基于ARM系统的旋翼飞机的设计
2018-03-22戴亦宗

摘 要 基于STM32F427的ARM构架微控制器来实现四旋翼飞行控制系统,构建了飞行器的基本结构,机械结构实现了模块化设计。飞行控制器通过采集加速度传感器、三轴姿态传感器、地磁传感器传感器信号,采用经典PID算法研究控制系统的参数,输出PWM波形来控制四个电机转速,实现四旋翼飞行器姿态的控制调节。试验测试表明,该系统能够在搭建的狭小空间主动避开障碍,具有稳定飞行的能力。
【关键词】机体构架 姿态传感器 信号滤波 PID算法
1 引言
20世纪90年代后期,随着微机电系统、传感器技术的成熟及惯性导航系统的开发,使得多旋翼飞行器的自动控制变为现实。目前,旋翼无人机具有定点悬停等固有特性,能在复杂条件下起飞及降落,并且不需要特殊起降场地,具有较高的自动化技术,方便搭载不同的设备以实现不同的用途,其在军事、民用领域得到越来越广泛的应用。
本文设计了基于ARM系统的旋翼飞机,包括基本結构的选择,机械结构的模块化设计,系统硬件设计、避障方案及现场调试,试验测试表明,该系统能够在搭建的狭小空间主动避开障碍,实现稳定飞行。
2 结构设计
2.1 基本结构框架
多旋翼无人机根据旋翼数目不同及安装结构不同,其飞行性能及控制参数有差异,平铺四轴架构,特点是结构简单、便携,效率较高,飞行平稳,动力冗余较差。
X8架构,特点是较为便携,动力冗余充足,飞行平稳性好。三轴平铺架构,特点为效率最高,但机械结构复杂,且较难控制。
在进行飞行结构系统选型之前,首先要确定飞机的起飞重量,由于本次设计为轻型多旋翼无人机实验平台,将起飞重量限定在7.5kg以内,载重并没有超过8kg,考虑经济性和便携性,仅对X8结构及平铺四轴结构进行试验效率分析。实验采用4010电机桨间距 13cm的结构,测试结果如图1所示,在起飞重量一定的情况下,共轴双桨的效率比两个电机平铺要小,效率只有82%左右;相同输入功率情况下,共轴双桨与只与单电机效率相当,因此,采用四轴平铺架构。
2.2 机体结构设计
机臂设计,如图2,根据设计要求,起飞重量为7.5kg,总体结构为四轴平铺,每轴的平均受力为1875g,每轴平均受力=起飞总重量/机臂总数,已知机臂总长300mm 支撑点距动力端250mm 即支点处受最大应力370MPa,采用3k 15mm 碳纤维方管即可满足设计要求,并有相当冗余以适应高机动飞行。起落架设计由曲柄连杆机构及舵机和控制电路部分构成,具有自锁功能,利用曲柄机构的死点特性在不装配舵机的情况下可以当做固定式起落架,不管降落的时候受到多大的冲击力,起落架都不会收起来,更大的保护了飞行器的安全。安装舵机后就是一个收放式起落架,可以自由的收放。起落架固定座采用一体化设计,大大增强了起落架强度,增强了降落时受力的分散,采用碳纤维材料,重量轻,摆动阻力小,不容易损坏舵机。
3 硬件电路设计
系统的飞行控制系统采用模块化设计,通过采集陀螺仪、加速度计、GPS位置、地磁感器、气压、温度传感器等信息进行姿态检测和控制,控制器控制四个无刷电机作为动力引擎,并通过PWM脉宽调制技术及PPM载波聚合技术控制飞机姿态,从而实现稳定飞行和自动驾驶飞行功能,完成多种任务。 通常四旋翼无人控制系统内置FLASH ROM存储芯片,以便能记录飞行器执行任务时的所有数据(黑匣子),方便对飞行任务进行检查,也方便对事故原因进行分析与调试。系统控制MUC选择32bit STM32F427 Cortex M4核心,168 MHz;l256 KB RAM;l2 MB Flash;32 bitSTM32F103同步协处理器。
3.1 电源模块
采用Ld1117三端稳压器及MIC5207电源模块,分别对MCU进行供电,以保住主控供电的稳定性。同时加入了自恢复保险丝和反接二极管,充分保护MCU。
3.2 传感器电路
充分考虑可靠性和稳定性,综合经济因素。采用 ST公司L3GD20H 16 bit陀螺芯片;MPU-6050加速度芯片;HMC5883L地磁传感器;MEAS公司MS5611气压芯片。如图3-图6所示。
飞行器运行状态数据采集采用FM25V01 128K非易失存储器存储芯片。这种存储器速度快,掉电不会丢失数据,一般用来做备份数据存储,一旦飞控空中故障重启,可以延续前面的状态和计算结果。
飞行器避障设计超声波传感器方案,通过软件设置滤波,达到较好的使用效果。避障系统采用外挂式模块化设计,外置MCU与飞行控制器进行通讯,将采集到的传感器信息进行处理与判断,并将输出结果反馈回飞行控制器。
4 系统调试及参数整定
4.1 卡尔曼滤波
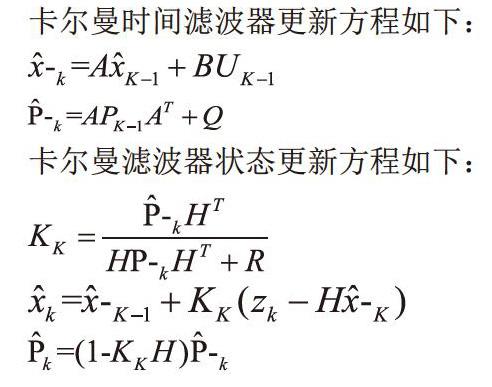
飞行器在运行过程中,各传感器的测量值必然存在一定的误差,需进行滤波,防止毛刺或数据异常等突然因素影响飞行的稳定性。卡尔曼滤波根据当前时刻的观测值、上一时刻的预测值及预测误差,计算得到当前的最优量去预测下一刻的量,分为时间更新方程和测量更新方程。
卡尔曼时间滤波器更新方程如下:
卡尔曼滤波器状态更新方程如下:
4.2 PID系统调试
四旋翼无人机在空中飞行时需要控制6个自由度,分别是高度、经度、纬度三个水平自由度,以及俯仰、航向、滚转三个旋转自由度,水平自由度就是指位置差,速率和加速度;自由度是指的角度差,角度率和角加速度。系统采用PID控制方案,由于四旋翼无人机在空中收影响因素较多,故无法单纯从理论计算得出确切的PID参数值,通常的调整顺序为:先调整参数P,再加入I,最后调整D,比例调节将实际值与理想值之间的误差以放大P倍调节,因此理论上参数P越大越好,但过大的P值将会导致超调量过大,所以在调参时P调到不让飞行器产生抖动的最大值。
其中:
若四旋翼飞机无法起飞;且加大电机转速情况下发生倾覆等现象。根据经验,减小I的数值可以解决问题,若四旋翼起飞后,高频抖动,电机产生高频噪音。根据上述分析,可能 P过大造成的不断高速超调,减小P的数值基本上可以解决。若四旋翼起飞正常并无高频振荡,但操作反应迟滞且较难稳定,根据经验,I的数值过大,造成过程极其缓慢,所以适当减小I可以解決问题。如图7所示。
为了调节飞行器的 PID 值,使飞行器能够稳定飞行,系统对各轴陀螺仪与加速度波形进行观察,采集到飞行器飞行过程中的部分姿态数据如图8、9所示 系统根据采集到的加速值及陀螺仪数据值对飞行姿态进行控制,从而使得飞行器平稳飞行。
5 结语
本文针对旋翼飞行器的结构特点,设计了四旋翼飞行器的机械结构、硬件电路和程序算法,采用经典PID 控制器进行姿态角控制。经测试,系统的稳定性能、动态性能、飞行避障均达到的设计要求。
参考文献
[1]陈海滨,殳国华.四旋翼飞行器的设计[J].实验室研究与探索,2013,32(03):41-44.
[2]李宁.基于MDK的STM32处理器开发应用[M].北京:北京航空航天大学出版社,2009.
[3]周杏鹏.传感器与检测技术[M].北京:清华大学出版社,2010(09).
[4]鲍齐克.数字滤波和卡尔曼滤波[M].凌云旦译.北京:科学出版社,1984.
[5]叶利栋,都庆庆等.基于STM-32的自动四旋翼飞行器设计[J].上海工程技术大学学报,2015,29(01):49-52.
[6]王福超.四旋翼无人飞行器控制系统设计与实现[D].哈尔滨:哈尔滨工程大学,2013.
[6]McKerrow P.Modeling the Draganflyer four-rotor helicopter[C].IEEE Intemationa Confereneeon Roboties and Automation.2004:3596-3601.
作者简介
戴亦宗(1981-),男,江苏省扬州市人。研究生,硕士学位。现为扬州职业大学电气与电气工程学院副教授。主要研究方向为自动化控制技术。
作者单位
扬州市职业大学 江苏省扬州市 225001
