
5 结语
微型扑翼飞行器总体设计在室内飞行测试中经受了较长飞行时间的考验,说明翅翼设计能够提供足够的升力,对电路板的负载能力达到了要求;采用的气动力计算公式是目前逼近精度较高的经验公式;在3个横向运动模态的仿真实验中,具有工程应用前景的微型扑翼飞行器控制律是有效的,飞行器系统表现出较高的稳定性和控制精度。研究成果为后续真正实用的工程研制奠定了基础。
[1]袁昌盛,李永泽,谭健.微扑翼飞行器控制系统相关技术研究进展[J].计算机测量与控制,2011,19(7):1527-1529.
[2]Ramamurti R,Sandberg W C.A three dimensional computational study of the aerodynamic mechanisms of insect flight[J].Journal of Experimental Biology,2002,60(18):110-118.
[3]Weis-Fogh T.Quick estimates of flight fitness in hovering animals including novel mechanisms for lift production[J].J Exp Biol,1973,59(1):169-230.
[4]Ellington C P.The Aerodynamics of Hovering Insect Flight IV:Aero-dynamic Mechanisms[J].Phil Trans R Sco Land,1984,305(1122):145-185.
[5]Orlowski C,Girard A,SHYY W.Four wing flapping wing micro air vehicles[C]//Proceedings of the 2010 AIAA Guidance,Navigation and Control Conference.AIAA,2012.
[6]Gordon J,Berman Z,WANG JANE.Energy-minimizing kinematics in hovering insect flight[J].J Fluid Mech,2012,582:153-168.
[7]杜亚娟.半实物仿真综合实验台控制系统方案[J].计算机工程,2010,36(22):233-235.
