自动泊车模拟系统设计
2018-03-23李志明马国霞
李志明 马国霞
摘 要本设计以小车模型为车体,硬件是以MSP430F169单片机为主控芯片,配合寻光比较电路、L298N电机驱动模块、光电传感器、无线收发模块、LCD12864液晶显示器等构成,并通过相应的算法编程实现小车的自动泊车、自动计时计费、显示碰撞次数等功能;实验表明,整个自动泊车系统结构简单,使用方便,功能齐全,准确度高,验证的系统地可行性。
【关键词】自动泊车 单片机 自动计费
随着汽车的普及,在城市里停车难的问题越来越突出。尤其是新手或一些女司机停车难的问题更为突出。为此,全世界厂家都在研发自动泊车系统,使汽车进入停车场后可以在无人干預的情况下,按照指令停在指定停车位。
1 系统组成
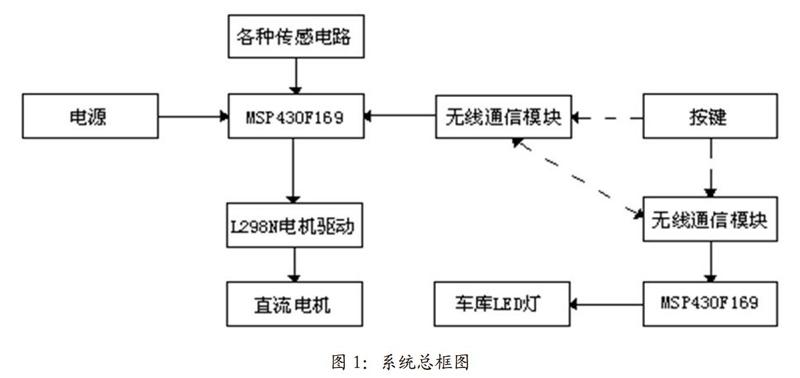
自动泊车系统主要由三部分组成,包括车体部分、停车场部分和无线通讯部分。车体部分接收无线收发模块向车体发出的控制命令,小车开始自动泊车。小车进入停车场后开始计时,当停好车后,向车场部分发送停止指令,车场部分点亮所在车位灯。停车一定时间后,自动行驶出停车场,停止计时并显示本次停车金额,同时关闭停车位LED灯。
整个系统框架如图1所示。
2 系统介绍
车体部分主要由MSP430F169单片机、传感器信号采集模块、L298N电机驱动模块、无线通信模块、12864液晶显示屏等部分组成。这里单片机根据传感器的信息,实时控制电机的正转,反转,以实现小车前进,后退和转弯功能。系统单片机产生一路可调PWM占空比的电压信号来驱动电机,实现小车进退自如,转弯灵活。
车体传感器,主要有LM393寻光传感器,光电码盘传感器和碰撞传感器。光电码盘式传感器是用光电方法把被测角位移转换成以数字代码形式表示的电信号的转换部件。小车首先根据预先设置好的路线进行停车,在行驶过程通过监控码盘转动时单片机采集到的脉冲个数能测算出小车行走的距离,在转弯处,同样根据脉冲个数能估算小车转弯角度。实验表明,一旦电压固定,一个光电码盘的脉冲对应距离和角度都是定值。这样能很好地控制小车路线。
LM393寻光传感器主要用于判断小车进入停车场和进入停车位用。传感器安装在小车前端正对地面。小车一旦经过地面上的黑线,由于瞬时没有光反射,传感器会产生一个高脉冲,单片机捕获到该第一脉冲后知道,系统开始运行,停车计时开始,捕获到第二个脉冲后,停车位计时开始;捕获到第三个脉冲后,停车位计时结束;捕获到第四个脉冲后,停车退出,计时结束;
为了在行驶过程中更好地控制小车行驶,在小车周围安装了6个光电传感器,调节其灵敏度,能做到当靠近墙体5mm处,传感器产生一个高脉冲,这时,单片机系统根据当前位置和需要进入的车位进行分析计算出规避该碰撞的最佳路线。这6个传感器使用单片机系统的端口P1中断,在行驶过程随时微调行驶线路。车体部分到此基本完成行驶功能。
系统程序在计算行驶路线过程中,随时要监控当前状态。因此使用了很多中断。其中,6个光电传感器和码盘使用了端口中断,保证实时响应当前变化;显示、进场计时,停车计时,PWM中断,都使用同一个定时器中断,这样确保不存在中断优先的问题,同时,最大限度合理利用资源。
停车场部分,主要是接收无线遥控器发送的按键信息,点亮对应的车位LED灯。当小车退出车位时熄灭车位LED灯。无线模块采用了315M无线收发模块,传输距离较远,发射功率较大,满足应用。
3 应用测试
实际测试中,整个系统基本到达预期目标,能准确驶入指定位置,获得江苏省电子竞赛二等奖,只是碰撞次数的计算略有出入。如果系统改为加速度传感器应该能很好地解决计算碰撞次数的问题。
参考文献
[1]沈建华,杨艳琴.MSP430系列16位超低功耗单片机原理与实践[M].北京:北京航空航天大学出版社,2008.
[2]禄盛.自动泊车系统模型研究与实车验证[J].重庆邮电大学学报(自然科学版),2014.
[3]周泓.自动泊车系统中核心算法的研究[J].电路与系统学报,2012.
作者单位
1.南京铁道职业技术学院 江苏省南京市 210031
2.广州船舶及海洋工程设计研究院 广东省广州市 510250