城轨塞拉门控制系统虚拟样机建立方法研究
2018-03-23王祖进贡智兵顾萍萍谭文才
王祖进,史 翔,贡智兵,顾萍萍,谭文才,王 卫
(1. 南京康尼机电股份有限公司,江苏 南京 210038;2. 南京工业大学,江苏 南京 210009)
0 引言
传统的轨道塞拉门设计常采用方法是先进行门系统的需求分析,然后生产研制出样机,然后再进行门系统的工作运行实验,当通过实验发现问题时,需要修改设计,再加工样机,再进行样机实验,如此反复进行,设计开发过程周期长、成本高。
随着计算机技术的快速发展而发展起来的控制系统虚拟样机技术[1-5],是以控制理论为核心,加上成熟的三维计算机图形技术和基于图形的用户界面技术,将分散的设计和分析技术集成在一起对设计产品进行虚拟性能测试的一种高新技术。它可以在很短时间内完成多次物理样机无法完成的仿真试验,分析不同的设计方案,直至获得样机模型整机系统的优化方案。另外,还能够进行系统不同工况的试验,如不同温度下的性能测试等。利用虚拟样机技术不但可以降低开发成本、缩短开发周期,而且可以极大地提高产品设计的质量[6-8]。
因此,本文采用虚拟样机技术,建立塞拉门控制系统虚拟样机仿真平台,为门系统的设计提供一种仿真模型,降低开发成本、缩短开发周期,提高产品设计的质量,具有很高的经济效益。首先建立直流无刷电机的仿真模型[9-13],然后对电源电压、采样时间、载波频率等参数进行设置,采用速度单闭环控制对电机的空载转速和额定转速进行验证,采用速度、电流双闭环控制对参考输入速度曲线进行仿真分析,将仿真结果和实验结果进行对比,最后根据对比结果对PI(Proportional Integral,比例积分)参数进行调整,得到控制系统的虚拟样机模型。
1 建立电机仿真模型
在Matlab/Simulink软件环境下,对直流无刷电机进行建模[14-15],包括:电机本体建模、三相逆变器建模、换向逻辑控制建模、转速控制建模等。其中采用永磁同步电机模块来搭建直流无刷电机,选用直流电压源,三相逆变器采用Universal Bridge模块,换向逻辑控制模块利用三个霍尔传感器信号、PWM 信号和转速信号组合解码生成逆变桥开关器件的控制信号,整个控制系统采用PWM调速。
2 参数设置
对电机仿真模型的仿真参数进行设置,其中电机本体的参数设置如表1所示;电源电压为110 V;三相逆变器的参数设置如表2所示;PWM生成器的载波频率为20 kHz。
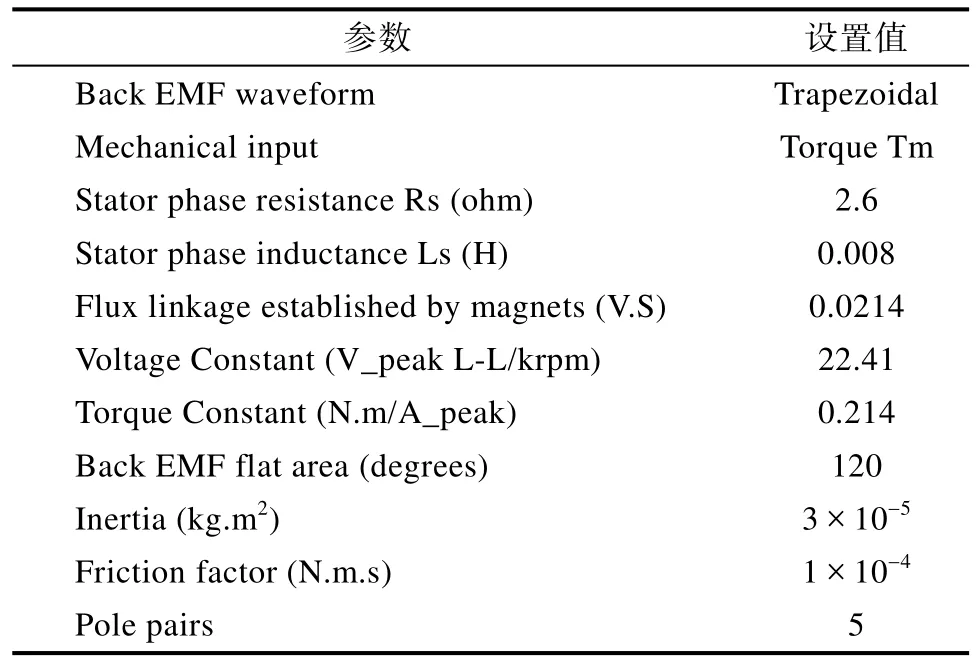
表1 电机参数设置Tab.1 Parameters setting of the motor
3 单闭环控制
电机仿真模型建立好以后,需要对模型和参数的准确性进行验证,为此搭建了如图1所示的单闭环控制系统仿真模型。设置采样时间为5×10-6s,电机的空载转速为 4200 rpm,电机的额定转速为3200 rpm,电机的额定扭矩为0.45 N.m,所以控制系统输入的目标速度为 4200rpm,电机的负载 Tm采用阶跃信号,在0到0.1秒之间Tm的值为0,0.1秒以后Tm的值为0.45。
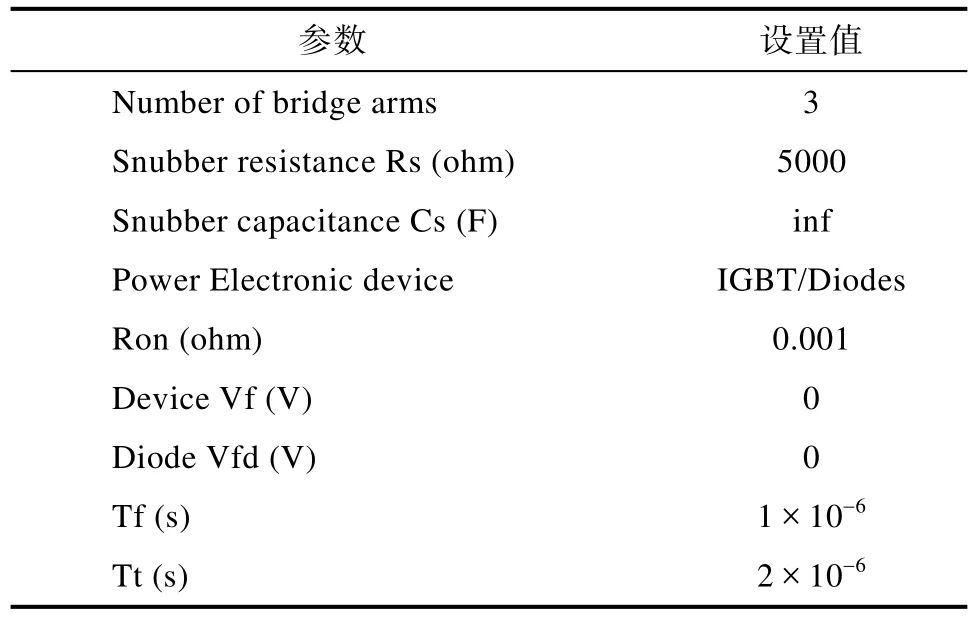
表2 三相逆变器参数设置Tab.2 Parameters setting of the three-phase inverter
设置仿真时间为0.2 s,调整PI参数,得到电机的转速曲线,如图2所示。由图2可以看出,仿真模型中电机的空载转速约为4200 rpm,电机的额定转速约为3200 rpm,从而表明建立的电机仿真模型和设置的参数是正确的。
4 双闭环控制
城轨塞门控制系统采用的是速度和电流双闭环控制,根据实际门控器的控制逻辑建立双闭环控制系统仿真模型,包括:内环电流PI控制和外环速度PI控制,如图3所示。设置采样时间为1×10-5s,控制系统输入的参考速度曲线如图4所示。根据输入速度曲线,将塞拉门的运动过程分为6个不同的工作区域,即启动段、加速段、高速段、减速段、缓行段和加强段,每个运动阶段采用不同的PI参数进行控制。对塞拉门系统进行实验测试,得到电机输出扭矩曲线,如图5所示,以实验得到的电机输出扭矩作为电机的负载Tm。
5 仿真分析
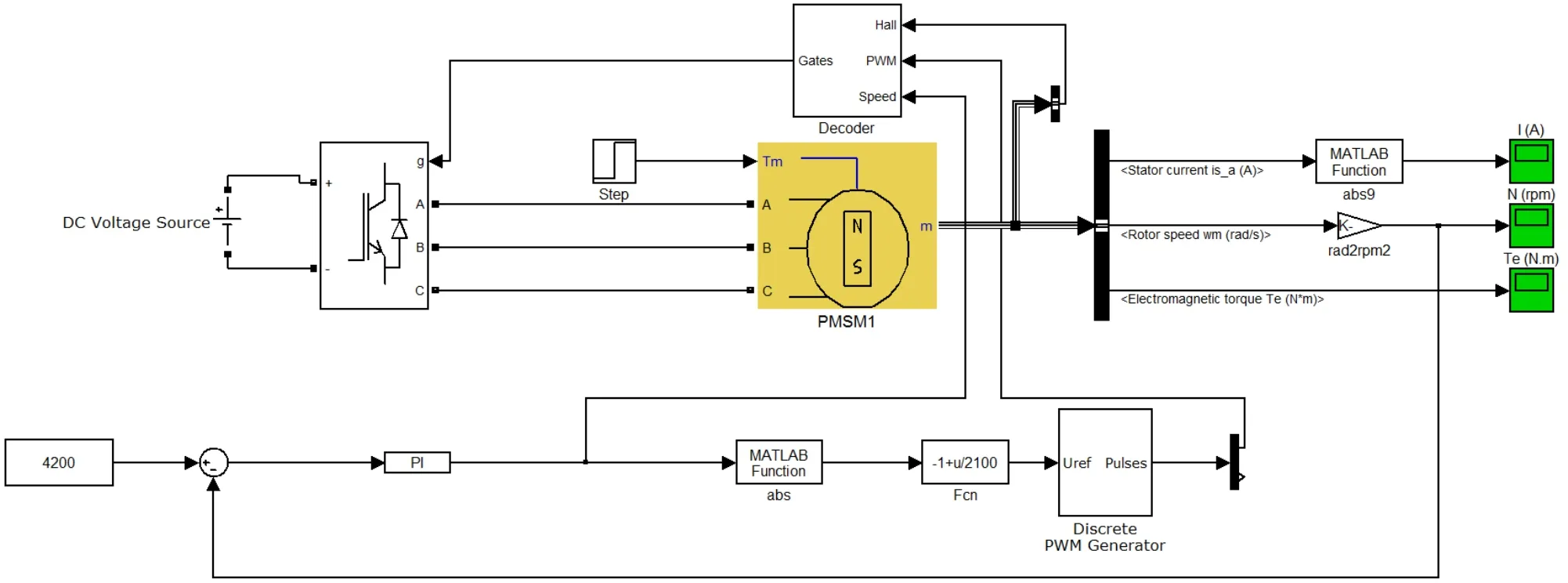
图1 单闭环控制系统Fig.1 Single closed loop control system
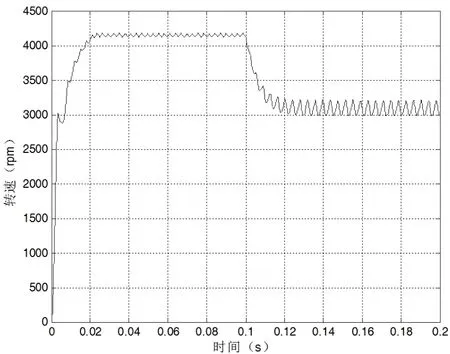
图2 电机转速仿真结果Fig.2 Simulation results of the motor speed
设置仿真时间为 3 s,调整各个运动阶段的 PI参数,得到电机的转速曲线和电机的驱动电流曲线。对塞拉门系统进行实验测试,得到电机的转速曲线和电机的驱动电流曲线。将仿真结果与实验结果进行比较,如图6和7所示。若电机转速和电机电流的误差小于5%,说明所建模型的准确性及仿真分析的可行性;若两者误差大于5%,说明所建模型与真实模型存在较大的误差,调整PI参数,直至两者误差小于5%,至此,得到控制系统的虚拟样机模型。
6 结论
基于Matlab/Simulink的模拟仿真功能,提出了一种城轨塞拉门控制系统虚拟样机建立方法。对整个门系统的控制过程进行了仿真,得到了电机的输出转速和驱动电流,并与实验数据进行了对比,根据对比结果对PI参数进行了调整,最终得到了高精度的虚拟样机模型。文中方法避免了传统分析方法需要在实际样机完成后才能进行的缺点,直接通过计算机虚拟环境就可以定量、准确分析门系统的控制性能,可大大降低开发成本、缩短开发周期,降低产品开发的风险。该方法还可以推广应用到其他类似的复杂控制系统的仿真分析中,实现快速、高质量、低成本的设计目标,具有很高的参考价值。

图3 双闭环控制系统Fig.3 Double closed loop control system
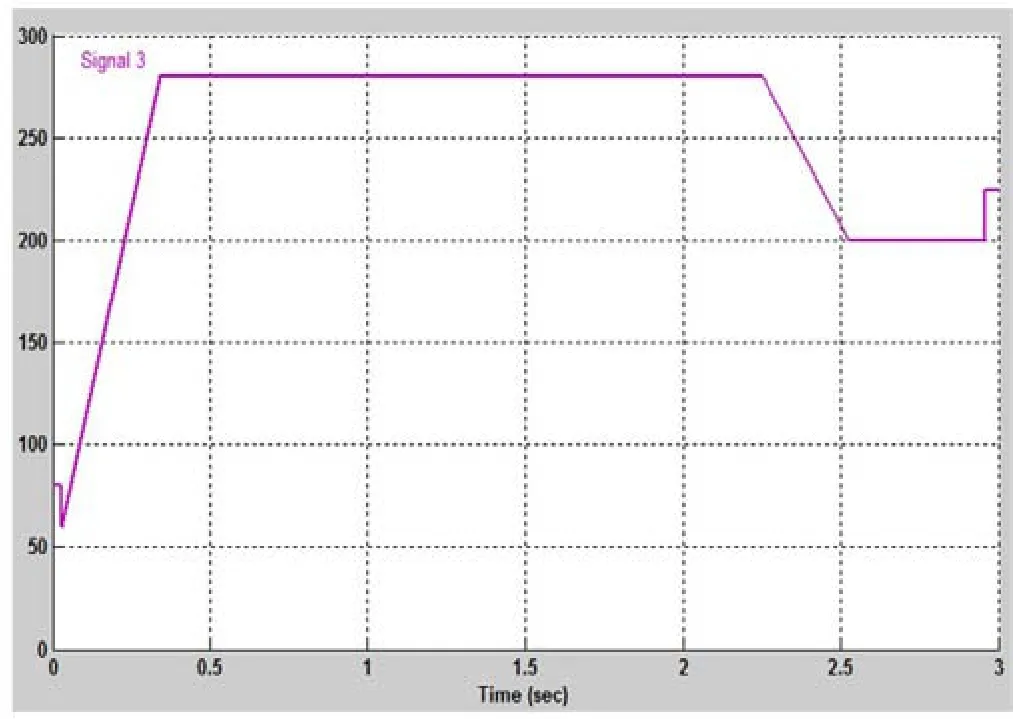
图4 参考速度曲线Fig.4 Reference velocity curve

图5 电机的输出扭矩曲线Fig.5 Output torque curve of the motor
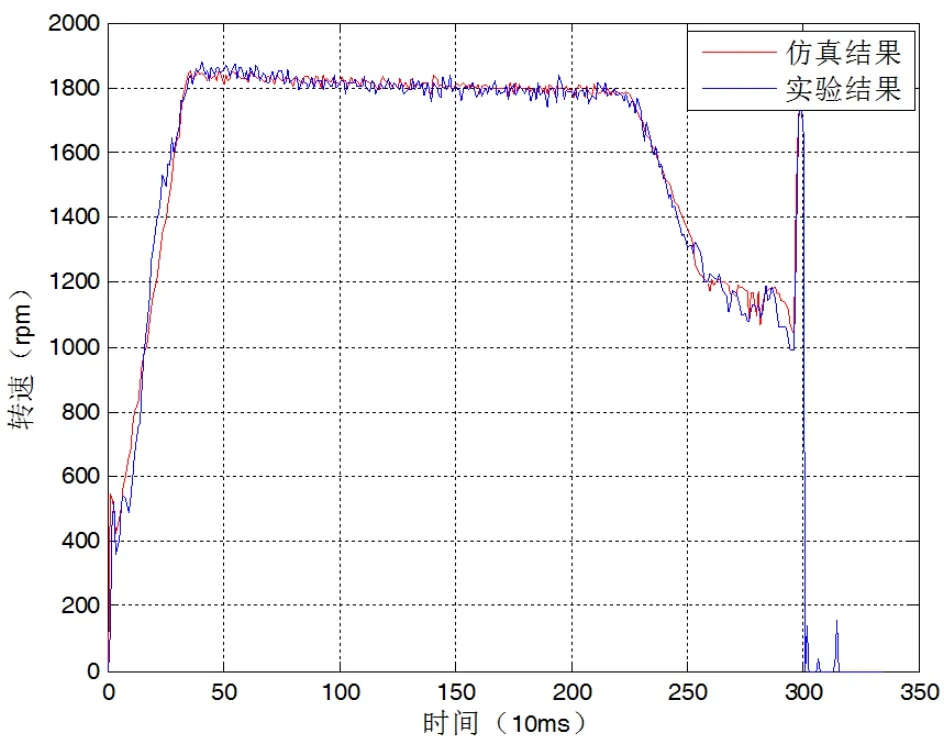
图6 电机转速的结果对比Fig.6 Results comparison of the motor speed
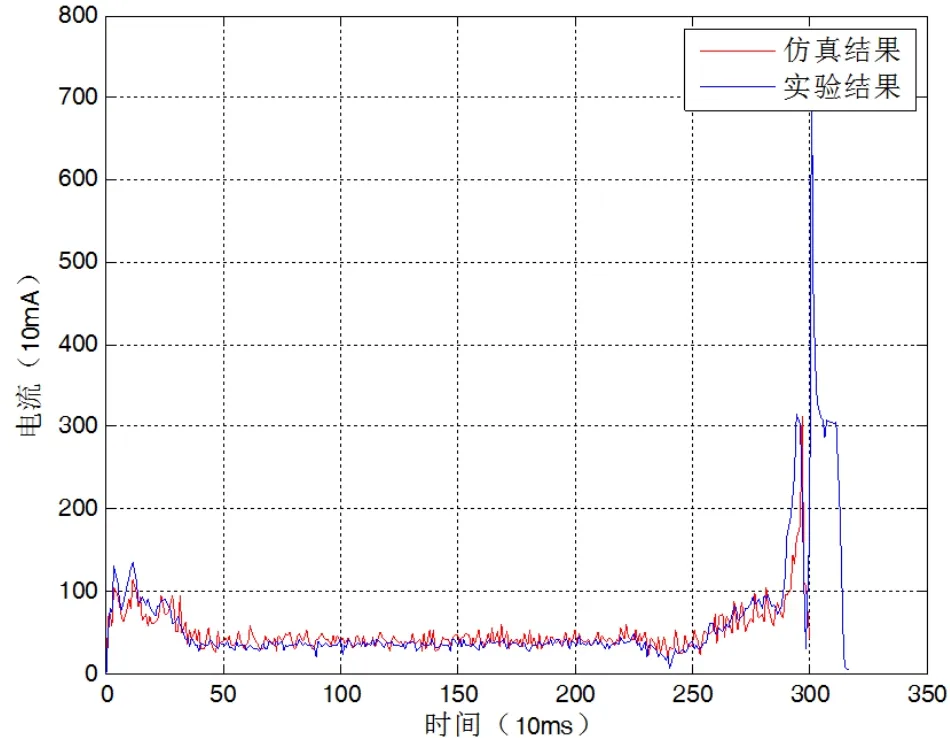
图7 电机电流的结果对比Fig.7 Results comparison of the motor current
[1] 袁亮, 于春梅. 虚拟样机环境下机械臂模型验证与控制系统仿真[J]. 机械设计与制造, 2016, (5): 5-8.
[2] 于春梅, 易奎, 侯惠让, 等. 基于虚拟样机技术的控制系统实验平台开发[J]. 实验技术与管理, 2014, 31(2): 82-84.
[3] 常文泰, 张冉, 王利华, 等. 虚拟样机技术及虚拟样机试验[J]. 软件, 2016, 37(7): 84-88.
[4] 周进, 张东升, 梅雪松, 等. 基于虚拟样机技术倾转四旋翼飞行器联合仿真[J]. 计算机仿真, 2015, 32(1): 94-98.
[5] 张静波, 程力, 胡慧斌, 等. 基于虚拟样机的反后坐装置故障仿真技术研究[J]. 计算机测量与控制, 2012, 20(5):1287-1289.
[6] 王蕾. 虚拟样机技术在某悬架系统设计中的应用[J]. 汽车工业研究, 2017, (4): 54-59.
[7] 伍经纹, 徐世许, 王鹏, 等. 基于Adams的三自由度Delta机械手的运动学仿真分析[J]. 软件, 2017, 38(6): 108-112.
[8] 汤晓燕, 刘少军, 云忠. 基于虚拟样机技术的深海采矿主动式升沉补偿系统设计[J]. 北京工业大学学报, 2008,34(5): 454-458.
[9] 孟姗, 张学锋. 基于Simulink的无刷直流电机控制系统仿真研究[J]. 智慧工厂, 2017, (2): 50-54.
[10] 程启明, 杨小龙, 高杰, 等. 基于参数可变PID控制器的永磁无刷直流电机转速控制系统[J]. 电机与控制应用, 2017,44(1): 18-22.
[11] 徐志书, 李超, 何雨昂. 基于Matlab/Simulink方波直流无刷电机位置伺服仿真研究[J]. 电子技术与软件工程, 2016,(10): 136-137.
[12] 赵海良. 智能控制系统仿真技术分析[J]. 软件, 2011, 32(7):15-20.
[13] 魏江鹏, 文程祥, 涂世军. 基于Matlab的永磁无刷直流电机仿真控制系统[J]. 装备制造技术, 2016, (12): 47-48.
[14] 谢少华, 瞿遂春. 基于Matlab的无刷直流电机控制系统仿真研究[J]. 新型工业化, 2015, 5(3): 28-34.
[15] 张旭. 无刷直流电动机调压系统BUCK直流变换仿真[J].新型工业化, 2016, 6(7): 56-60.
