基于改进型KNN算法和Android平台的室内定位技术研究
2018-03-24李昂肖甫李雷
李昂 肖甫 李雷
摘 要:通过分析基于WiFi定位的传统位置指纹算法的不足之处,文中提出了一种旨在提高精度并减小计算复杂度的改进型KNN算法。通过Android平台对该算法进行实现和测试,分析比较K的取值、AP的位置及数量等因素对定位精度的影响。测试结果表明,该算法不但能够保证位置指纹室内定位的精度,还能有效减小计算复杂度,具有一定的可行性。
关键词:精度;计算复杂度;改进型KNN算法;Android平台
中图分类号:TP301;TN92 文献标识码:A 文章编号:2095-1302(2018)03-00-05
0 引 言
伴随着互联网应用的快速发展,人们在室内停留的时间越来越多,室内位置信息对人们的日常生活愈加重要,因此人们对室内定位有着愈发强烈的需求[1-3]。由于利用GPS和AGPS这两种定位方式进行室内定位时,信号会受到各种障碍物的遮挡[4],因此亟待出现新型的室内定位方式。
随着无线局域网络(Wireless Local Area Networks,WLAN)遍布各地,智能手机和平板电脑等个人电子设备发展迅速,这些设备几乎都使用WiFi连接网络,用户可使用WiFi進行定位[5-7]。iOS,Android和WP是目前三大主流移动操作系统。其中,Android系统所占的市场份额日益增大,因此完全可以选择Android系统作为载体,设计基于WiFi的室内定位系统[8-11]。本文基于Android平台设计了一种基于改进的位置指纹算法,首先收集采样点的信号强度值信息,并将其保存到数据库中,然后将定位时的数据和数据库相互对比进行估算,得到所要定位的坐标信息。
1 基于WiFi的室内定位技术简介
虽然目前实现WiFi室内定位的方法有很多,但主要使用基于测距的定位方法。其中基于RSSI的定位方法最受关注[12-16]。基于RSSI的定位算法流程如图1所示。
2 传统位置指纹定位技术
目前,在研究基于WiFi的室内定位时,位置指纹定位技术使用较多[17-21],受到了广泛关注。
2.1 技术原理
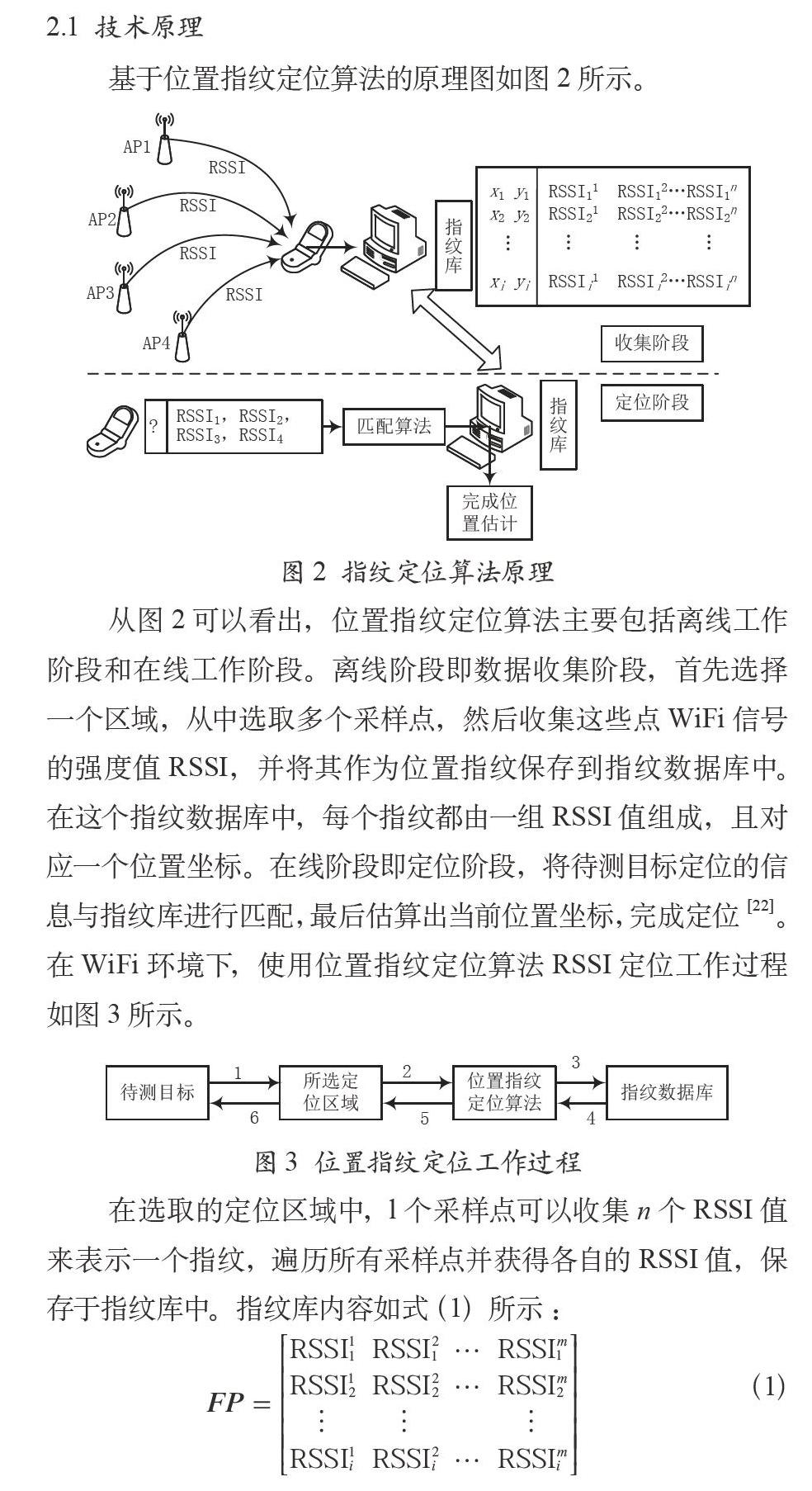
基于位置指纹定位算法的原理图如图2所示。
从图2可以看出,位置指纹定位算法主要包括离线工作阶段和在线工作阶段。离线阶段即数据收集阶段,首先选择一个区域,从中选取多个采样点,然后收集这些点WiFi信号的强度值RSSI,并将其作为位置指纹保存到指纹数据库中。在这个指纹数据库中,每个指纹都由一组RSSI值组成,且对应一个位置坐标。在线阶段即定位阶段,将待测目标定位的信息与指纹库进行匹配,最后估算出当前位置坐标,完成定位[22]。在WiFi环境下,使用位置指纹定位算法RSSI定位工作过程如图3所示。
在选取的定位区域中,l个采样点可以收集n个RSSI值来表示一个指纹,遍历所有采样点并获得各自的RSSI值,保存于指纹库中。指纹库内容如式(1)所示:
其中:RSSIji表示在第i个采样点所测的WiFi信号的第j个RSSI值;FPi=(RSSI1i,RSSI2i,…,RSSImi)表示任意一个位置的指纹数据,同时该指纹数据也可用坐标(x,y)表示。因此,指纹数据与坐标相互对应,其坐标如式(2)所示:
位置指纹数据库由式(1)和式(2)共同组成。
除了在离线阶段创建一个比较准确的指纹数据库,在线阶段指纹库的匹配算法也十分重要[23]。常用的匹配算法有最近邻法、K近邻法和加权K近邻法。
(1)最近邻算法(NN)
最近邻算法是一种比较常用的匹配算法,当待测目标进入定位所选区域时,可获得一个相关的指纹信息lf=(RSSI1,RSSI2,…,RSSIn),然后将这个指纹信息与指纹数据库中的信息相匹配,再算出它们之间的距离,其距离如式(3)所示[24,25],其中距离最小也就是相似度最大指纹信息min(d(lf,FPi)),即待测目标的位置。
式中:RSSIj和RSSIji分别为定位点和指纹点的强度值;n是WiFi信号的个数。
最近邻算法操作十分简单,且容易实现,但是其可选择的参考点较为单一,定位时容易产生误差,精度不高。
(2)K近邻算法(KNN)
相较于最近邻算法,K近邻算法可选择的参考点有所增多。匹配待测目标的指纹信息,并找出与指纹数据库中最近邻的K(K>2)个指纹信息,通过计算坐标的平均值就可以估算出待测目标的位置,其位置如式(4)所示[26,27]:
式中:(xi,yi)是被选择的第i个指纹数据库中的信息所对应的坐标。
(3)加权K 近邻法(WKNN)
加权K近邻法是对K近邻法的一种改进。K近邻法选取的K个最小距离对最后的定位结果贡献相同,取平均值,但距离越小对定位结果坐标的贡献越大。因此,对所取的K个最小距离进行权值分配,距离越小,权值越大。K个权值ωk之和为1。ωk可自行设定,也可由式(5)计算得出[28,29]:
2.2 技术性能与存在的问题
当前的位置指纹算法虽然可以实现室内定位,但该算法依然存在一些问题,主要体现在以下方面:
(1)算法模型过于简单,仅能满足较为简单的室内环境的定位要求。当室内环境较为复杂,如家具等陈设较多、有移动物体或人走动时,该传统算法的定位精度无法满足要求。
(2)该算法在线工作阶段的运算量较大,尤其当AP个数较多或K取值较大时,运算量急剧增长,无疑增加了该算法的运行成本和复杂度。
3 一种改进的KNN算法
考虑到上述传统位置指纹算法存在的问题,对传统位置指纹算法作如下改进:
(1)面对更复杂的室内环境,应当建立更加符合实际的模型。传统位置指纹算法的模型主要采用MK模型,如式(6)所示:
L(d)=L+10nlgd+NωLω+NfLf (6)
其中:L表示距离发射端1 m处的传播损耗;n是路径传播损耗系数;d是发射端到接收端的距离;Nω和Nf分别是传播路径上穿过的墙壁和地板个数;Lω和Lf 分别是墙壁和地板的损耗系数。可见,传统模型对于室内环境只考虑了墙壁和地板,而对于更复杂的情况没有考虑。
因此提出一种新的更符合实际的模型,充分考虑了除墙壁和地板外包括人在内的其他障碍物,如式(7)所示:
式(7)与式(6)的不同之处在于最后一项,假设共有m种障碍物,Pi表示遇到第i种障碍物的概率,可以通过最小二乘法计算得出;Ni表示穿过第i种障碍物的个数,Li表示第i种障碍物的损耗系数。
(2)针对运算量较大的问题,提出一种减少运算复杂度的新方法。经试验证明,在RSSI算法中,信号强度的衰减速度与传输距离成指数关系,即距离小时衰减快,距离大时衰减慢。尤其当到达一定距离后,其衰减速度趋于平缓,即信号强度变化较小。因此,如果按照传统KNN算法让所有的RSSI值都参与到计算中,势必会造成较大的冗余开销。
基于上述现象,需确定一个距离阈值,大于该距離时RSSI变化较小,可以舍弃,而小于该距离时则为有效点,应予以采纳。由此可较大程度地减小运算量。在实际仿真中发现,该门限距离取8 m和10 m时定位精度差距不大,但运算量减小了约50%。
对于运算和精度有同样重要影响的还有AP的个数与算法中K的取值。仿真试验表明,AP的个数对于精度和运算量影响巨大。当AP数量增加且分布较均匀时,定位的精度较高,但同时运算量较大。而K的取值对于精度和运算量的影响则呈现出不同的规律,并非K的取值越大精度越高。因此,AP的个数与K的取值应当在精度和运算量之间权衡。
综合上述两个方面的改进,本文提出了一种用于室内定位的改进KNN算法。
4 改进KNN算法的Android实现与测试
本文所设计的定位系统包括收集部分和定位部分,客户端为Android移动端APP,在运行时用户首先通过收集模块将采样点信号的信息提交给数据库,然后定位时将定位信息与数据库进行匹配,即可估算出位置。这款软件的理论设计内容如图4所示。
4.1 实现
(1)收集模块设计
当位置指纹定位算法处于离线收集阶段时,首先需要选取合适的区域进行信息收集,理论上需要在选取的区域内放置4个无线路由器,其WiFi信号的强度值RSSI比较稳定,测试结果误差较小,但本文的收集模块选用4个随机WiFi信号以及各自对应的强度值作为参考点。然后在区域内选取若干个采样点,其位置已知,将检测到的每个采样点的4种信号强度值均放入创建的指纹数据库中,此时指纹库中的每个采样点将由一系列RSSI值组成[30]。如果此时的室内环境发生变化,那么RSSI值也将发生变化且定位出现误差[31]。收集模块流程如图5所示。
(2)定位模块设计
当位置指纹定位算法处于在线定位阶段时,首先获取待测目标位置的RSSI值,然后使用本文提出的改进KNN算法即可估算出待测目标的位置。定位模块流程如图6所示。
(3)指纹数据库设计
考虑到数据量并不庞大,因此选择SQLite数据库。创建的数据库如图7所示。
4.2 测试方案与结果分析
(1)测试方案
在本次测试中选取了C104,C108,C112三间教室和大厅作为测试场地。
在这三间教室中,C112面积最大,约10 m×10 m;C104与C108面积较小且相近,约7 m×7 m;而大厅面积与C112相近,但较为空旷,如图8、图9所示。计划每间教室分别选取4个角落位置作为采样点,三间教室共12个采样点;而大厅内计划选取6个采样点,如图10所示。本测试主要检测在面积大小、AP个数、K取值和室内环境均不相同的条件下,所提出的改进KNN算法的性能。
(2)测试结果
教室C104,C108和C112测试结果见表1所列。
从表1可知,由教室C104和C108所测得的4组数据的误差系数明显小于C112的数据。
教室C108内有人时的测试结果见表2所列。
由表2可知,相较于无干扰时的结果,有干扰时得出的定位误差系数大,即误差较大。大厅测试结果见表3所列。
由表3可知,相较于环境复杂的教室,在较为空旷的大厅所获得的误差系数较小,较准确。
(3)测试结果分析
a.同一间教室有无干扰时的结果对比分析
根据在教室C108测得的两组数据,对采样点的真实位置和定位结果进行对比分析,如图11所示。
在图11中,实心圆表示采样点的真实位置,空心圆表示教室内无干扰时定位的结果,空心三角形表示教室内有干扰时定位的结果。真实位置和定位结果两点相连,其连线直观地显示了两点间的差距,这种差距即定位误差。相较于教室内有干扰时的定位结果,无干扰时产生的误差明显较小。
b.大小相近的教室与空旷空间的结果对比分析
在教室测试的数据里随机抽取6组并与在大厅测试的数据进行对比分析,如图12所示。
在图12中,折线1表示教室内采样点的测试误差系数,折线2表示大厅内采样点的测试误差系数。可以很明显地看出,折线1的误差系数整体比折线2大,因此,在大厅内产生的误差较小。
5 结 语
本文针对基于WiFi的室内定位常用的传统KNN算法中存在的问题,提出了一种改进型KNN算法,在面对更复杂的室内环境时可以保证精度,并有效降低运算复杂度。基于Android平台对这一改进算法进行了实现和测试,测试结果表明,该算法达到了预期效果,具有一定的可行性。
参考文献
[1] 姜乐水.浅谈无线局域网(WLAN)技术[J].信息技术与信息化,2012(5):64-67.
[2] 潘焱,田华,魏安全.无线通信系统与技术[M].北京:人民邮电出版社,2011:147-148.
[3] 张瑞生,刘晓辉.无线局域网搭建与管理[M].电北京:子工业出版社,2011:14.
[4] 刘智敏,阳凡林,独知行.卫星定位原理及应用的教学改革与实践[J].测绘工程,2010,19(3):77-80.
[5] 袁晶.大规模轨迹数据的检索、挖掘和应用[D].合肥:中国科学技术大学,2012.
[6] 王建平,余根坚,李晓颖,等.无线网络技术[M].北京:清华大学出版社,2013:180-181.
[7] 黎连业,王安,李龙.无线网络与应用技术[M].北京:清华大学出版社,2013:104-105.
[8] 姜莉.基于WiFi室内定位关键技术的研究[D]. 大连:大连理工大学,2010.
[9] 陈典全.LBS中基于轨迹的用户行为特征分析[J].全球定位系统,2011,36(6):58-61.
[10] 罗纪清,万恩秀.超声引导下不同定位方法在体外碎石中的应用[J].检验医学与临床,2017,14(2):261-263.
[11] 宋伟清,周廉,白涛,等.基于逐元暗电流抑制的红外线探测器读出电路研究[J].红外,2015,36(4):13-19.
[12] 熊永平,孙利民,牛建伟,等.机会网络[J].软件学报,2009,20(1):124-137.
[13] 龚世雄.浅析RFID技术及其应用[J].中国科技信息,2013(3):52-53.
[14] 高仁强,张晓盼,熊艳,等.模糊数学的WiFi室内定位算法[J].测绘科学,2016,41(10):142-148.
[15] 卢恒惠,刘兴川,张超,等.基于三角形与位置指纹识别算法的WiFi定位比较[J].移动通信,2010,34(10):72-76.
[16] 李扬.WiFi技术原理及应用研究[J].科技信息,2010(6):241.
[17] 贺远华,黎洪生.距离几何的TOA无线定位算法[J].计算机工程与应用,2010,46(12):112-114.
[18] 鲁丹宇,高春利,刘浩然.基于无线时钟同步的超宽带TDOA定位系统设计[J].节能, 2017,36(1):66-68.
[19] S TOMIC,M BEKO, D RUI,et al. Distributed RSS-AoA based localization with unknown transmit powers[J].IEEE wireless communication letters, 2016,5(4):1.
[20] 薛卫星,邱卫宁,花向红,等.RSSI信号特征值对WiFi室内定位精度的影响分析[J].测绘地理信息,2016,41(4):23-26.
[21] 孙学康,刘勇.无线传输与接入技术[M].北京 :人民邮电出版社,2010:298-301.
[22] 赵小东.Android平台下基于无线信号强度的定位系统的实现[D]. 哈尔滨:哈尔滨工业大学,2011.
[23] 王淑婷.基于位置指纹的WiFi定位算法研究[D].长春 :吉林大学,2015.
[24] CHEN L, L? M, QIAN Y. A personal route prediction system based on trajectory data mining[J].Information sciences an international journal. 2011,181(7):1264-1284.
[25] 王阳,叶芝慧,冯奇,等. 基于Android的室内WiFi定位系统设计与实现[J].电子测量技术,2016,39(9):16-19.
[26] 王考杰,郑雪峰,宋一丁,等.面向轨迹数据流的KNN近似查询[J].计算机工程,2011,37(16):17-20.
[27] 李伟.Android中人为改变程序生命周期的研究[J].计算机应用与软件,2013,30(9):205-207.
[28] 羅利.基于Android的WiFi室内定位技术研究[D].成都:西南交通大学,2014.
[29] 卞国龙,黄海松,葛至峥,等.无线传感器网络节点定位技术的优化[J].激光杂志,2017,38(3):69-74.
[30] 张建平.基于WiFi的室内定位系统设计和算法研究[J].自动化技术与应用,2016,35(12):53-56.
[31] MAHAJAN R,BALASUBRAMANIAN A,VENKATARAMANI A,et al. Interactive WiFi connectivity for moving vehicles[J].Proceeding of sigcomn,2013, 38(4):427-438.
