机载LiDAR多脉冲模式在山区数据采集中的应用
2018-03-23李腾,施昆,张宁
李 腾,施 昆,张 宁
(昆明理工大学 国土资源工程学院,云南 昆明 650093)
0 引言
机载 Lidar(Light Detection and ranging,LiDAR)[1,2]是激光探测及测距系统的简称,是一种快速获取地面及地物高精度三维信息的一项技术。基于机载激光雷达技术及其原理、数据采集、数据处理,国内外学者对其做了大量的研究工作[3-5]。它是集三维激光扫描技术、高动态载体姿态测定技术和高精度的动态GPS差分技术与一体的探测技术。它相较于传统遥感技术具有自动化程度高、受天气影响相对较小、速度快效率高、能够轻松穿透植被的叶冠得到地面点云数据等技术特点[6],因此可以快速的获取地物的数字表面模型,生成高分辨率数字高程模型[7],在三维数据城市建设、地形测绘、森林调查、环境监测等方面具有独特的优势,是传统摄影测量方法无法取代的[8],因此,引起了测绘行业的浓厚兴趣。
单脉冲作业模式在地形起伏不大的地区能够发挥较好的效果,在点云密度要求不高的山区也能发挥一定作用。当点云密度要求每平方米大于1个点时,特别是在落差较大的山区会受到很大的限制,作业效率偏低[9]。多脉冲作业模式的兴起能够很好的提高飞机的飞行高度降低地形影响,增加点云密度及作业效率。
1 机载激光多脉冲技术原理及优势
1.1 机载激光多脉冲技术的介绍
一般的机载激光雷达系统采用的是单脉冲探测模式,即由激光发射系统发送一个激光脉冲信号,经目标物反射后被接收系统收集,根据激光发射至接收的时间间隔t精确计算并确定目标的距离[10-11]。但是单脉冲工作模式激光的发射只能在前一束激光接收以后后一束激光才能被触发,而且其发射一个脉冲并要求在单位时间 T0(1/f)内接收其回波信号,否则视为信号丢失[12]。
多脉冲探测技术通过允许机载激光雷达系统在接收前一束脉冲信号之前发射第二束激光脉冲信号,并且再接收时不会将两束激光回拨信号混淆[13]。多脉冲多频率模式则是在多脉冲的基础上对不同的视场角采用不同的采样频率。设视场角 θ,飞机飞行高度H,激光测距值D。D=H/COS(θ)对于大视场角的设备来说随着视场角的增大测距值会随之增大。为满足不同的测距需求将分为三个不同的角度19度,28度,35度分别采用不同的发射频率。
1.2 机载LiDAR多脉冲作业的优势
(1)在相同的地形及密度条件下多脉冲模式的飞行高度可以比单脉冲模式下的飞行高度提高1-2倍。
(2)突破了传统单脉冲激光雷达技术的限制,多脉冲模式可以实现跟高的脉冲频率,在同一高度获取所需的点密度,能够达到传统覆盖率的两倍。
(3)由于飞机能飞得更高,地形高度变化对航带宽的影响会变小,因此需要较少的侧重叠来保证完整的区域覆盖。
(4)通常较高的飞行高度会湍流相对较少,可以更舒适的飞行和减小飞行人员疲劳度。考虑到飞行人员在大区域任务的高“任务周期”,这一点尤其重要。每天都有可能进行多次长时间(长达 7小时)的任务[14]。
机载激光雷达多脉冲探测技术最早由加拿大的Optech公司开发,目前,Leica ALS60、RieglCP680以及中国的一些公司也已经具备该技术。
2 工程应用
2.1 项目概述
本项目对贵州某地区的地形数据采集工作,测区地形包括山区、平地、丘陵。大部分地区为山区,山区部分地形起伏较大,交通条件一般。根据技术要求该摄区采用机载激光雷达技术,获取相应区域点云数据,点云密度大于等于1点/平方米,高程精度优于 0.3米。同时获取辅助影像数据,影像分辨率优于0.3 m。
2.2 航摄技术参数设计
2.2.1 航高设计
综合考虑点云密度、影像分辨率、精度要求等,摄区采用lidar进行数据获取,点云密度大于等于1点/平方米,高程精度优于0.3米,同时获取相应影像,影像分辨率优于0.3 m,参照以上要求,综合考虑LC-3500型号机载LiDAR设备及配套数码相机性能及摄区基准面高度,且有效避开航空扫描盲区。摄区拟使用LC-3500型号机载LiDAR设备获取,设计航线行相对高度为1400米。
相对航高由如下公式计算:

航高≤2214.7 m
其中h代表相对航高;f(50.2 mm)代表镜头主距;a(6.8 um)代表像元尺寸;GSD(0.3)代表地面分辨率[15]。
2.2.2 点云密度设计
随着技术的提高,对作业精度及密度的要求也不断增加,为满足特定的工作需求,设计飞行前要计算点云密度是否满足项目要求:
设航线方向的点云间距为D1,单位m,

Fscan是激光扫描频率,V是飞行器飞行速度,单位米/秒,R是电机转速,转速单位为转/秒。
垂直于前进方向的扫描线上点云间距 D2与扫描点分布有关,若扫描点间距相等,则D2可以表示为:
所以:

SW 是指地面扫描带宽飞行速度、H是飞机飞行相对高度、FOV指扫描视场角、R是电机转速。
飞机飞行速度、电机转速、飞行航高、激光发射频率四个参数之间存在矛盾性,设计过程中不能同时满足D1、D2相等。为达到密度要求1 point/m2需D1<1 m、D2<1 m。
具体设计参数如表1所示。
2.3 基站选取
基站数据采用GNSS+CORS基站数据,基站的观测时间应该长于LC-3500的有效作业时间,因此要求航飞之前30 min必须架设好基站并开机,航飞结束后继续观测30 min后关机。CORS站数据覆盖时间应覆盖GNSS基站观测时间。基站GPS接收机的接收频率一般设为1 Hz,如果接收机达不到1Hz的接收频率,需要在后处理中进行内插来加密采样间隔。基站仪器高需要量测二次,并记录。准确记录开关机时间。

表1 飞行设计参数Tab.1 Flight design parameters
(1)基站点布设原则:距离测区的边缘不超过50 km;检校场的基站一般要求在15 km以内;
(2)基站观测时间长,注意电池电量的保证,一般必须满足8 h以上的连续观测。存储卡的容量一般要求8 M以上;
(3)使用双频GPS接收机及高精度配套天线;
(4)观测要求:
1. 和机载GPS同步观测;
2. GPS卫星高度角≥15°;
3. 有效观测卫星个数≥5;
4. GPS接收机采样频率一般要求2 Hz(最小不低于 1 Hz)。
5. 地面基站的高程要达到四等水准精度。
6. 观测时要认真量取GPS天线高,填写观测手簿等相关资料,GPS天线高的量取,在每个时段观测前后各量测两次天线高,两次读数差不能超过2 mm,取平均值作为各次的读数,前后两次读数差不能超过3 mm。
2.4 数据采集质量控制
激光雷达设备的工作对于飞机的飞行质量是有一定要求的,在进行航飞之前,需要摄影员与飞行员进行认真的沟通和技术交流,确保飞行员对于激光雷达设备的飞行要求做到理解和掌握。否则,一旦在空中出现问题,不但降低了整个飞行的效率,而且对最终的数据成果质量也会造成不同程度的影响。一般来说,装载了GPS和IMU的设备,对于飞行要求大致如下:
(1)“8”字飞行
由于IMU容易受到累积误差的影响(如drift),高精度的IMU(如美国Honeywell的uIRS)可以达到0.01°/h累计误差,低精度的IMU(如德国iMAR的FSAS)仅可达到0.5°/h的累计误差,但即使最好的 MIU所造成的漂移累计误差都会对数据精度产生影响。因此,装载了IMU的LiDAR设备,在每次进入测区开始沿航线飞行前和飞完航线返回机场前,都必须进行IMU初始化飞行,以提高IMU的后处理精度[16],即:进入测区进行航线飞行前先平飞5 min,然后做“8”字转弯飞行,飞完最后一条航线后,在做“8”字转弯飞行,平飞5 min。
(2)静态观测
如果测区距离机场很近,飞机在开车之后,正常启动系统并需要地面静态GPS观测5 min。飞机落地后,也需要设备静态GPS观测5 min。如果测区离机场距离较远,飞机在飞进测区的途中飞行时间在30 min以上,则无需进行地面静态观测,但要保证飞机在空中飞行足够长的时间以锁定GPS卫星。
(3)转弯坡度要求
转弯坡度<22°,最好在15°~20°之间。
(4)航线上飞行姿态要求
Roll(侧滚角)<5°;
Pitch(俯仰角)<5°;
Heading(航偏角)<20°。
左右航偏距离<75 m,超过200 m自动停止曝光。
上下航偏距离<100 m,超过300 m自动停止曝光。
(5)飞行速度要求
本次选用PC6运输机执行任务,整个计划的航线飞行速度(对地速度)在200 km/h左右,速度允许在±20%范围内浮动。
2.5 数据质量检查
对航摄采集回来数据要立即进行初步的数据质量检查,如果数据质量满足规范及项目要求,则需要进行归档和备份,如果数据质量存在问题,则需要进行补飞或重飞。需要检查的数据:原始 GPS/IMU数据,原始激光数据,原始影像数据,基站GPS数据。检查的流程和内容包括以下几个方面:
1. GPS/IMU数据解压
利用 POSpac软件,将原始数据进行解压,解压后的数据导入软件,软件会对GPS/IMU数据的整体状态做出最终评估。大于5个IMU采样间隔时间的漏洞会导致飞行轨迹数据的精度严重下降。1个或者2个采样间隔的漏洞可以在后处理中内插,数据处理仍然可以正常进行。
2. 导航文件的精度指标
高质量的的轨迹文件是保证高质量检校和数据点云精度的关键,因此需要严格控制和检查。POSpac解算后可输出精度指标,供航摄员评估数据质量。
3. 激光数据检查
(1)回波比例:在地表以建筑物、植被、道路为主体的地区,正常的激光回波比例应该在95%以上,部分地区可以达到100%。
(2)航线重叠度:检查航线数据的旁向重叠度是否满足要求。
(3)数据完整性:检查航线中部是否有数据丢失的现象,检查航线边缘是否有数据丢失的现象。
4. 影像质量
(1)影像数量:主要检查影像存储数据量是否与预计拍摄数量相同,是否存在漏片现象。
(2)影像重叠度:航向重叠是否满足65%,旁向重叠是否满足35%。
(3)影像质量:检查影像辐射纠正后色彩亮度、色彩均匀度、分辨率是否正常,影像的CCD像元是否完好,是否存在坏点、坏线等情况。
2.6 精度评价
根据测区的范围以及地形情况将在测区布设三个精度验证区,精度验证区在距离基站、检校场较远、精度相对较弱且外业控制实施容易的区域选取,不同精度验证区应选在不同地形条件、不同航线且相距较远的区域。
每个验证区选取一幅图,高程检核点选取平整路面或学校操场广场等,尽量均匀分布一图幅内,平面的检核点选取高大规则建筑物。每幅图测量点数不少于20个。三个精度验证区面积分别为15 km2、10 km2、11 km2,每个区选取多检测点,保证精度满足成图要求,出具精度检测报告。
2.6.1 高程精度评价
本次高程精度检测共分为三个区域,分别分布在摄区的上中下三个区域。高程验证点为平整道路路面及道路交叉口四角(使用仪器 RTK),每隔 50米一个点。兼顾安全的前提下,尽量选择道路中线。图1为其中一个区域的道路选择示意图。
三个区域分别采集 405个点,205个点和 410个点,将验证区采集的高程点通过Terrascan与中卫的点云数据进行自动平差检测,生成激光点云的高程精度报告。表2为高程精度统计表,图2为高程精度检测示意图。
将三个精度验证区采集到的高差精度数据进行分段统计,并得到各阶段所占比例如表3所示。
《机载激光雷达数据获取规范》要求,1:2000点云数据高程中误差平地0.25 m,丘陵地0.35 m,山地0.85 m,通过验证得到中部验证区点云数据高程中误差0.089 m,上部验证区点云数据高程中误差0.135 m,下部验证区点云数据高程中误差0.125 m,满足1:2000规范点云数据高程精度要求而且满足项目要求。

图1 道路选择示意图Fig.1 Road selection diagram

图2 高程精度检测示意图Fig.2 Elevation accuracy detection diagram

表2 高程精度统计表Tab.2 Elevation accuracy statistics
2.7 平面精度
平面验证点为选择高大厂房的房角、房屋屋脊以及对应的地面高程(使用仪器全站仪)。本次三个验证区采集房屋12个工共采集有效点数72个,为方便厂房的辨识度只加载厂房周围一定距离的点云数据并拟合出厂房边界。将拟合出的房屋边界与实测房屋边界进行对比分析并统计得到平面误差值。结果显示平面最大误差值0.538,最小误差值0.013,中误差0.218。实测点与激光点云对比结果如图3所示。

表3 高程精度分布(单位cm)Tab.3 Height Accuracy Distribution (in cm)

图3 实测点与激光点云对比Fig.3 Measured points and laser point cloud contrast
对所测得的平面点精度分段统计,并得到个阶段所占比例如下表(单位cm):
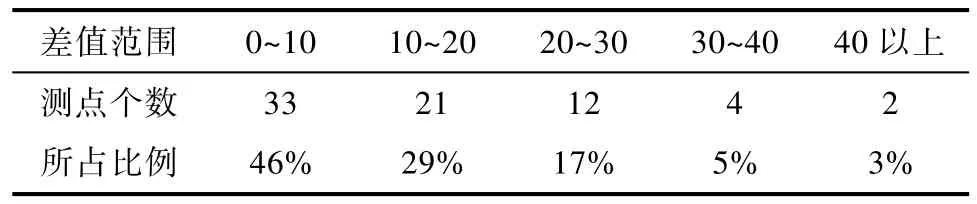
表4 平面点精度分布Tab.4 flat point accuracy distribution
通过外业精度检测可知,本次精度评估中,测区高程及重要地物平面点位误差在两倍中误差以内数据大于95%,点云检测精度较高,数据可信且满足规范要求。
3 结束语
本文通过机载激光雷达多脉冲多频率的作业模式在山区数据采集中的应用及精度分析,说明了多脉冲模式在山区数据采集的可行性。对于地形起伏较大的地区或飞行高度要求较高时机载激光单脉冲模式也可以完成,但只能在低脉冲频率下工作,采集的点云密度相对较低,难以满足高精度制图需求多脉冲模式则可以很好的解决这一问题。多脉冲模式虽然具有作业效率高等更好的优势,但是在面对地形欺负较大的区域时,会受到大气边缘区的影响,如何规避大气边缘区的影响是必须考虑的问题。
[1] 王勇, 熊爱武. 机载LiDAR点云数据精度评定方法的研究[J]. 测绘与空间地理信息, 2013, 36(8): 130-131+134.
[2] 杨卫. 机载激光雷达技术在高山区水电工程测绘中的应用[D]. 西南交通大学, 2016.
[3] 刘非. 应用机载LiDAR系统测制丘陵地区的大比例尺地形图[J]. 测绘通报, 2012(5): 84-87.
[4] 黄昉菀, 戴礼豪, 陈国龙, 郭文忠. 基于激光数据特征提取的一般环境下实时定位方法[J]. 软件, 2012, 33(5): 9-11+14.
[5] 刘博文, 童立靖. 基于多视角三维扫描数据的图像配准[J].软件, 2016, 37(10): 29-32.
[6] 谢劭峰, 刘田龙. 国产机载LiDAR系统安置角误差检校方案研究[J]. 测绘与空间地理信息, 2016, 39(6): 50-55.
[7] 王磊, 郭清菊, 姜晗. 基于改进的八叉树索引与分层渲染的海量激光点云可视化技术[J]. 软件, 2016, 37(3): 114-117.
[8] 杨蒙蒙, 李军杰, 关艳玲, 左建章. 国产机载SW-LiDAR系统定位模型的建立与精度分析[J]. 测绘科学, 2014,39(7): 33-39.
[9] 张衡, 李通, 肖鹏, 徐花芝. 机载LiDAR技术在山区高速公路勘测设计中的研究与应用[J]. 北京测绘, 2016(6): 95-98.
[10] 伊丕源, 童鹏, 张景发, 赵英俊, 张川, 吴文欢. 机载激光雷达多脉冲探测模式在大高差地形测绘中的应用分析[J].科学技术与工程, 2015, 15(8): 4-9.
[11] Roth R, Thompson J. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. XXVII (2008) pp. 183-188.
[12] 何秉高, 安志勇. 基于激光雷达的水平测量技术研究[J].激光与红外, 2014, 44(8): 866-869.
[13] 赖旭东. 机载激光雷达基础原理与应用[M]. 电子工业出版社, 2010: 77-79.
[14] 李志杰. 国产机载LiDAR技术及其在电力巡线中的应用[D]. 昆明理工大学, 2013.
[15] 左建章, 关艳玲, 李军杰. 高精度轻小型航空遥感系统集成与实现[M]. 测绘出版社, 2014: 90-95.
[16] 赵小衡. LiDAR铁路测绘飞行作业技术研究[J]. 科技创新与应用, 2012(19): 40.
