加装新型仿形加载机构免耕播种机的动态模拟
2018-03-20李宝筏孟凡成何倍倍张桐嘉
林 静,钱 巍,李宝筏,孟凡成,何倍倍,齐 林,张桐嘉
(沈阳农业大学工程学院, 辽宁 沈阳 110866)
保护性耕作的关键是免耕播种技术,免耕播种机是保护性耕作机具的重点和难点。免耕播种机与普通播种机的不同主要表现在作业条件差,地表残茬、秸秆、杂草覆盖,土壤坚硬,垄形不整,造成播种机易壅堵、播种深度不易把握等[1-3]。它不仅需要具备普通播种机的性能,还要能够在地表有前茬作物根茬或秸秆覆盖的情况下实现免耕播种。播种深度受到地表不平度及土壤阻力的影响,播种深度变化是一个动态过程。鉴于国内外对机械免耕播种仿形加载机构的工作机理与参数优化基础理论,尤其是动态过程理论,缺乏系统性的研究[4-7],为了提高免耕施肥播种的质量,除了进行必要的破茬防堵外,还必须考虑免耕施肥播种机的仿形性能,即在地表不平条件下保持播种深度一致的能力[8-9]。为保证播种深度稳定,系统研究播种深度变化的动态过程,在对2BG-2型玉米垄作免耕播种机进行改进基础上,本文开展新型仿形加载机构的研究,建立免耕播种机纵向铅垂面微振动动态模型,优化设计免耕播种机的结构,为控制免耕播种作业质量和性能改进奠定理论基础。
1 2BG-2型玉米垄作免耕播种机简介
2BG-2型玉米垄作免耕播种机总体结构,如图1所示。整机由挂接机构、四连杆机构、破茬机构、施肥机构、播种机构、压种机构、镇压机构和机架等组成。整机长1 550 mm,工作幅宽1 300 mm(垄距600 mm),宽1 700 mm,质量465 kg,播种两行。配套动力:18.3 kW以上轮式拖拉机。2BG-2型玉米垄作免耕播种机结构质量为465 kg,与目前东北普遍使用的2BMZF-2型免耕指夹式精量施肥播种机采用1 000 kg的整机质量相比[10-15],结构质量减少一半,在辽宁省各种土壤条件下进行试验,均可达到破茬、防堵、入土能力的要求。但是,2BG-2型机型采用滚动缺口单圆盘作为破茬装置,开沟较窄,破茬刀阻力较大。为此研发了阿基米德螺线型破茬犁刀组成的切拨防堵装置,以减小工作阻力,加大开沟宽度满足农业技术要求;并研发加装弹簧和阻尼器复合体的新型仿形机构,保持整机对土壤的下压力的需求。

1.万向节;2.机架;3.风机;4.肥料箱;5.种箱;6.覆土镇压机构;7.地轮机构;8.切拨防堵装置;9.双圆盘施肥开沟器;10.破茬装置
1.universal joint; 2.frame; 3.fan; 4.fertilizer box; 5.seed box; 6.soil covering and repression device; 7.land wheel mechanism; 8.anti-blocking; 9.double disc fertilizing furrow opener; 10.residue cutting device
图1 2BG-2型玉米垄作免耕播种机总体结构
Fig.1 General structure of type 2BG-2 corn ridge and no-till planter
2 免耕播种机的动态模拟
2.1 免耕播种机两种不同仿形加载机构
两种仿形加载机构结构如图2所示。2BG-2型玉米垄作免耕播种机改进前的机构是在四连杆机构上安装压力弹簧,弹簧刚度系数为16 N·mm-1,通过丝杠调节来改变弹簧的工作长度,而改变其压力大小。改进后的机构则是在四连杆机构上加装弹簧和阻尼器的复合体,弹簧刚度系数k约为20 N·mm-1。
田间试验于2015年11月16日,在沈阳农业大学试验田玉米留茬地进行,试验地块平均垄距为60 cm,垄高为7 cm,垄台宽27 cm,沟底宽16 cm,平均株距为30 cm,玉米残茬平均高度为15 cm,土壤平均含水率为16.5%,土壤紧实度15 cm处平均为1.97 MPa。由东方红354型拖拉机悬挂连接,试验装置连接如图3所示。为对比研究,将原仿形加载机构和新型仿形加载机构安装在同一免耕播种机机架上[16]。


图2 两种仿形加载机构 Fig.2 Two kinds of profile loading mechanism
1.笔记本电脑;2.数据采集卡;3.蓄电池;4.倾角传感器;5.直线位移传感器
1.computer; 2.data acquisition; 3.storage battery; 4.angular displacement sensor; 5.linear displacement transducer
图3 试验装置安装图
Fig.3 Completed installation of the tested apparatus
2.2 时域分析
安装两种不同仿形加载机构的免耕播种单体,在5 km·h-1速度下的开沟深度变化和弹簧形变量的时间历程曲线如图4、图5所示。
对图4和图5中2种情况下开沟深度和弹簧形变量的时域曲线数据进行统计、计算和分析,得到试验数据的统计结果如表1所示。


图4 原仿形加载机构开沟深度与弹簧形变量时间历程曲线 Fig.4 Time course curve of trenching depth and spring deformation for original profile loading mechanism

图5 新型仿形加载机构开沟深度 与弹簧形变量时间历程曲线 Fig.5 Time history curve of trenching depth and spring deformation for new profile loading mechanism表1 两种不同仿形加载机构试验结果 Table 1 Test results of two kinds profile loading mechanism
由表1分析可得,新型仿形加载机构的弹簧形变量与变异系数均较原仿形加载机构的小,开沟深度的变异系数也较原仿形加载机构的小,可见在田间作业时,安装新型仿形加载机构的免耕播种单体工作性能更稳定,开沟深度的一致性得到保证,利于种子的发芽以及苗期生长。由不同工况下开沟深度和弹簧形变量的时间历程曲线,可以求出信号的自相关函数以及两个信号的互相关函数如图6、图7所示[17-18]。随机信号在原点处有较大相关性,随延迟时间的增长相关性变弱,曲线此后呈现出周期性,并且可以看到曲线相对于该轴衰减振动,曲线的这种历程特性证明系统工作过程中具有隐匿的周期性分量。
2.3 谱密度分析
为了进一步研究不同仿形加载机构、不同作业速度下的田间工作性能,可对各参数的时间历程曲线进行谱密度分析。开沟深度作为输入和弹簧形变量作为输出的动态响应自谱密度曲线如图8、图9所示。
由图8分析可知,开沟深度、弹簧形变量自谱密度曲线以及开沟深度与弹簧形变量的互谱密度曲线相似,各峰值处对应的频率值基本一致。试验用播种开沟器外径为D=350 mm,转动一周移动的距离为l=π×D=3.14×0.35≈1.1 m,机具的作业速度为1.38 m·s-1,则沿前进速度方向上转动一周所用的时间为t=1.1/1.38≈0.797 s,产生的振动频率为1.35 Hz,则1点(1.35 Hz)处出现的峰值是播种开沟器振动引起的。同理可知:图8中2点(8.26 Hz)处出现的峰值是由半圆缺口破茬盘振动引起的;图8中3点处出现的峰值是由施肥开沟器振动引起的;图8中4点处出现的峰值是由清垄器振动引起的。另外振动频率在2 Hz与3 Hz处开沟深度、弹簧形变量自谱均出现过极值,应该为地表不平度或者土壤非匀质造成的土壤阻力波动引起的。比较输入输出自谱曲线可得,输出的频带宽度较输入的频带宽度大,说明系统不稳定。

图6 原仿形加载机构的自相关与互相关函数曲线
Fig.6 Auto-and cross-correlation functions curve of original of profile loading mechanism
由图9分析可知,开沟深度、弹簧形变量自谱密度曲线以及开沟深度与弹簧形变量的互谱密度曲线在1′、2′、3′和4′点处出现峰值原因同图8中1、2、3和4处相同。振动频率在0.67 Hz与1.67 Hz处开沟深度、弹簧形变量自谱曲线均出现过峰值,应该是由地表不平度或者土壤非匀质造成的土壤阻力波动引起的。由下文可知此时系统的固有频率为3.57 Hz,则3.57 Hz处出现的峰值应为系统固有频率引起的。另外输入、输出自谱和互谱密度曲线相似,各峰值处对应的频率值基本一致,且输出的频带宽度较输入的频带宽度没有加大,说明该动态系统比较稳定,装置结构设计合理。

图7 新型仿形加载机构自相关与互相关函数曲线
Fig.7 Auto-and cross-correlation functions curve of new of profile loading mechanism
对比图8和图9可知,原仿形加载机构的免耕播种单体的输出频带主要集中在0~15 Hz,新型仿形加载机构免耕播种单体的输出频带约在0~6 Hz之间,说明田间作业时,输入经过新型仿形加载机构后输出信号的高频成分被过滤掉,更利于免耕播种机系统的稳定工作,新型仿形机构设计合理。新型仿形加载机构通过安装辅助阻尼元件可以降低开沟器工作时的振动性能,利于保持播种深度的稳定性。
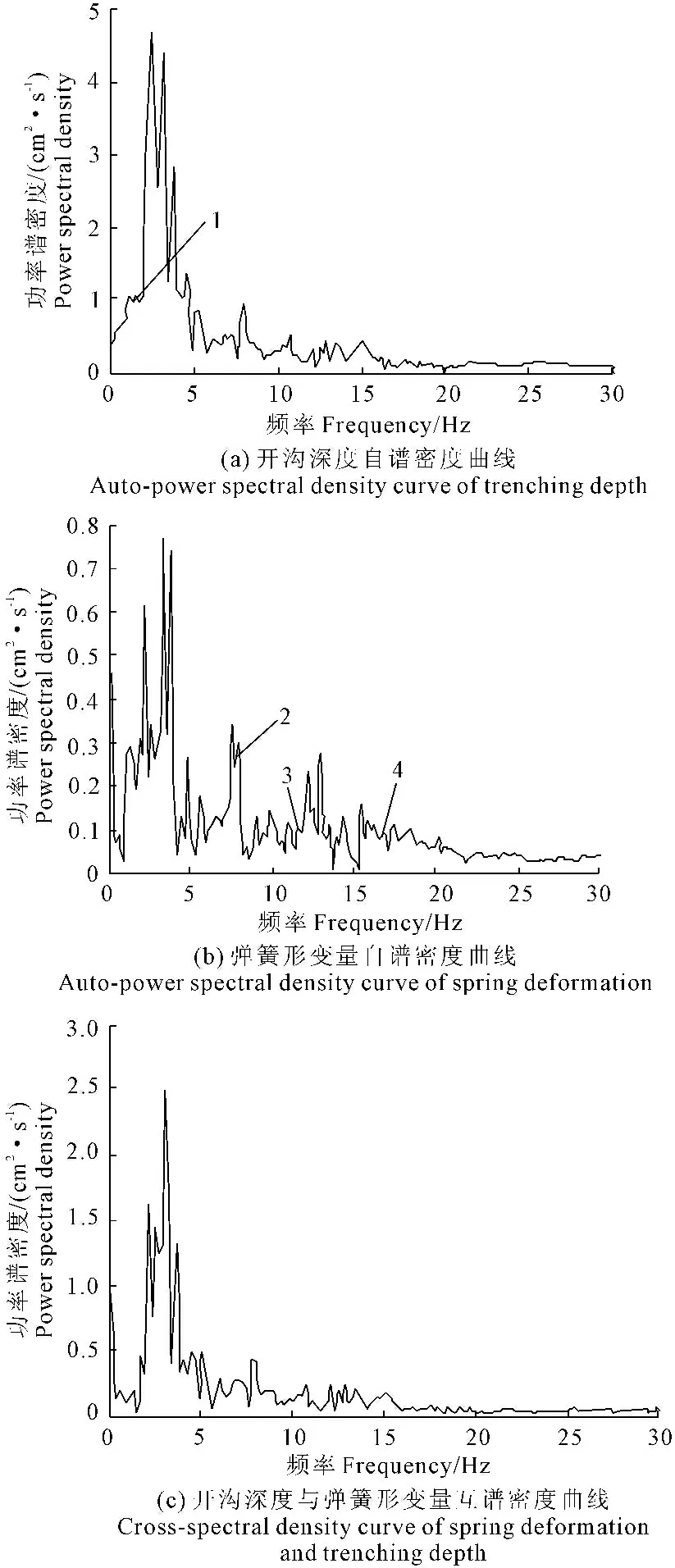
图8 原仿形加载机构开沟深度与弹簧形 变量功率谱密度曲线
Fig.8 Power spectral density curve of trenching depth and spring deformation for original profile loading mechanism
2.4 免耕播种传递函数的建立
免耕播种机械是较为复杂的动态系统,根据免耕播种机系统正常工作时的动态运动过程,以开沟深度x(t)作为输入,弹簧形变量P(t)作为输出的传递函数[19]:
(1)
式中,K—放大系数;τ、T1、T2为时间常数。

图9 新型仿形加载机构开沟深度与弹簧形 变量功率谱密度曲线
Fig.9Powerspectraldensitycurveoftrenchingdepthandspringdeformationfornewprofileloadingmechanism
且有如下公式:
SPX(ω)=G(jω)SX(ω)
(2)
(3)
式中,SX(ω)为开沟深度和弹簧形变量的自谱密度;SPX(ω)为开沟深度和弹簧形变量的互谱密度;A(ω)为系统的幅频特性;G(jω)为系统的频率特性。
由图7、图8和图9中确定输入自谱密度SX(ω)、输出自谱密度SP(ω)和互谱密度SPX(ω),得出不同工况下的A(ω)值。对于平稳随机过程,A(ω)又有如下表示形式:
(4)
式中,c1=T24,c2=T12-2T22,d=τ2。
可以由试验结果计算出K,c1,c2,d,从而求出T1,T2,τ。计算结果如表2所示。

表2 开沟深度和弹簧形变量传递函数系数值Table 2 Stubble breaking depth and spring deformation transfer function coefficient value
由表2可知,在田间作业条件下,相对于原仿形加载机构的单体而言,新型仿形加载机构的播种单体开沟器的振动性能减小,提高了开沟深度的稳定性,进而改善了播种深度的稳定性,证明新型仿形加载机构的设计合理。
将表2中数据代入式(5)、式(6),可分别求得相同工况下,开沟深度作为输入、弹簧形变量作为输出的传递函数表达式。
原仿形加载机构系统的传递函数(5km·h-1)为:
(5)
新型仿形加载机构系统的传递函数(5 km·h-1)为:
(6)
2.5 基于Matlab/Simulink的免耕播种机系统单位阶跃响应分析
当系统受到某种输入作用后输出变量的变化情况可以表征系统的性能。系统针对不同的输入信号,响应不同。外作用信号具有随机性质,常采用一些典型信号作为系统的输入,对免耕播种机系统良好的设计应该是对系统输入的瞬态响应快速、稳定、和准确。本文讨论系统在单位阶跃函数作用下的瞬态响应。系统实际输出的单位阶跃响应曲线如图10所示。
利用Matlab软件中Simulink对免耕播种机动态系统进行多域建模[20]。根据前面建立的加装两种不同仿形加载机构的免耕播种系统(5km·h-1)的传递函数模型,打开SimulinkLibrary,设置好各模块的属性,正确连接各模块,采用0.01s固定步长,搭建起系统的仿真模型,如图11所示。然后运行,获得系统传递函数的单位阶跃响应曲线,如图12所示。
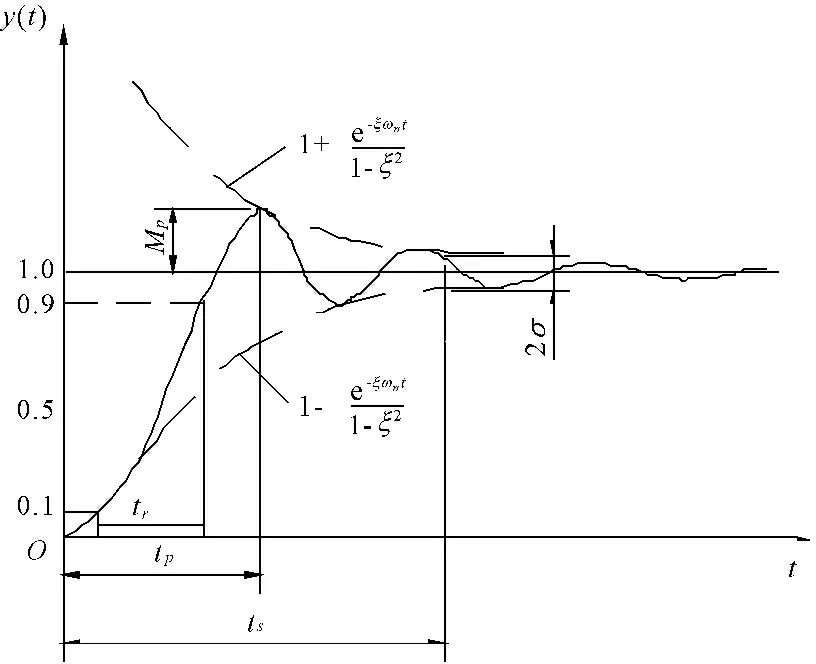
注:tr-上升时间;tp-峰值时间;ts-响应时间;MP-超调量;2σ-允许误差。
Note:tr-rise time;tp-peak time;ts-response time;MP-overshoot volume;2σ-allowable deviation

图10 二阶系统单位阶跃响应曲线 Fig.10 Unit step response curve of second-order system

图11 免耕播种机系统仿真模型 Fig.11 Simulation model of the system

图12 系统传递函数的单位阶跃响应曲线 Fig.12 Unit step response curve of the transfer function of the system表3 开沟深度与弹簧形变量瞬态响应性能指标 Table 3 Transient response performance index of trenching depth and spring length variation
由表3分析可知,新型仿形加装机构的免耕播种机系统与加装原仿形加载机构的免耕播种机系统相比,系统上升时间与峰值时间略微增加,但是系统响应时间与最大超调量分别减少18%、32%,系统响应震荡弱,系统平稳性好。
3 结 论
1) 通过对加装两种不同仿形加载机构的免耕播种开沟深度和弹簧形变量时域分析,可得作业速度为5 km·h-1时,新型仿形加载机构的弹簧形变量均值与变异系数分别为0.26 cm、38.5%,原仿形加载机构的弹簧形变量均值与变异系数分别为0.32 cm、40.6%,利于免耕播种单体系统的稳定工作。
2) 通过建立加装新型仿形加载机构免耕播种机的传递函数,分析得到加装新型形机构的免耕播种机系统为欠阻尼衰减振动系统,阻尼比为0.62,开沟深度稳定性提高;系统响应时间与最大超调量分别减少18%、32%,系统响应震荡弱,系统平稳性好。
[1] 林 静.农田保护性耕作技术与机具[M].北京:金盾出版社,2016,3:118-262.
[2] 董 智,邓林军,董 俊,等.免耕农业在辽西风沙半干旱区的机遇与挑战[J].辽宁农业科学,2016,(2):48-50.
[3] 王跃勇,王利斌,张维安,等.长春地区免耕播种机的现状和建议[J].农机化研究.2016,2:264-268.
[4] Magalhaes P S G, Bianchim A, Braunbeck O A. Simulated and experimental analyses of a toothed rolling coulter for cutting crop residues[J]. Biosystems Engineering, 2007,96(2):193-200.
[5] Gratton J, Chen Y, Tessier S. Pinciples of Farm Machineery. Design of a spring-loaded downforce system for a no-till seed opener[J]. Canadian Biosystem Engineering,2003,45(2):29-35.
[6] Mouazen A M, Anthonis J, Saeys W, et al. An automatic depth control system for on-line measurement of spatial variation in soil compaction, part 1: sensor design for measurement of frame height variation from soil surface[J]. Biosystems Engineering, 2004,89(2):139-150.
[7] Anthonis J, Mouazen A M, Saeys W, et al. An automatic depth control system for online measurement of spatial variation in soil compaction, part 3: design of depth control system[J]. Biosystems Engineering , 2004,89(1):59-67.
[8] 赵金辉,刘立晶,杨学军,等.播种机开沟深度控制系统的设计与室内试验[J].农业工程学报,2015,31(6):35-41.
[9] 黄东岩,朱龙图,贾洪雷,等.基于压电薄膜的免耕播种机播种深度控制系统[J]. 农业机械学报,2015,27(10):11-16.
[10] 王庆杰,何 进,梁忠辉,等.东北地区玉米垄作免耕播种机研究现状[C]//中国农业工程学会2011年学术年会.北京:中国农业工程学会,2011.
[11] 林 静,刘安东,李宝筏,等.2BG-2型玉米垄作免耕播种机[J].农业机械学报,2011,42(6):43-46.
[12] Grisso R B, Holshouser D, Pitman R. Planter/drill considerations for conservation tillage systems[R]. Virginia: Virginia cooperative Extension,2007.
[13] 高焕文,李洪文,姚宗路.我国轻型免耕播种机研究[J].农业机械学报,2008,39(4):78-82.
[14] 李宏哲,林 静,李宝筏.免耕播种机在辽宁铁岭县的适应性研究[J].农机化研究,2014,36(8):49-51.
[15] 李 博.免耕播种机新型破茬开沟装置的设计与试验研究[D].沈阳:沈阳农业大学,2013.
[16] 钱 巍.东北垄作免耕播种机关键部件研究与整机设计[D].沈阳:沈阳农业大学,2016.
[17] 杨叔子,杨克冲.机械工程控制基础[M].武汉:华中理工大学出版社,1996.
[18] 卢文祥,杜润生.工程测试与信息处理[M].武汉:华中理工大学出版社,1995.
[19] А.Б.卢里耶,А.А.格罗姆勃切夫斯基.农业机械的设计和计算[M].北京:中国农业机械出版社,1983.
[20] 赵广元.MATLAB与控制系统仿真实践[M].北京:北京航空航天大学出版社,2012:115-120.