陆军合同战斗方案仿真实验自动控制研究
2018-03-19申天良王永峰王春雷
李 策, 申天良, 彭 勇, 王永峰, 王春雷
(陆军步兵学院, 河北 石家庄 050083)
1 引言
仿真实验是评估优化陆军合同战斗方案的信息化手段,其中,基于自动控制的仿真实验是验证陆军合同战斗方案的重要方式,具有决定性影响。本文结合多年的战斗方案仿真实验理论与实践研究成功经验,提出了基于决策点的陆军合同战斗方案仿真实验自动控制方法,实现了陆军合同战斗方案的自动仿真。
1.1 仿真实验自动控制面临的困难
战斗方案仿真实验是在可控制、可测量、可分析环境下,控制虚拟战斗发生、发展和变化,并通过观察以获得虚拟作战事实的实践活动。实验控制是虚拟战斗实施过程中,建立和维护仿真运算秩序的技术方法和途径。
仿真实验控制有两种主要形式。一种是手工控制,即仿真计算过程中由人根据战场态势演变,随机决策且输入指令控制仿真计算进程。这种方式的长处是能够充分发挥人的智能优势,不足之处在于受人主观影响较大,客观性、稳定性相对较弱;另一种是自动控制,仿真计算开始前,人把各种可能行动方案按照一定的规则输入系统当中,整个仿真计算过程不需要人的干预,控制系统自动完成仿真计算。自动控制的长处是便于进行大样本空间的仿真,并进行数据的统计分析和产生新的知识。
仿真实验自动控制面临的主要困难在于需要不断地根据战场态势变化,自动产生驱动对抗双方实体的行动指令,控制仿真模型模拟行动过程和效果。国内外针对战斗方案仿真实验自动控制问题展开了大量研究,提出了诸如基于复杂适应系统理论的Agent建模、基于指挥控制理论的指挥控制建模等技术途径,但由于这些技术方法难以满足陆军合同战斗方案自动仿真的需求,其解决实际问题的能力、军事人员认可度和推广运用等方面受到极大限制。
1.2 基于决策点的自动控制方法
针对目前仿真实验自动控制面临的困难,本文提出了基于决策点的自动控制方法。所谓决策点是指需要指挥员在特定的战场态势下,必须做出行动决策的时间点、空间点和事件触发点等。例如,在部队在开进出发地域是否可以出发的决策中,开进计划规定的出发时刻是指挥员进行决策的关键因素。那么,计划规定的出发时刻即为时间决策点。部队是否发起冲击首先取决于其是否到达冲击地线,如果按时到达冲击出发地线应及时发起冲击,反之,需要继续等待。那么,规定的冲击出发线即为空间决策点。当守方发起反冲击时,攻方应抗击敌反冲击,那么守方实施反冲击即为攻方反冲击行动的事件决策点。
基于决策点自动控制就是把决策点和行动方案预置在作战实体行动过程中的各个环节,由自动控制模型根据预置决策点和行动方案控制仿真计算自动运行。指挥员对作战过程设计和预想,用决策点的方式体现指挥控制行动,并融入作战行动方案中,代理指挥员控制指令的产生和下达,实现方案的自动仿真,从而充分发挥人的判断能力和机器的计算优势,避免构建复杂的知识库及由此引起的仿真过程的可信性等问题。
2 决策点设计
决策点是可能导致作战进程发生重大变化,促使指挥员必需做出行动决策的特定战场态势中的时间、空间或事件要素。它是构想作战实施过程中的必需元素,是各兵种组织协同行动的主要依据,通常由指挥员依据作战原则和经验确定。
2.1 决策点设计原则
2.1.1 客观性原则
客观性原则是指要符合本身力量资源大小、战场环境和一般战术规律等客观实际条件和原则。力量资源大小决定了本身客观的进攻和防御能力,战场环境客观制约了能力的发挥,战术规律约束着一定条件下的能力的客观运用方式。贯彻这一设计原则,要求主观能动性的发挥必须以客观条件为基础,必须因地制宜、量敌用兵。
2.1.2 略敌从宽原则
略敌从宽原则是指立足对强敌作战,重视战术行动细节,对敌人的能力、行动方式以及主观能动性的发挥等方面尽量不加限制。按照博弈论的思想,设想给予敌方更多的行动自由,使己方处于不利位置来寻找最佳应对措施,确保形成一个完备稳定的作战方案。贯彻这一设计原则,要求思想上必须重视对手思维上的灵活性、应对策略上注重细节处理、行动协同上形成整体效果。
2.1.3 连贯性原则
连贯性原则是指决策点之间存在着一定的关联关系,在时空整体上要形成一个从前到后的链路。连贯性明确了为达到最终态势,需要进行中间过程控制的一系列应对措施。贯彻这一设计原则,要求行动的整体安排与局部安排结合、节点的紧前行动与紧后行动结合,从而控制作战进程向预想态势演进。
2.2 决策点分类
决策点按照不同的分类方法,可分为不同的类型。按照战斗类型,决策点可分为进攻类决策点和防御类决策点。按照战斗样式,可分为阵地进攻战斗类决策点、阵地防御战斗类决策点等类型。不同的战斗类型和战斗样式,决策点的类型不尽相同,但有一些基本决策点。基本决策点是按照作战条令和战术原则抽象的通用性决策点。按照特征属性,决策点可分为时刻类决策点、空间类决策点、事件类决策点和状态类决策点。每种决策点类型又包含若干个具体的决策点。譬如,空间类决策点包括我进至、敌进至、我退至、敌退至等决策点;事件类决策点包括发起攻击、实施火力突击、实施机降、实施反机降、实施反冲击、停止攻击等决策点。
2.3 决策点表达
决策点的结构主要描述其构成的要素和关系,令S1为作战阶段集合,S2为敌情况预想集合,S3为我情况预想集合,D为决策点集合,则映射:f:S=S1×S2×S3→D定义了某次战斗的一组决策点,S构成了条件集合。决策点的发生一定具备某个特定的条件,同时该条件也描述了主要的态势要素。条件的构成要素与决策点类似,不在单独描述。
决策点由实体(属性)、军事术语、逻辑谓词、变量和自由文本字符串等基本元素组成。其中实体(属性)是仿真中区分的小分辨率单位,包括兵力实体和环境实体,属性是实体所具有的特征值;军事术语是军事上定义明确的战术术语;逻辑谓词包括 “与”和“或”;变量主要包括坐标、线段、多变形区域、时刻、整数和浮点型数据等;自由文本字符串是为了衔接其前后要素形成语句而随机添加的文本。
各要素之间的关系模板如下:
{【实体】*[自由文本]*<军事术语>*[自由文本]*(变量)* [自由文本]}*{【实体(属性)】*[自由文本] *<军事术语>*[自由文本]*(变量)* [自由文本]}+。
其中,
{}中内容表示一个含义明确的描述语句且仅必须含有一个变量;
【】中内容表示实体或具有某类性质的实体;
[]中内容表示随机增加的字符串;
()中内容表示必须是某种变量;
<> 中内容提供从军事术语集中选择项;
* 表示连接其前后的逻辑关系,逻辑“或”用“|”,不注明时为逻辑“与”;
+ 表示可重复一次或多次。
例如,“抗击敌反冲击”决策点的表达方式为:
{[当敌向](地点坐标)[方向]<实施反击>}{[,且其兵力](小于)|(大于)(数值)[连时][以]【战斗实体名称)】[为主]<消灭|抗击>[反击之敌]}。
3 基于决策点的作战方案构成
作战方案的构成要满足四个要求:一是设计上便于军事人员和技术人员的理解交互;二是仿真使用上便于转换成控制数据结构;三是功能上便于多种形式表现;四是评估上便于提供必要的条件数据。遵循简便易行的原则,最终形成数据化方案的目标,本文提出如下的作战方案构成方法。
3.1 建立全局要素层次结构
依据作战条令和相关战术教材对决心方案和作战计划的表述内容要求,从中提取出军事短语和术语,按照树形层次进行组织,从而在整体上形成作战方案的要素结构。表1是进攻战斗方案部分要素的层次结构示意表。
3.2 确定方案要素的关联关系
确定关联关系是指确定要素间的依赖关系,元素B依赖元素A表明B依赖A产生的数据。确定依赖关系通常依据其要素所包含的内容信息和作战筹划的工作步骤。建立完整的要素依赖关系图,可为后续作战方案要素输入流程以及数据模型主键和外键的设计奠定基础。图1是使用IDEF1X语法确定的一个开进展开方案依赖示例。
3.3 设计方案要素的表格方式
表格方式是一种最常用和通俗易懂的表现方式,方案要素的表格方式就是对方案要素再进行细分,直到成为含义单一的信息元素。表格中的表头字段表示这些信息元素并注明其获取方式。按照分解的过程可划分为两种形式。
1)单一式
单一式是可直接表现用表格表示,如表2的重点打击目标的格式。其中手工输入是指需要在文本输入框内输入字符串,选择输入是从下拉列表中选择其中一项或多项输入,图上确定是指在地图上用鼠标点击输入,自动匹配输入是根据前面选择输入项自动关联输入。
2)关联式
关联式是需要引用其他表中的信息元素,反映了他们之间的先后关系和依赖性。表3是各阶段决策点表需要依赖作战阶段划分表。

表2 重点打击目标表
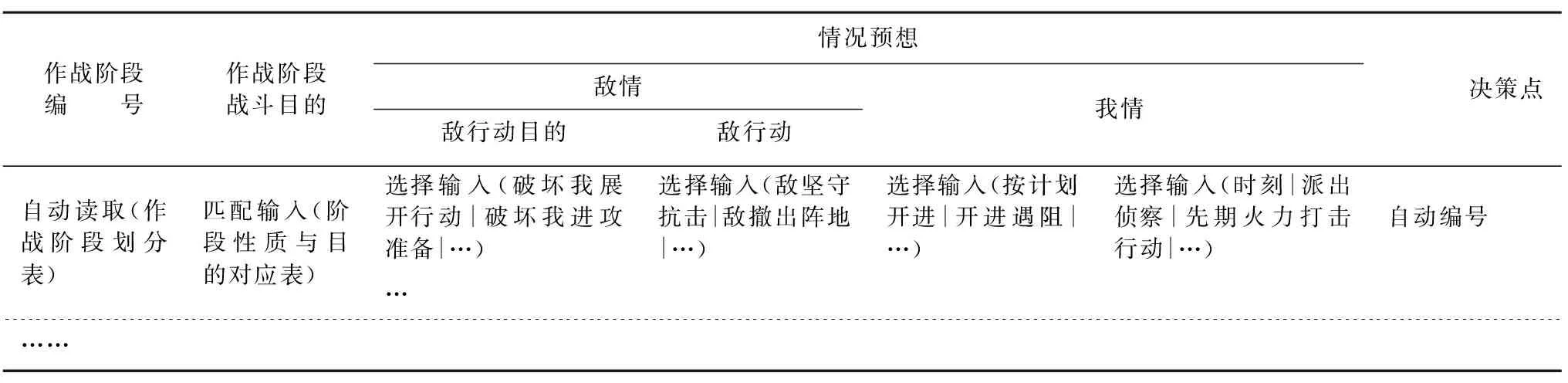
表3 各阶段决策点表
4 仿真自动控制框架
4.1 自动控制框架
自动控制框架描述控制的整体结构,主要由数据化的作战方案、自动控制规则、仿真环境、仿真模型、态势显示、交互关系等组成,如图2所示,其中虚线部分描述是控制框架的辅助部分。其中:作战方案为仿真自动运行提供数据支持;自动控制规则为仿真自动运行提供规则支持;仿真模型(包括实体模型、自动控制模型和行动模型)为仿真自动运行提供模型支持;仿真环境为方案数据和自动控制规则的加载、仿真模型的调度以及仿真时间的推进等提供服务;仿真运行中产生的实验数据可以转化为态势数据进行输出显示;红蓝双方通过各种作战行动进行对抗。控制框架内各组成部分之间除了具有以上的显性作用关系,还存在以下几种内隐的作用关系。
自动控制模型与作战方案之间的“数据—模型”驱动关系。在仿真过程中,方案数据将驱动自动控制模型产生作战指令,进而控制作战行动的模拟仿真。因此,用于驱动自动控制模型运行的方案数据在数据结构上需要与自动控制模型的参数结构相匹配,才能完成方案数据的仿真映射。
自动控制模型与自动控制规则之间的“模型—规则”的调用关系。在仿真过程中,规则是模型运行的触发器,由模型通过接口调用相应的规则对各种事件进行处置。规则在一定程度上决定模型该做什么和如何做。
作战方案和自动控制规则之间的“数据—规则”转化关系。在仿真过程中,有些方案数据可以转化为规则使用。比如,方案中的预想情况数据包含了“在何种情况下采取何种行动处置”的描述,在仿真过程中可以转化为指挥实体的决策规则,供指挥实体决策使用。
4.2 运行机制
仿真运行中,决策点由指挥实体负责模拟,它实时感知、判断当前的战场态势,并结合作战规则,与预想的作战情况进行匹配,若匹配成功则触发针对该情况制定的一系列实体行动方案并将方案内容自动转换为相应的一组作战指令直接下发给行动实体,并监控行动实体的行动过程;行动实体接到作战指令后,结合自身状态和战术原则,判断有无执行的条件,如有则将作战指令进一步解析为行动序列,驱动相应的行动模型模拟作战行动,并在作战过程中按照控制规则自主地处置一些简单的突发情况;行动实体将作战情况和结果报告给指挥实体,作为指挥实体下一步指挥决策的依据;如此循环往复,直至模拟结束。如图3所示为自动控制的运行机制图。
指挥实体与行动实体之间通过作战指令和情况报告进行交互。作战指令可以看作是行动实体的命令式任务,这些命令式任务来源于合同战斗方案中的行动方案,是行动实体执行作战行动的主要依据。但行动方案中一般不会包含对一些突发或临时情况的处置,如遇障、遇袭等,可以把这些情况称为行动实体的自主式任务,这些任务只能依靠行动实体的行动控制规则来自主决定应该采取哪些行动。
5 仿真自动控制实例
本文一个简化的陆军机步旅进攻战斗方案,基于上述自动控制原理研制的“陆军合同战斗实验系统”进行验证。
5.1 基本想定
蓝军机步旅约1个机步营和1个战车营的兵力,在某地域组织防御,企图依托阵地,固守待援,阻红军向纵深发展进攻。
红方机步旅配属2个坦克营、2个加榴炮营、1个攻击直升机大队、1个高炮连以及通信、电抗和工程等保障力量。在上级联合作战力量的协同与支援下,采取“多路立体突击,分区割歼制要”战法,夺控防御地域内诸要点,攻歼敌蓝军旅。
5.2 作战方案决策点设置
1)“发起攻击”决策点行动
左翼攻击群左翼连担负主攻任务,采取乘车冲击方式,在火力掩护下,迅速通过通路,向一线排阵地内重点目标实施打击。穿插分队在左翼攻击群后通过通路,沿翼侧向纵深的敌指挥所实施穿插。机降战斗队在敌纵深有利地形实施机降,迅速收拢队形,破袭敌纵深战术指挥所。
2)“抗击敌反冲击”决策点行动
当蓝方预备队实施反冲击之时,炮兵群122榴弹炮营对反冲击之敌进行拦阻射击,在反冲击路线上设置2道火力拦阻线,持续射击5分钟,使用弹药为爆破榴弹2个炮标准,打击迟滞反冲击之敌,支援抗反分队战斗。障碍设置队在敌反冲击路线和展开地区快速机动布雷,迟滞反冲击之敌行动。
3)“歼灭被围之敌”决策点行动
蓝方纵深防守力量,依托要点顽强抗击,并从后方向前机动约1个连的兵力,对纵深要点阵地实施机动增援。红方纵深攻击群在空地火力和前沿攻击群部分力量协同下,对纵深防守之敌展开攻击,夺控纵深要点阵地。机动炮队对机动增援之敌实施拦阻射击。
5.3 仿真过程
1)实体初始态势
战斗方案仿真开始时红蓝双方实体初始位置及状态如图4所示。从图4可以看出,方案模拟开始前,蓝方正依托阵地,组织防御。红方各攻击群队已占领进攻出发阵地。
2)前沿突破
仿真开始后,红方各攻击群队按照预定的作战计划,向冲击出发阵地机动。当到达冲击出发时间时,“发起冲击”决策点触发,红方前沿攻击实体向蓝方前沿防守之敌发起冲击。图5是执行“发起攻击”后的态势图。
3)抗敌反冲击
当模拟至红方攻击蓝方纵深防守之敌时,红方预备队进行反冲击行动,触发红方设置的“抗击敌反冲击”决策点,图6是执行“抗击敌反冲击”决策点后的行动态势图,从图中可以看出,红方使用兵力建立对内对外正面,使用火力建立拦阻线,使用设障兵力设置障碍场,综合实施抗反行动。
4)歼灭被围之敌
图7是执行“歼灭被围之敌”的态势图。图中,蓝方纵深防守之敌已被红方包围,红方正在对被围之敌发起攻击,同时,综合运用兵、火、阵、障等手段,阻滞机动增援之敌。
6 结束语
本文针对仿真自动控制面临的困难,以决策点为核心概念,提出了基于决策点的自动控制方法,对决策点进行了详细设计,研究了基于决策点的作战方案构成,构建了仿真实验自动控制框架,并在“陆军合同战斗实验系统”中进行了技术实现,实现了陆军合同战斗方案仿真实验的自动控制。经过多年的实践运用,军事人员认为基于决策点的自动控制方法理念比较先进,能够较为全面地模拟战斗中的主要情况,并且方案的输入形式、仿真过程是可行的,对作战方案的数据化筹划、作战理论的定量研究以及大样本的仿真实验具有重要支撑作用。
[1] 刘卫国,等.数据化作战指挥研究[M].北京:解放军出版社,2012.
[2] 肖滨,孙永忠,衡军.作战想定的形式化表述方法研究[J].系统仿真学报,2008,20(11):2978-2981.
[3] 卜先锦,张德群.作战实验学教程[M].北京:军事科学出版社,2013.
[4] 岳秀清,张磊,别晓峰.外军指挥控制建模研究现状及启示[J].军事运筹与系统工程,2009,23(1):70-73.
[5] 彭勇,彭春光,龚建兴.作战管理语言研究综述[J].系统仿真学报,2009,21(17):5336-5339.
[6] 曹占广,于屏岗,王阔.基于决策点控制的作战方案并行仿真[J]. 系统仿真学报,2015,24(4):669-676.
[7] 刘祖煌,程启月.基于关键行动点的作战计划动态评估[J].火力与指挥控制,2011,36(12):5-7.
[8] 杨瑞平,黄晓冬.计算机生成兵力智能决策方法及其应用[M].北京:电子工业出版社,2011.
[9] Robert Siegfried,Alexander Laux,Martin Rother, Dieter Steinkam. Paper 12S-SIW-014 Scenarios in Military (distributed) Simulation Environments,Fall Simulation Interoperability Workshop,September, 2012.
[10] Peter Amstutz,Cortney Eldridge,Felicia Nguyen, Daniel Rice,Thomas Stanzione.Paper 13S-SIW-012 Reasoning, Planning, and Goal Seeking for Small Combat Unit Simulatio, Fall Simulation Interoperability Workshop,September 2013.
[11] 姜晓平,朱奕,伞冶.基于复杂系统的信息化作战仿真研究进展[J].计算机仿真,2014,31(2):8-13.
