一种基于单片机的智能玩具挖掘机
2018-03-15吴斌李文谨
吴斌 李文谨
【摘 要】本设计是以智能玩具挖掘机模型为控制对象,通过STC12C5A60S2单片机控制整个系统,HC-SR04超声波传感器作为检测模块,通过舵机控制挖斗,由单片机发出指令,使小车完成自动行驶、自动检测物体、自动挖掘的功能。
【关键词】单片机;挖掘机;智能
中图分类号: TP273.5 文献标识码: A 文章编号: 2095-2457(2018)01-0004-003
【Abstract】This design is based on intelligent toy excavator model for the control of the object, through the STC12C5A60S2 microcontroller to control the entire system, HC-SR04 ultrasonic sensor as a detection module, through the steering gear control bucket, issued by the microcontroller instruction, the car to complete automatic travel, automatic Detection of objects, automatic mining function.
【Key words】SCM; Excavator; Intelligence
隨着科技的迅猛进步,智能化电子产品已融入到生活的各个方面。在智能玩具领域,电子技术的发展使得玩具也越来越智能化,并成为一种新型的电子终端,也是世界玩具业发展的一个方向。由于智能玩具对儿童成长的重要性,加上智能玩具的技术是在对现有终端上技术的基础上进行创新,相对来说成本较低,因此,集计算机控制和电子技术于一体的智能玩具的研究越来越受到各界的广泛关注。
智能玩具中,智能小车类更加受到儿童的青睐。尤其是,随着传感技术、计算机科学、人工智能等相关学科的迅速发展,智能小车控制系统体现了以上学科的先进成果,成为具有实时决策与规划功能,环境的感知功能,行为的控制和执行等功能的综合体,是一种典型的机电一体化产品。
目前,常见的智能玩具小车除了利用遥控装置能实现前进、后退、左转、右转、停车等功能外,往往还通过光学传感器,语音识别装置等进行控制。本论文设计了一种基于单片机和超声波传感器的玩具挖掘机,通过软件编程来控制小车实现自动行驶、自动检测物体、自动挖掘等功能。
1 硬件电路设计
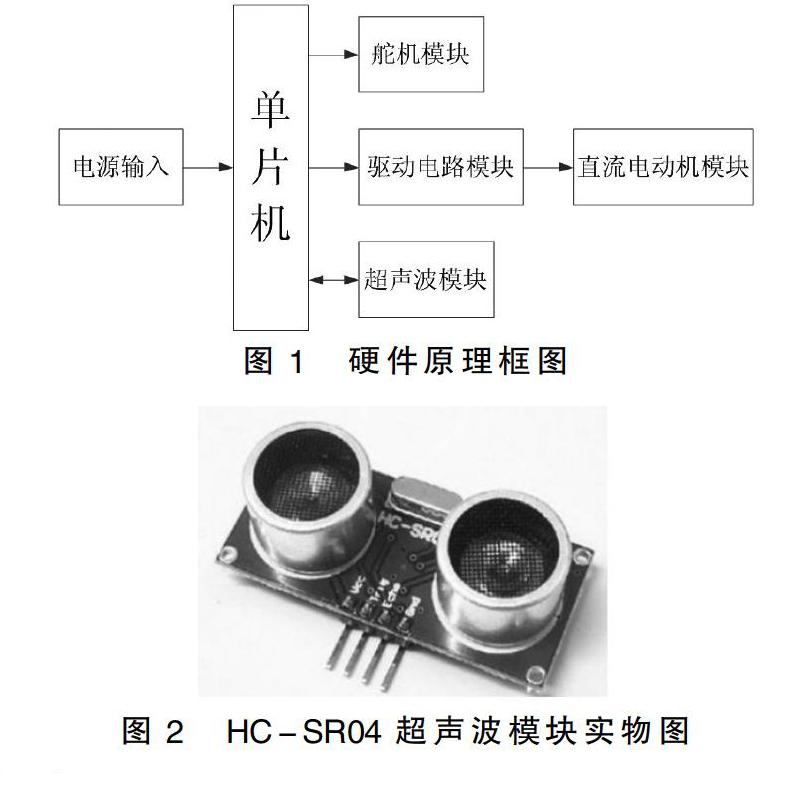
本论文设计的智能挖掘机由单片机最小系统板、超声波传感器、电机驱动模块、直流电机、舵机、电源开关构成。小车内部有4个电机,分别对应了小车的四个轮子;4个舵机,分别对应了机械臂的底盘、大臂、小臂和夹臂。设计通过软件编程,让小车独立完成自动行驶、自动检测物体、自动挖掘的过程。硬件部分的原理框图如图1。
1.1 单片机
本设计采用的主要控制芯片,在既考虑使用成本又考虑控制性能的基础上,采用宏晶科技生产的STC12C5A60S2单片机。这是一种单时钟/机器周期(1T)的新一代8051单片机,具有超强抗干扰、高速、低功耗等优点。不仅能够完全兼容传统的8051单片机的指令代码,而且速度上也能提高8-12倍。它的内部集成有MAX810专用复位电路,4路PWM,8路高速10位A/D转换,经常应用于电机控制及强干扰场合。
1.2 超声波模块
超声波波长短、频率高、绕射现象小,对固体、液体的穿透力很强,特别是具备能够定向传播、方向性好等特点。利用超声波的特性设计而成的传感器就是超声波传感器。它可提供一种非接触检测方案,检测范围既长又宽,被广泛应用于苛刻和复杂的工业环境中。本设计用到的超声波模块型号是HC-SR04,如图2所示。
其工作原理为:
(1)采用IO触发测距,给至少10us的高电平信号;
(2)可以自动地发送8个40khz的方波,自动检测是否有信号返回;
(3)若有信号返回,则通过IO输出一高电平,高电平持续的时间是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340米//秒)/2
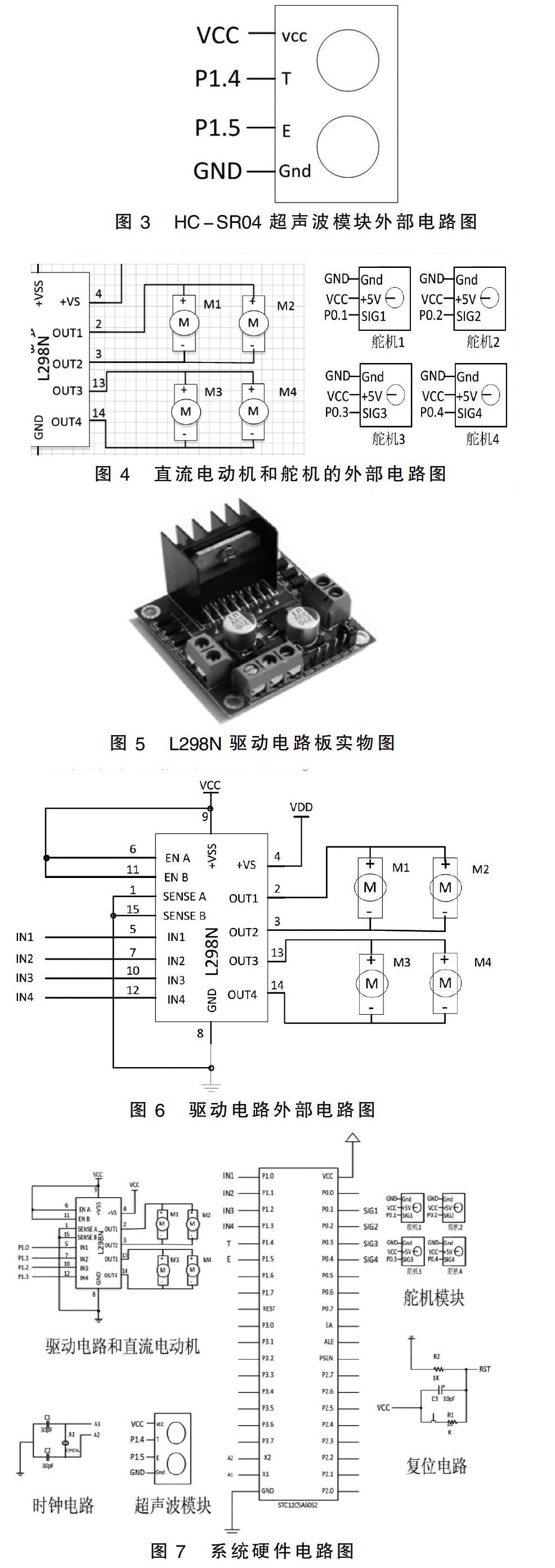
如图3所示为超声波模块外部电路图。其中T是发射端,E是接收端。
1.3 直流电动机和舵机
直流电动机具有速度调节特性好,调速方便、平滑、范围广,过载能力较强,能够实现制动、频繁快速以及逆向旋转的特点,适合作为本设计中玩具挖掘机的行驶动力。舵机具有体积小、响应速度较快、力矩大、外部机械设计简单且稳定性较高的特点,常作为智能车中转向的控制机构,适合控制本设计中挖掘机的机械臂工作状态。
本设计采用直流电动机用舵机控制挖掘机。采用的是有刷直流电动机和塑料材质的数字信号标准车模舵机9g。
为控制智能挖掘机行驶,采用4个直流电机分别控制小车的四个轮子,驱动玩具挖掘机前进、后退和转向,采用4个舵机,分别对应了机械臂的底盘、大臂、小臂和夹臂,控制挖掘角度和方向。
如图4所示为直流电动机和舵机的外部电路图。
1.4 驱动电路
驱动电路是主电路和控制电路之间的接口。在本设计中,单片机传过来的信号无法直接用于控制电机工作,因此,采用由SGS公司生产的直流电机驱动集成电路L298N,如图1.3所示。L298N为Multiwatt封装的15脚外观,内部有4通道逻辑驱动电路,能驱动两个直流电机或者一个两相步进电机。工作电压是46V,输出电压最高能达到50V,可以直接通过调节电源来控制输出电压;输出电流是2.5A,最大能达到4A,可以驱动电感性负载;也可以直接通过单片机的IO口提供信号;采用光电隔离,抗干扰能力强,而且电路相对较简单,使用非常方便。
如图5所示为L298N驱动电路板实物图。
本设计中四个轮子均安装了直流电机,因此分别将左前轮和左后轮、右前轮和右后轮并联在一起,用1块驱动电路板来驱动。
驱动外部电路图如图6所示。
2 软件部分设计
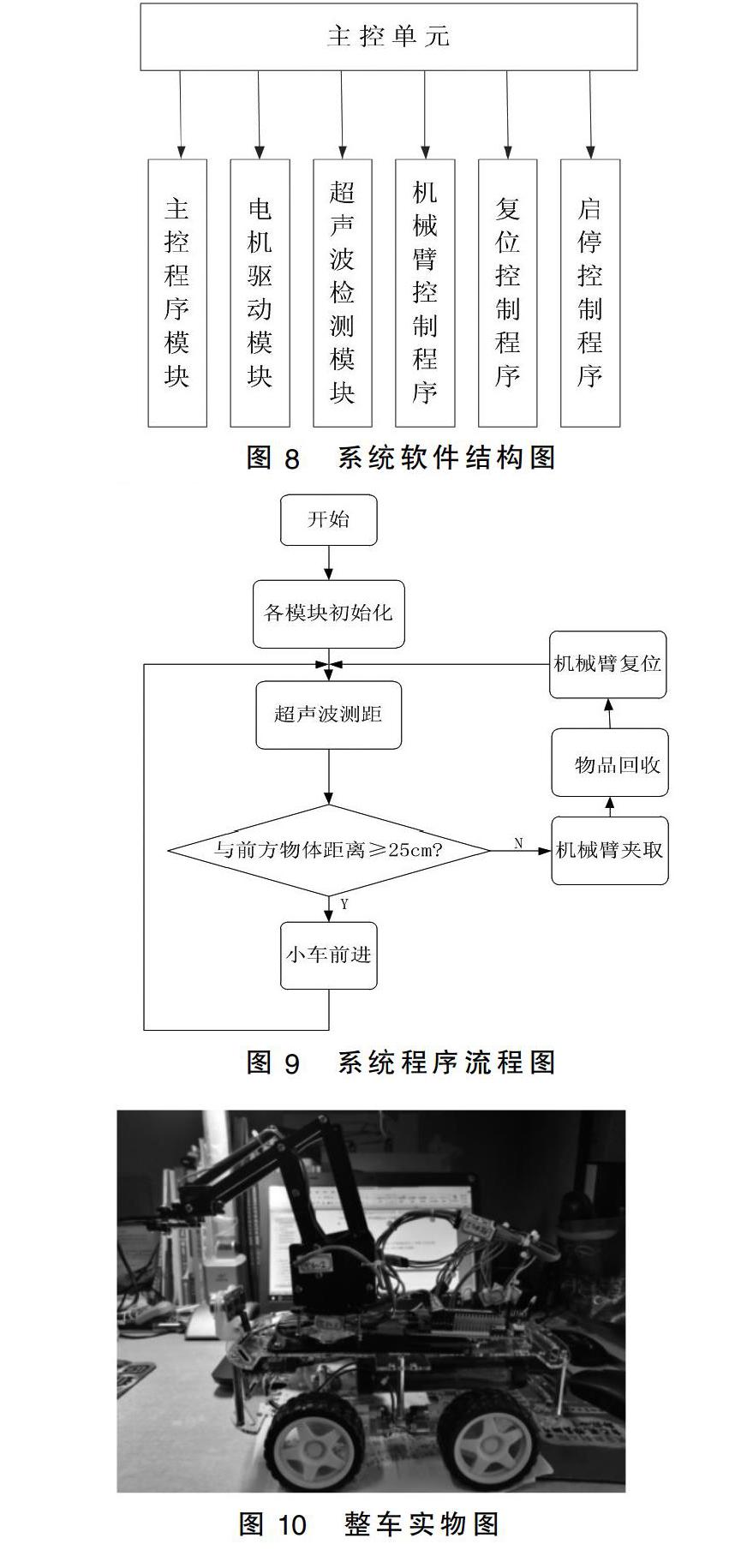
软件结构设计采用了模块化结构设计,由主程序模块、超声波检测模块﹑机械臂控制模块﹑电机驱动程序模块等构成。如图8所示为系统软件结构图。
2.1 軟件设计思路
首先主程序调用超声波测距子程序,超声波测距程序再调用微秒延时子程序,根据超声波检测到的结果,若检测距离在25cm之外,则调用小车前进子程序,同时超声波程序继续执行,继续调用微秒延时子程序;若检测距离在25cm以内,则调用小车停止子程序,不调用超声波测距子程序,调用机械臂夹取子程序,同时该程序调用毫秒延时子程序,该子程序执行完,调用小车前进子程序和超声波测距子程序,超声波测距程序调用微秒延时子程序,检测距离,根据检测结果来调用相应的子程序,如此循环往复。
图8 系统软件结构图
此程序中共有6个子程序,2个延时子程序,分别是微秒延时和毫秒延时,作用于超声波和舵机之间的动作;1个超声波测距子程序,作用与超声波超声波模块和前方物体;1个小车前进子程序,小车停止子程序,作用于小车;1个机械臂夹取子程序,作用于机械臂。
2.2 软件实现的效果
启动电源,超声波开始工作,有两种情况:(1)在25厘米的范围内检测不到物体,单片机给小车一个前进指令,小车向前行驶;小车在向前行驶的过程当中,超声波一直在检测,直到检测到前方有物体,这时单片机给机械臂一个夹取指令,机械臂开始夹取前方物体,夹取完毕后,单片机继续给下车一个前进指令,超声波继续检测,这样一直下去。(2)在25厘米的范围内检测到物体,单片机给小车一个停止指令,给机械臂一个夹取指令,机械臂开始夹取前方检测到的物体,夹取完毕后,单片机给小车一个前进指令,给超声波一个检测指令,这样周而复始。如图2.2所示为系统程序流程图。
3 整车调试
如图10所示为整车实物图。
3.1 调试过程中出现的问题
(1)舵机抖动,在调试机械臂进行一整套夹取动作的过程中,舵机出现严重的抖动情况,分解机械臂夹取动作,进行单个动作的时候又没有舵机抖动的情况出现;
(2)超声波检测物体不准确,存在检测距离有差别,有误差存在;
(3)机械臂无法动作或动作不连贯;
3.2 问题分析及解决方法
(1)问题分析:对于舵机抖动情况,由于单个动作分解出来又没有抖动的情况,一开始以为是电源问题,更换多种电源后还是有抖动。经资料查阅后和测量后发现,四个舵机同时连贯动作会拉低电压,瞬间释放,导致单片机复位,一直这样,从而导致舵机抖动。
解决方法:在某一时刻,只有一个舵机动作,也就是只有一路pwm信号输出,相对来说舵机工作的稳定的多了,不会出现抖动的情况,很好的解决了舵机抖动的情况。
(2)问题分析:对于超声波检测物体有误差存在,这是硬件本身的缺陷所导致的,由于设计中采用的超声波模块价格低廉,所以性能不稳定,有误差存在。
解决方法:若出现此种情况,及时按下复位键,就能很好的避免超声波检测失误。
(3)问题分析:对于一开始机械臂无法动作或动作不连贯,是由于机械臂活动关节的螺丝上的太紧了。
解决方法:将机械臂活动关节的螺丝调松一点,就能很好的解决问题。
4 结论
本文设计了一种可实现自动行驶、自动避障、自动挖掘的玩具挖掘机,通过整车调试,发现实物能较好实现预期功能,硬件简单、成本较低,并且具有一定的智能性和趣味性。当然,设计中还存在一些不足,如还可以增加人车互动方面的功能,在控制精度方面进一步提高等。
【参考文献】
[1]谢科.基于环境识别平台的挖掘机智能作业试验系统研制[D].浙江大学,2016.
[2]刘禹廷.负载口独立挖掘机的智能控制系统研究[D].浙江大学,2016.
[3]陈乾林,陈海虹,周潜.挖掘机操作室温度智能控制系统研究设计[J].机电技术,2013,(04): 73-75.
[4]赵鑫.智能挖掘机轨迹控制研究[D].中南大学,2012.
[5]贺继林,赵鑫,张大庆,宋军. 新型智能挖掘机自动轨迹控制研究[J].广西大学学报(自然科学版),2012(02):259-265.
