果园节水灌溉控制系统设计与试验
2018-03-21陈伟森孙道宗广州工程技术职业学院信息工程系广州50075华南农业大学电子工程学院广州5064
陈伟森,俞 龙,孙道宗(. 广州工程技术职业学院信息工程系,广州,50075;.华南农业大学电子工程学院,广州 5064)
我国是一个传统的农业大国,农业用水量占总用水量的70%左右,而农业用水主要体现在农业灌溉。要实现现代农业的可持续发展,必须大力发展节水灌溉。自动化和智能化灌溉可以提高水资源的使用效率,对灌溉进行科学管理,可以节省人力物力,提高劳动生产率[1,2]。推广智能化的节水灌溉系统,提高农业灌溉自动化水平,是推进农业现代化的必然选择[3,4]。
节水灌溉技术的应用一定要有前期相关专业知识的指导与培训[5]。目前采用的节水灌溉技术还是根据经验判断、人为灌溉,保持着“宁多勿少”的灌溉原则,造成水资源浪费和灌溉效率低[6]。与现有的大水漫灌、沟灌等传统的灌溉方式相比,节水灌溉技术具有更多的技术含量和技术难度,在具体的操作和实施过程中会遇到很多问题,在操作的时候需要有专业性的技术指导人员进行协助和管理。但是基于中国农村的基本现状,农村基层的水利部门以及节水灌溉技术方面的技术指导人员素质相对偏低,技术能力不高,数量相对不足,致使专业技术人员在指导农户节水技术的具体实施过程中,不免力不从心,很难做到技术出现问题及时解决[7,8]。因而,研究节水灌溉自动控制系统尤为必要,用户根据专家建议设定灌溉参数,使系统处于自主运行状态。
目前,农业节水灌溉自动控制系统中所采用的通信方式分为无线和有线两种。无线方式有使用GSM公网的GPRS方式和采用自组网方式(如ZigBee、Wi-Fi等无线网络),有线方式中多采用公用有线电话网或架设专用线路(如RS-485总线式结构)[9-11]。陈辉[12]研究ZigBee与 GPRS技术的温室远程智能灌溉系统,结合了ZigBee网络有分布灵活、部署方便的特点与GPRS传输范围广的特点,但是也存在GPRS方式的缺点是通信协议复杂,且依赖于网络的覆盖和服务的繁忙程度,安全性差,后期需要支付的流量费用太高的问题,而ZigBee在有障碍物的情况下通信距离不足200 m。电力线载波通信(Power Line Carrier Communication, PLCC)技术使用电力线作为传输媒介,不需要单独的信号线。相比RS-485总线等,可以节省大量通信专用电缆,有效降低成本。电力线载波通信方式较现有无线技术通信方式传输速度高,信号更加稳定。电力线载波通信方式在灌溉自动控制系统中的使用安装与使用成本较其他有线通信方式低[13]。
将电力线载波通信技术应用于灌溉的智能控制系统,符合高效农业的发展要求。该技术在农业中的应用不是很广泛,在农业领域有广阔的应用前景。
1 轮灌智能控制的硬件设计
1.1 系统的组成
分区轮灌技术适用在山地果园中,既可以降低系统对水源水压的要求,又可以使用小口径水管供水。山地果园中,果园果树通常成行成列整齐排列,轮灌系统通过干管将水从水源引到灌溉地区,再通过支管按行或列将水引至各灌溉位置。安装在各支管上的控制电磁阀通常位于干管和支管的结合处,故轮灌系统的供电线路通常为沿着干管的总线型网络拓扑结构。轮灌智能控制系统包括总控制器节点、传感器节点、水泵控制节点。本设计的系统方案框图如下图1所示。
系统通信部分采用电力线载波通信方式,控制部分根据传感器数据控制继电器动作。考虑到使用的安全性和电磁阀的供电电压,220 V交流电并不适合直接应用在农业灌溉系统中,电力线采用24 V直流电。由于实际果园中灌溉区域面积很大而且相对分散,使得通信距离大大增加。

图1 系统方案框图Fig.1 System Blockdiagram
1.2 ST7540低压电力线载波通信模块的设计
ST7540低压电力线载波通信模块是系统的核心部件,它实现了载波信号在24 V直流电力线上的数据传输。ST7540芯片是意法半导体(STMicroelectronics,ST)设计生产的新型电力线收发芯片,可适用于交流、直流和不通电导线中。ST7540拥有非常低的功耗,静态电流5 mA。芯片供电电压从直流7.5~12.5 V。片内集成输出电流和电压控制回路,可以确保数据的安全可靠传输。FSK调制信号有多个频率可选的正弦波,接收灵敏度高达500 μV(rms),最高通信速率4 800 bps,具有UART/SPI接口。
载波通信模块的框图如图2所示。ST7540内部集成功率放大器、自动增益控制、自动电平控制等功能,可以根据需要动态调整发送的功率。低压电力线上可能会出现未知的阻抗,ST7540内部的集成的电流、电压控制回路可以确保数据的可靠传输。同时为了克服通信过程中可能受到的干扰,最大限度的恢复出发端原始信号,设计滤波电路就显得尤为重要。接收数据时,信号经接收无源滤波器滤波后,将从RX_IN被读入到ST7540进行处理。发送数据时,信号经ST7540调制后通过发送有源滤波器和集成功率放大器,再经发送无源滤波器耦合选频到电力线上进行信号传输[14]。

图2 PLCC模块Fig.2 PLCC module
1.3 主控制器节点设计
总控制器节点整个整个系统的决策中心,保证轮灌策略的执行。总控制器节点由微处理器、电力线载波通信模块、LCD液晶屏、矩阵键盘等组成。提供的功能包括:为用户提供LCD液晶显示,以显示轮灌系统的时间和工作参数;通过电力线载波通信模块与从节点通信;通过从节点返回的土壤水分数据决定是否终止灌溉;根据RTC的时间发送轮灌控制指令。主控制器节点模块框图如图3所示。

图3 主控制器节点框图Fig.3 Blockdiagram of Host controller node
主节点采用意法半导体(ST)公司生产的STM32F103微控制器作为主控,STM32微控制器片内集成RTC(Real Time Clock),只需外部连接32.678 kHz的石英晶振和备用电池(本设计选用CR2032型纽扣电池)即可工作。4个触碰式微动按键用作键盘,用于时间的设置、参数的设置。2.4英寸的LCD液晶屏用来显示系统的当前时间、土壤水分数据等参数。电源模块电力线得到24 V直流后进行降压到3.3 V供给微控制器、液晶屏等模块。
1.4 传感器节点设计
传感器节点负责将土壤水分信息及时的上传给主控制器节点,决定是否停止灌溉。传感器节点功是轮灌控制系统的监测节点,由微控制器、电力线载波模块、土壤水分含量传感器。传感器节点通过电力线接收到主节点发送的控制指令,回传通过土壤水分含量传感器采集的土壤水分数据。传感器节点框图如图4所示。

图4 传感器节点框图Fig.4 Blockdiagram of Sensor node
设计选用由锦州阳光公司生产的TDR-3土壤水分传感器,测量精度在0~50%(m3/m3)范围内为±2%。
2 轮灌智能控制系统的软件设计
系统功能的实现依赖于硬件和软件的协同工作。主节点程序使用C语言编程,利用Keil uVision4作为编程调试平台,使用J-Link V8作为调试器。从节点程序利用IAR Embedded Workbench for STM8 V6.3作为编程调试平台,使用ST-Link V2作为调试器。程序中串口发送过程采用直接发送方式,采用串口中断方式接收数据。
2.1 通信协议的设计
采用的协议为主—从结构的半双工通信方式。帧是传送信息的基本单元。帧结构如图5所示。每一帧由3个部分组成,分为帧同步头、地址域和数据域。
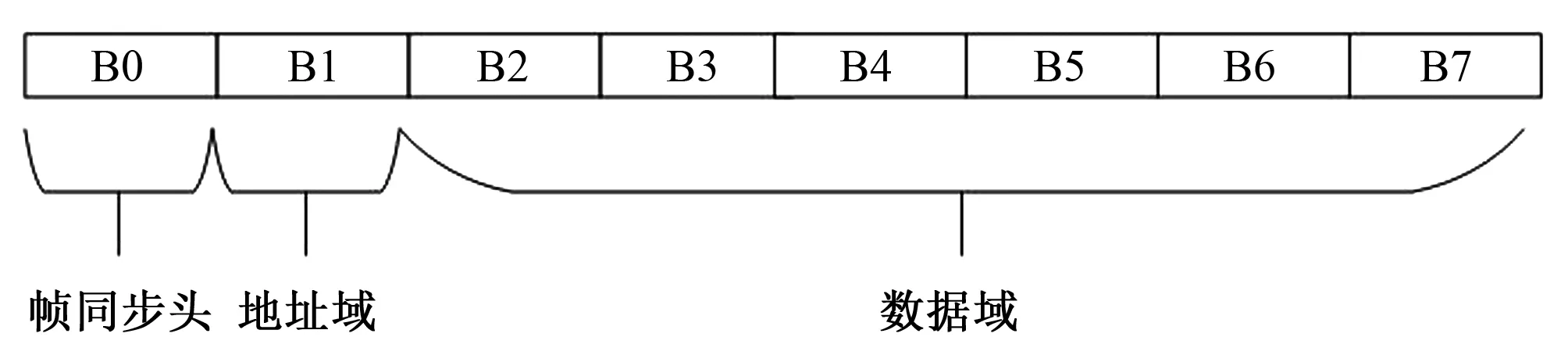
图5 帧结构Fig.5 Frame Construction
每帧一共8个字节。第一个字节为帧同步头,必须为0x9b。第二个字节为地址域,范围00H~FFH,用以区分不同的节点。后面的6个字节为传输的数据。
采用同步传输方式发送,ST7540提供时钟信号,在CLR的上升沿,TXD的数据被读到FSK调制器。采用同步方式接收,ST7540将在片内PLL的上升沿恢复时钟信号,此后,FSK解调器中的值将被读取到数据接收线RXD上。
ST7540内部仅提供纯透明的物理层通信协议,当有噪声信号混入有用信号时,ST7540无法区分,它将与有用信号一起被解调[15]。因此,为保证通信的可靠性,必须编制MAC通信协议。MAC层设计的考虑的重点是如何避免碰撞并降低传送次数[16-18]。编制的通信协议如图6所示。

图6 通信协议Fig.6 Communication Protocol
在4 800 bps,借鉴计算机网络通信中退避算法的思想,当节点有发送数据请求时,先检测总线状态,若总线繁忙,随机延时数十毫秒,检测总线状态,若总线空闲将数据发送到总线上。通信时采用广播方式发送,在总线上的所有节点都可以接收到信息。所有节点始终监听总线上的信息,当有信息时立即接收,各个节点通过判断节点地址确认信息的归属。目标节点将解析接收信息,按照指令执行相关操作。非目标节点则丢弃信息,延时几十毫秒时间后继续监听总线数据。在时间上尽量避开,降低不同节点同时发送数据的概率,提高通信成功率。
2.2 轮灌控制策略及抗干扰措施
轮灌智能控制系统每分钟轮询所有总线下的传感器节点,传感器节点接收到查询指令后,采集土壤水分数据,有序上传到主控制器节点,主控制器节点根据土壤水分含量与预先设定的阈值相比较,如果高于阈值,则关闭电磁阀,停止灌溉。在不超过阈值的情况下,主控制器节点发送轮流灌溉的指令,实现分区域轮灌的目的。
轮灌控制策略如图7所示。

图7 轮灌控制策略 Fig.7 Rotation control strategy
针对电力线频率的脉冲干扰,信号传输距离不超过1 000 m,并把数据分组重组[19],把土壤湿度及控制数据分成若干短数据组,而在接收端给予重组。试验表明,短分组有利于避开电力线上干扰,并在单个短分组被破坏时将其重传,提高系统的传输效率。同时在各节点与电力线的接口处加装阻波器,利用电感和分布电容对不同频率信号呈不同阻抗的特点, 阻挡高频电磁波的干扰。
3 系统测试
实验采用果园轮灌系统中常用的聚氯乙烯绝缘双绞线作为测试电力线,线长100 m,单根线内径为0.5 mm2,绝缘厚度为0.8 mm,额定电流3 A。测试时,双绞线接入大功率的直流稳压电源,稳压电路输出24 V直流。在校园内的盆栽柑橘园对系统进行喷灌测试,检测系统在实际工作过程中,通信的可靠性和分区轮灌系统功能的执行情况。
3.1 测试过程
在盆栽柑橘园选取长势相近的3盆柑橘树(其中1盆土壤较紧实,另外2盆土壤疏松),其中两盆作为试验柑橘,另外一盆作为对照组,对照组全天不喷灌。将1个主节点和2个已分配地址的传感器节点1通过PLCC接入到柑橘园的灌溉系统,其中,传感器节点1部署在土壤紧实的柑橘盆中,传感器节点2部署在土壤疏松的柑橘盆中,水泵控制节点1控制1号电磁阀,水泵控制节点2控制2号电磁阀,测试时,两盆柑橘配置相同的灌溉参数,定时读取两盆柑橘树的土壤含水量,测试场景如图8所示。

图8 盆栽柑橘喷灌测试场景Fig.8 Potted citrus spray test scenarios
系统分为两个喷灌工作时段,早上8∶00开始到11∶00结束和下午17∶00开始到19∶30结束两个时段。将两个从节点的灌溉参数设置为每分钟主节点轮询两个从节点的土壤水分含量,两个从节点轮流喷灌5 min,设定盆栽土壤含水量阈值为33%[20],当超过阈值且主节点轮询得到传感器节点返回信息时停止喷灌,当低于阈值且主节点轮询得到从节点返回信息时开始喷灌。监测到当前土壤水分含量低于33%时,并不会立即开始新一轮的喷灌,而是需要等到下一个轮灌周期,主节点发送开启电磁阀的指令,重新开始喷灌任务。喷灌前后土壤水分含量的变化如图9所示。

图9 灌溉前后土壤水分含量的变化Fig.9 Changes in soil moisture content before and after irrigation
3.2 试验结果
从节点1(土质紧实)开始阶段30 min内,土壤含水量上升缓慢,中间阶段15 min内土壤含水量快速上升到35%,超过阈值然后关闭,停止灌溉,土壤含水量缓慢下降。从节点2(土质疏松)整个阶段土壤含水量缓慢上升,两个从节点经过1 h之后都达到阈值,结束喷灌。在盆栽柑橘测试过程中,每15 min采集一次空气温度,平均气温为18.9 ℃。试验结果如图10所示。每一轮喷灌耗时10 min,期间更新土壤水分数据10次。
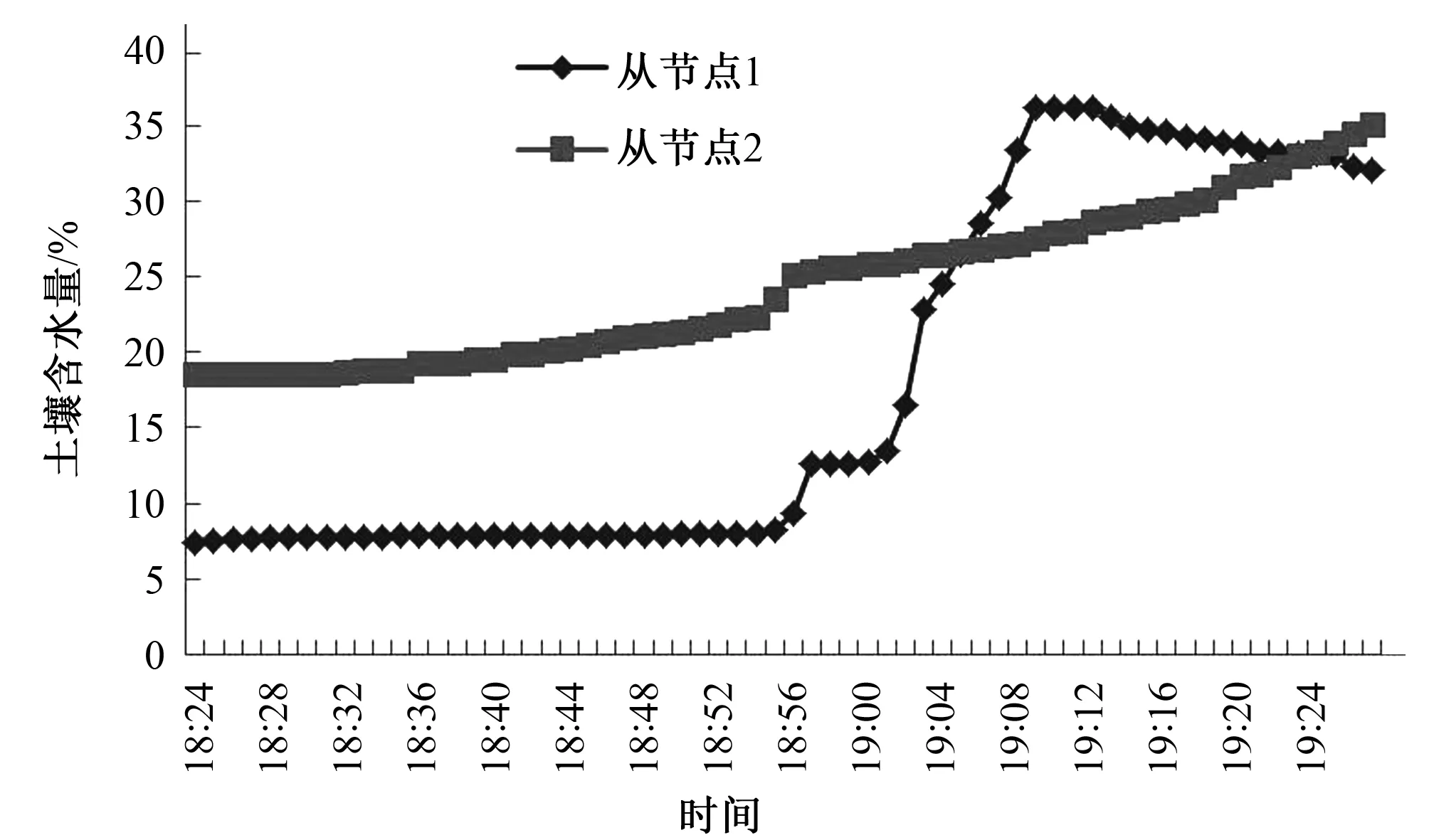
图10 分区轮灌对盆栽柑橘土壤含水量的影响曲线图Fig.10 Partitions round curves of irrigation on soil moisture of potted citrus
实验结果表明,主节点与从节点基于PLCC组成的分区轮灌控制系统能够实现山地果园分区控制灌溉的功能;另一方面可以得知在相同环境参数(温度、湿度)下,土壤含水量变化会受到土壤的松紧程度的影响。
4 结 语
针对传统灌溉控制系统通信方式的缺点,结合山地果园电力线分布特点,将电力线载波通信技术应用于分区轮灌控制系统中,在试验中,系统可以成功将传感器的土壤湿度数据及控制指令通过电力线载波进行传输。
(1)设计了基于PLCC的喷灌智能控制系统,以ST7540电力线载波芯片为核心设计了电力线载波通信模块,以STM32F103微控制器为主控的主节点,用于传感器节点和水泵控制节点,设计了基于ST7540的载波通信协议。
(2)系统采用了轮灌控制策略及抗干扰措施,可以实现分时、分区轮灌,通过抗干扰措施提高了通信的可靠性。
(3)盆栽柑橘的节水自动灌溉系统试验表明, 系统主节点与从节点基于PLCC组成的分区轮灌控制系统能够实现山地果园分区控制灌溉的功能。
[1] 刘灿洪. 不同灌溉方式对秋播甜玉米冠层温光特性及农艺性状的影响[J]. 福建农业学报,2015,(11):1 051-1 055.
[2] 贾文君,万景刚,徐 冰,等. 根际交替灌溉技术在荔枝上的应用效果研究[J]. 福建农业学报,2013,(2):129-133.
[3] 龙晓辉,周卫军,郝吟菊,等. 我国水资源现状及高效节水型农业发展对策[J]. 现代农业科技,2010,(11):303-304.
[4] 焦勤皓. 基于电力线载波的灌溉远程监控系统设计与实现[D]. 银川:宁夏大学,2015.
[5] 赵 斌,范学佳,衣淑娟,等. 旱田节水灌溉智能监控系统的研究[J]. 中国农机化学报,2016,37(7):1 741-178.
[6] 袁寿其,李 红,王新坤. 中国节水灌溉装备发展现状、问题、趋势与建议[J]. 排灌机械工程学报,2015,(1):78-92.
[7] 余国雄,王卫星,谢家兴,等. 基于物联网的荔枝园信息获取与智能灌溉专家决策系统[J]. 农业工程学报,2016,(10):144-152.
[8] 李云开,冯 吉,宋 鹏,等. 低碳环保型滴灌技术体系构建与研究现状分析[J]. 农业机械学报,2016,(6):83-92.
[9] 陈 凤,赵春江,郑文刚,等. 基于PLCC技术的农业节水灌溉自动控制器的设计与应用[J]. 节水灌溉,2010,(2):13-16.
[10] 包长春,石瑞珍,马玉泉,等. 基于ZigBee技术的农业设施测控系统的设计[J]. 农业工程学报,2007,23(8):160-164.
[11] 余国雄,王卫星,谢家兴,等. 基于ASP.NET技术的荔枝园智能灌溉远程监控系统的设计与实现[J]. 福建农业学报,2016,(7):770-776.
[12] 陈 辉. 基于ZigBee与GPRS的温室番茄远程智能灌溉系统的研究与实现[D]. 杭州:浙江大学,2013.
[13] 岳学军,王叶夫,刘永鑫,等. 基于总线技术嵌入式轮灌控制系统的设计[J]. 农机化研究,2013,(7):139-144.
[14] 尹向雷. 基于电力线载波通信的节水灌溉控制系统设计[J]. 工程设计学报,2016,(1):90-94.
[15] 杨福财,饶运涛,王进宏. 基于ST7540的电力线载波通信模块的设计[J]. 电子元器件应用,2008,(3):8-12.
[16] 孙志林,包亚萍,孙 杰. ST7540的MAC(Media Access Control)层通信协议的研究与应用[J]. 微计算机信息,2009,(14):303-305.
[17] IEEE 802.11 Wireless LAN Media Access Control (MAC) and Physical layer (PHY) Specifications[S].
[18] Min Xiang, Chao Wen, Xing zhehou. A hybrid relay control mechanism for ribbon topology in low-voltage power line communication networks[J]. Int. J. Commun. Syst., 2015,283.
[19] 孙秀娟,罗运虎,刘志海,等. 低压电力线载波通信的信道特性分析与抗干扰措施[J]. 电力自动化设备,2007,(2):43-46.
[20] Zimmermann M, Dostert K. Analysis and Modeling of Impulsive Noise in Broadband Powerline Communications[J]. IEEE Trans. Electromagnetic Compatibility, 2002,44(1):249-258.
