基于蚯蚓体表特征的仿生深松铲设计及分析
2018-03-26邱兆美张海峰毛鹏军马延武
邱兆美, 张海峰, 张 伏, 杨 欣, 王 俊, 毛鹏军, 马延武
(1.河南科技大学农业工程学院,河南洛阳 471003; 2.河北农业大学机电工程学院,河北保定 071001)
近年来,由于地球生态环境的恶化,传统方式的连年耕作,导致土壤耕层变浅,土地压实板结,土壤中有机质含量下降,蓄水保墒能力变差,透水、透气性降低,最终导致作物的根系生长发展空间减小,产量下降,因此人们提出了新的耕作方式——保护性耕作,通过免耕、少耕的耕作方式,增强土壤蓄水保墒能力,减少土壤有机质的流失[1-2]。深松作业作为土壤保护性耕作技术之一,已经在大范围内开始使用。深松作业主要是在不翻转土壤的情况下,通过利用深松铲打破土壤的坚硬地层来有效改善土壤耕层结构,提高土壤松碎度,改善土壤、水和空气比例,增强土壤蓄水保墒能力,增强土壤透水性和透气性,改善作物的生长环境,提高作物产量。然而,在深松过程中尚存在深松时阻力较大、深松后土块较大、土壤蓬松度不高等问题[3-8]。
目前,国内外对具有良好掘土功能的动物进行了研究,且取得了较好的研究结果。李博等以狗獾爪趾为仿生原型,对深松铲减阻进行仿生结构设计[4,9];佟金等以小家鼠爪趾为仿生原型,对深松铲的减阻进行仿生结构设计[10]。近些年来,仿生学在农业上的应用越来越受到人们的重视,许多学者发现蝼蛄、鼠、穿山甲、公鸡等动物在掘土过程中的阻力较小,将这些动物的一些优良的土壤工作特性运用到耕作部件的减阻结构设计中,已经成为农业耕作领域研究的一大特点。张强等设计仿生沟形深松铲和复合形态深松铲,并进行了有限元模拟分析和室内土槽耕作阻力测试[11-12];龚皓晖等通过分析鼠趾良好的掘土能力,对传统深松铲进行结构优化,与传统的深松铲进行有限元的理论分析和室内试验相比,仿生深松铲的减阻效果显著[13];张金波等基于指数函数,针对家鼠的爪趾曲线对深松铲进行仿生减阻设计[14]。
本研究在前人的基础上,对传统深松铲进行结构优化,将蚯蚓在土壤中良好的掘土能力和对土块良好的松碎能力应用于深松铲的减阻结构设计中,使深松铲具有良好的减阻效果和松碎土块效果。
1 仿生波纹形深松铲柄设计
由于深松过程中存在深松作业时耕作阻力大,深松后土块大,不易碎,土壤蓬松度小等问题,因此根据蚯蚓与生俱来的减黏降阻特性和对土块的松碎特性,加工制造波纹非光滑深松铲柄。
1.1 蚯蚓在土壤中的穿行过程
蚯蚓作为土壤动物具有优异的脱土、减黏降阻能力,其体表存在波纹状几何非光滑表面[15-16]。蚯蚓在穿行过程中,波纹非光滑表面与土壤颗粒的实际接触面积小于光滑表面与土壤颗粒接触的实际面积。
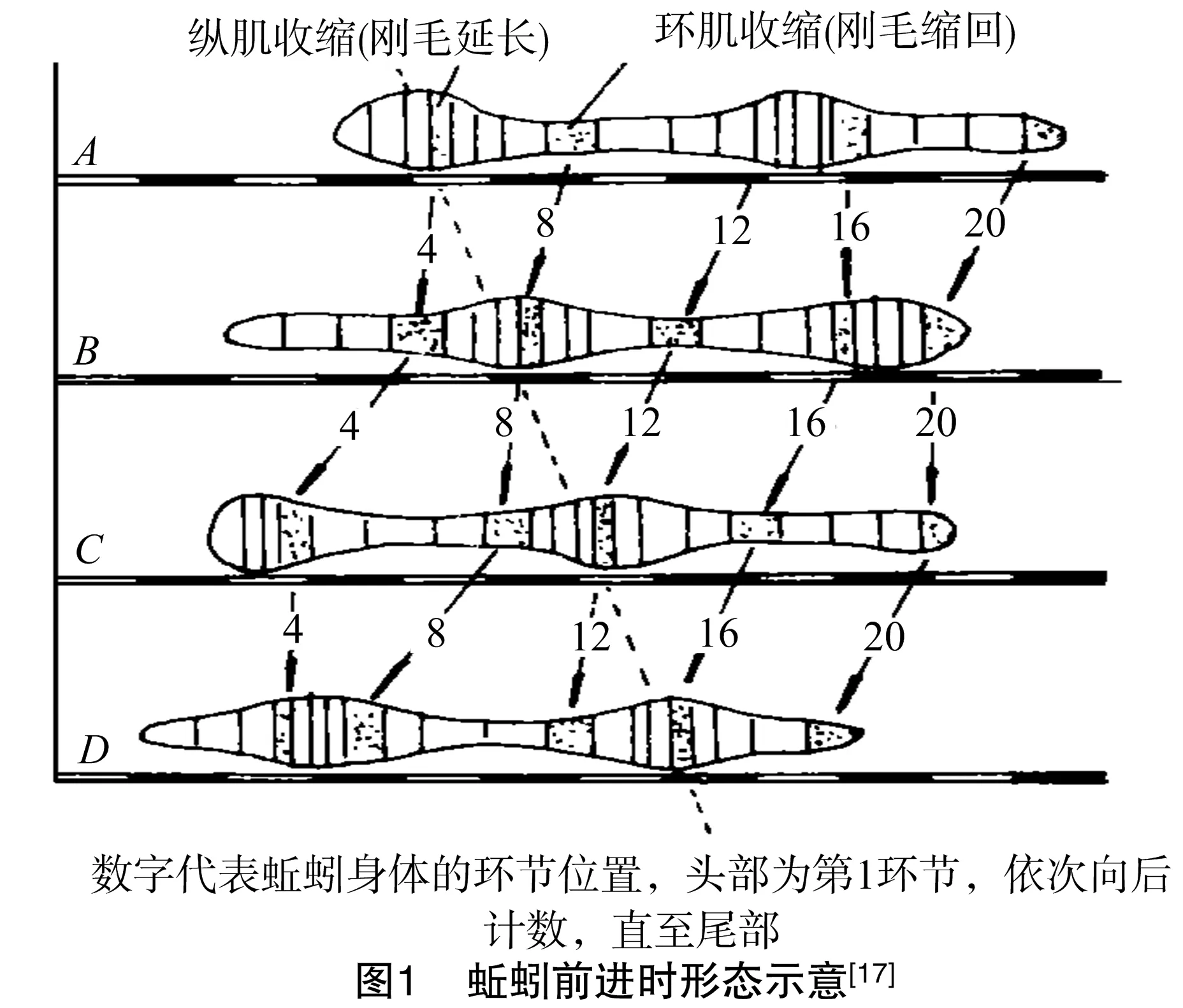
如图1[17]所示,蚯蚓在前进过程中,前端收缩,身体环节变得细长,然后后端向前推进,以波形状态由前及后蠕动,使身体不断地向前前进;蠕动至末端时,另一新的波形从头至尾开始,循环往复,蚯蚓不断蠕动前进[15,18]。
蚯蚓在土壤中前进的过程中,身体上下斜向穿行,前进路线呈波纹形状,并且蚯蚓身体的各个环节交替收缩和舒张,蠕动过程呈波纹形状。土壤具有弹塑力学性质[19-20],蚯蚓波形穿行和身体呈波纹形蠕动,增加了土壤的微振动频率和微振动幅度,使土壤的极限弹塑变形力变小,进而减小土块对蚯蚓的摩擦力。
1.2 波纹形深松铲柄设计
深松装置在深松作业过程中,触土曲面承担松碎土垡的作用,在深松铲柄触土曲面处应力集中,阻力最大。将蚯蚓在土壤中穿行时身体表面所表现的波纹特性应用到深松铲柄的触土曲面上,与传统的深松作业相比,具有波纹形状的深松铲在作业时,土块在深松铲和前方土垡的作用下更易碎裂成较小的土块。较小的土块在波纹形状表面上运动时,不断地产生微振,其振动幅度和频率大于土块在深松铲光滑触土曲面上运动时的振动幅度和频率,易碎裂成更小的土块;另外,土块在深松铲的触土曲面上运动时,二者之间的滑动摩擦变为滚动摩擦,实际接触时间减少,接触面积减小,阻力减小,土壤的蓬松度、透气性和透水性提高,深松作业质量得到改善。
1.3 波纹波形的设计
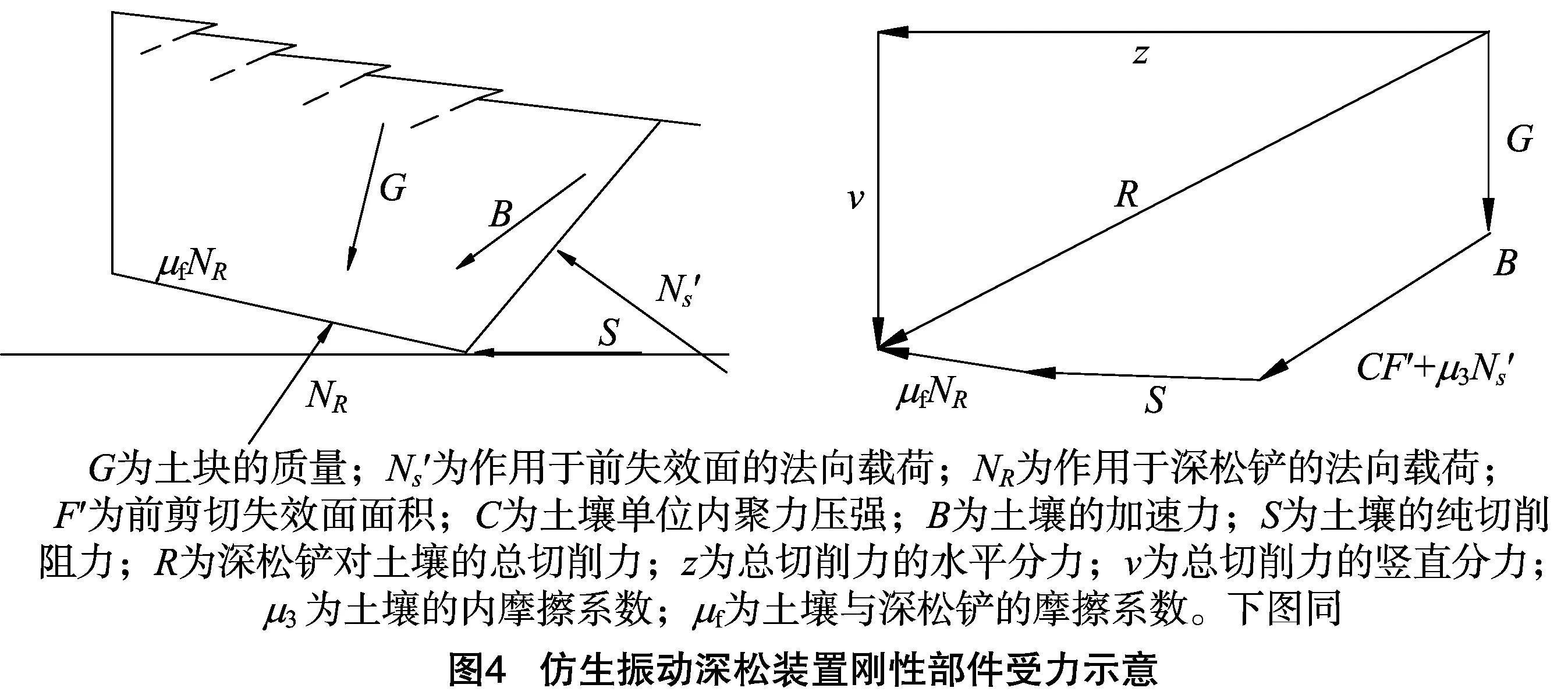
波纹的波形在深松铲装置上主要有平行于地面的横向波纹(图2)和垂直于地面的纵向波纹(图3)等2种。结合深松铲的形状和工作状态,当单个波纹形状的尺寸相同,触土曲面上波纹形状为横向波纹时,波纹数量更多。
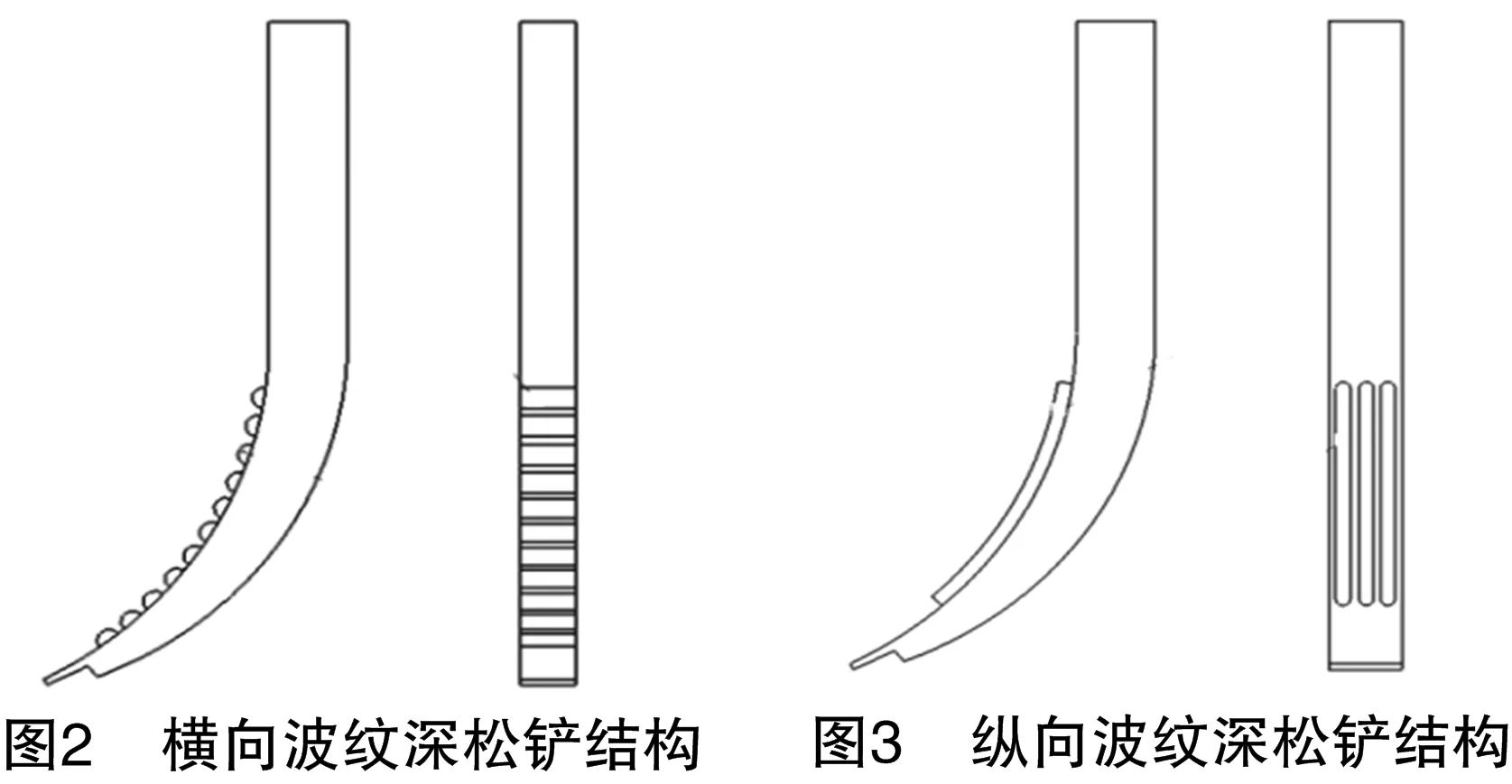
1.3.1 横向波纹 深松铲柄触土曲面上的波纹形状为横向时,在作业过程中,与触土曲面接触的土块在深松铲和前方未碎裂的土垡作用下,沿深松铲柄触土曲面有1个向上的滑切作用力,相对深松铲柄向后上方移动;在深松作业过程中,由于深松铲柄触土曲面横向波纹的不光滑性,土块不断受到来自触土曲面波纹不同方向、不同大小力的作用,土块的振动幅度和振动频率增大,大土块更易碎裂成较小的土块,较小的土块碎裂成更小的土块,土块与深松铲柄触土曲面的实际接触面积减小,深松装置受到的阻力减小。
1.3.2 纵向波纹 深松铲柄触土曲面上的波纹形状为纵向波纹时,在作业过程中,土块同样受到来自触土曲面不同方向、不同大小的力。触土曲面上的波纹为纵向时,土块受到的沿深松铲柄触土曲面向上的滑切力减小,向深松铲柄两侧的力增大。波纹的波谷较长,土块由于受到深松铲柄和前方土垡的挤压,易被挤压在波形低凹处,使深松铲触土曲面的波形作用减弱。与触土曲面为纵向波形的深松铲相比,当单个波纹形状相同,波纹方向为横向时,波纹数量更多,土块在深松铲柄触土曲面上滚动的时间更长,受到的振动时间也更长,振动频率更大,土块与深松铲柄触土曲面的接触面积更小。
结合蚯蚓在土壤中穿行过程中的身体状态可知,深松铲触土曲面为横向波纹时更符合蚯蚓波形碎土特性和减黏降阻特性。
2 振动波纹形深松铲
为兼顾传统振动深松和仿生深松的优点,又解决两者的缺陷(传统振动深松铲的阻力较大,能耗较高;仿生深松铲铲尖易产生切削核),在设计波纹形仿生深松铲的基础上,对深松工作部件施加一定的周期振动。
2.1 振动深松
深松铲在作业过程中,其前方的土壤在切削力作用下会产生裂纹,但裂纹不明显,需要较大的切削力才能完成对土壤的破坏,此时深松铲受到土壤对其两侧的摩擦力和黏附力较大。当对深松铲加以振动时,其前方的土壤在振动作用下裂纹更多,土块沿着裂纹碎裂时需要较小的切削力,且土壤在深松铲两侧附着量减少,从而减小深松铲受到的摩擦力和附着力。深松铲不振动时,由于自身的磨损性和土壤的黏附性,在深松铲铲尖的刃口常会形成切削核(黏附在铲尖上的土块),从而增大深松铲的工作阻力;深松铲振动时,会对土壤产生连续的脉冲力,使切削核难以形成和扩大,从而降低深松铲的工作阻力[21-23]。
2.2 仿生振动深松
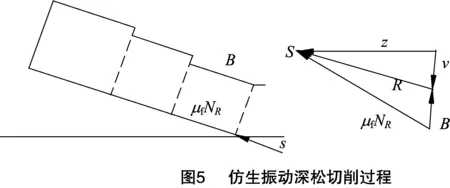
土壤具有弹塑力学性质[19-20],当深松装置为刚性部件,没有周期振动时,深松部件的切土、破碎和提升土壤过程是同时进行的。土壤在切削力的作用下,沿剪切面断裂、提升,此时作用在土壤上的力有摩擦力、剪切力、提升力和作用于深松铲刃口上的切削力,这些力的分力和构成工作部件的牵引阻力如图4所示。
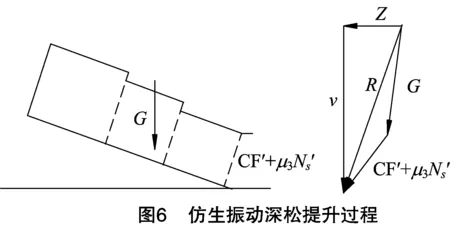
对深松装置施加一定的周期振动时,深松部件的工作过程被分为不同阶段(图5、图6)。在振动作用下,深松部件会产生比较有利的切削条件和对土壤有利的受力状态,其中一部分阻力被深松部件的振动作用所承担,牵引阻力减小;深松铲切开土壤后,在垂直加速度的作用下,处于深松铲上方的土壤向上加速运动使土壤从部件上浮起。这样作用于部件上的力几乎与运动方向垂直,产生的牵引阻力合力减小。
在传统深松铲的作用下,深松铲上方的土壤紧贴在深松铲曲面上,在前方土垡的挤压作用下,对深松铲产生较大阻力,并且土壤在深松作用下碎裂成大土块之后,不易二次碎裂形成较小土块,降低了深松的疏松作用。在波纹深松铲作用下,施加一定的振动周期,曲面上方的土壤会因受到振动作用而减小对深松铲的牵引阻力;另外,当土壤离开曲面又落回到深松铲曲面上时,将受到波纹曲面的作用,在不同部位受到不同的力,从而增加土壤的振动次数,使已碎裂的土块易发生二次碎裂,强化深松效果。
3 结论
结合蚯蚓的波纹体表和在土壤中穿行的状态,波纹形深松铲可以在土块于深松铲的触土曲面上运动时,使土块和触土曲面之间的滑动摩擦变为滚动摩擦,从而减少实际接触时间、接触面积和阻力,提高土壤的蓬松度、透气性和透水性,改善深松作业质量。
对波纹形深松铲施以一定的振动周期,不仅可以达到减小牵引阻力、破坏大块土壤的作用,还可以强化波纹形深松铲的深松效果,提高深松质量。但是波纹的形状、波纹之间的距离、振动周期的大小等对深松铲工作时受到阻力的影响,还须在今后试验中验证。
[1]Li B,Liu F Y,Mu J Y,et al. Distinct element method analysis and field experiment of soil resistance applied on the subsoiler[J]. International Journal of Agricultural & Biological Engineering,2014,7(1):54-59.
[2]朱瑞祥,张军昌,薛少平,等. 保护性耕作条件下的深松技术试验[J]. 农业工程学报,2009,25(6):145-147.
[3]Li M,Chen D H,Zhang S J,et al. Biomimeitc design of a stubble-cutting disc using finite element analysis[J]. Journal of Bionic Engineering,2013,10(1):118-127.
[4]李 博,刘凡一,陈 军,等. 深松铲耕作阻力影响因素的离散元法仿真分析[J]. 农机化研究,2015(2):71-74.
[5]Li B,Liu F Y,Xia R,et al. Distinct element method analysis and experiment of a biomimetic subsoiler[J]. International Agricultural Engineering Journal,2015,3(1):47-54.
[6]张海林,高旺盛,陈 阜,等. 保护性耕作研究现状、发展趋势及对策[J]. 中国农业大学学报,2005,10(1):16-20.
[7]白景峰,李 博,吕秀婷,等. 基于狗獾爪趾的仿生深松铲振动减阻研究[J]. 农机化研究,2016,38(5):224-227.
[8]Page K,Dang Y,Dalal R. Impacts of conservation tillage on soil quality,including soil-borne crop diseases,with a focus on semi-arid grain cropping systems[J]. Australasian Plant Pathology,2013,42(3):363-377.
[9]李 博,陈 军,黄玉祥. 机械与土壤相互作用的离散元仿真研究进展[J]. 农机化研究,2015(1):217-222.
[10]佟 金,张金波,马云海,等. 指数函数曲线型仿生减阻深松铲柄:CN102265727A[P]. 2011-12-07.
[11]张 强,张 璐,刘宪军,等. 基于有限元法的仿生钩形深松铲耕作阻力[J]. 吉林大学学报(工学版),2012(增刊1):117-121.
[12]张 强,张 璐,于海业,等. 复合形态深松铲耕作阻力有限元分析与试验[J]. 农业机械学报,2012,43(8):61-65.
[13]龚皓晖,王 霜. 仿生深松铲结构设计与有限元分析[J]. 农机化研究,2013(7):53-57.
[14]张金波,佟 金,马云海. 仿生减阻深松铲设计与试验[J]. 农业机械学报,2014,45(4):141-145.
[15]张金波. 深松铲减阻耐磨仿生理论与技术[D]. 长春:吉林大学,2014.
[16]刘国敏,李建桥,邹 猛,等. 蚯蚓非光滑体表形貌与降阻特性[J]. 农业工程学报,2008,24(12):62-65.
[17]任露泉,王云鹏,李建桥,等. 典型生物柔性非光滑体表的防粘研究[J]. 农业工程学报,1996,12(4):35-40.
[18]刘国敏,邹 猛,徐 涛,等. 波纹表面接触土壤颗粒动态响应仿真分析[J]. 农业机械学报,2013,44(1):85-89.
[19]Li J Q,Kou B X,Liu G M,et al. Resistance reduction by bionic coupling of the earthworm lubrication function[J]. Science ChinaTechnological Sciences,2010,53(11):2989-2995.
[20]Spektor M. Minimization of the energy consumption of soil deformation[J]. Journal of Terramechanics,1980,17(2):63-77.
[21]初旭宏. 振动深松机关键部件的研究[C]//纪念中国农业工程学会成立三十周年暨中国农业工程学会2009年学术年会(CSAE2009)论文集.太谷,2009.
[22]马晓君,左景涛,张 则. 低频振动切削过程的理论研究[J]. 佳木斯大学学报(自然科学版),2005,23(3):468-472,504.
[23]Radite P A S,Hermawan W,Rizkianda A B,et al. Experimental investigation on the application of vibration to reduce draft requirement of subsoiler[J]. International Agricultural Engineering Journal,2010,19(1):31-38..
