无人潜航器DVL测速组合定位校正阻尼抑制方法
2018-03-15李明
李明
近些年来,无人潜航器在海洋勘探等军事任务中发挥着重要的作用。无人潜航器在执行任务时精确的导航定位精度是其完成任务的保障。目前,无人潜航器上普遍应用的导航系统为捷联式惯性导航系统(简称捷联惯导系统)与其他导航系统的组合。
捷联惯导系统在长时间工作时会因为舒勒振荡而产生随时间积累的误差,进而影响导航系统的精度。对于应用时间较短的导航系统,如导弹、飞机上的惯导系统等,其误差累积并不严重。但是对于无人潜航器尤其是有军事用途的无人潜航器而言,有着长航时和隐蔽性的工作要求。因此,由舒勒振荡引起的累积误差会对长航时工作的无人潜航器导航精度产生较大的影响。
针对以上问题,国内外学者提出,捷联惯导系统阻尼分为内阻尼和外阻尼两种方式,利用GPS、多普勒等提供的速度量测信息对系统阻尼,称为外阻尼方式。利用捷联惯导系统自身测得的速度进行航行器姿态速度的估计引入系统进行阻尼控制,称为内阻尼方式。较多文献集中在运用内阻尼方式进行系统误差抑制,杜亚玲等[1]在捷联惯导系航姿系统的模糊内阻尼算法研究中,将传统的平台内阻尼思想引入到捷联惯性航姿系统中,在数学平台上实现阻尼网络,采用模糊内阻尼系统,较为简单地保证系统运行的实时性;李魁[2]将惯导系统速度作为参数引入水平通道控制回路,利用模糊控制器估计系统的实时速度,设计了二阶阻尼网络达到了抑制误差的目的;姜璐[3]在舰船惯性导航系统自适应阻尼网络控制中,设计了一种单通道水平网络自适应控制系统,以定位误差的振荡峰值作为自适应控制的目标函数,确立了阻尼网络的阻尼系数关于加速度变化量的优化函数。
以上提到的各种内阻尼与无阻尼系统有较好的效果,但由于捷联惯导系统本身就存在一定的误差,因而未引入外速度信息补偿系统误差,不能达到较高精度系统的需求。吴晓[4]提出了采用水平阻尼、方位阻尼、外速度阻尼进行误差抑制的方法,对水平阻尼和方位阻尼分别进行了网络结构和网络参数设计,但文中主要针对的是惯性测量组件随机漂移引起的发散误差对系统的影响,起到了误差抑制的效果,但没有考虑长航时舒勒振荡对系统的影响。方国强等[5]提出将内水平阻尼与外速度阻尼结合的方法针对水面舰船的惯导系统进行改进,本文在此基础上针对水下无人航行器的特点对外速度阻尼进行改进,并引入加权融合外速度算法的概念,使得引入阻尼的外速度更加准确。
多普勒外速度阻尼网络是通过将多普勒测得的外速度信息进行加权融合求得更准确的速度信息后,引入无人潜航器导航控制中,达到既能对无人潜航器阻尼又能对速度和加速度产生的误差进行补偿的效果。因此针对具有特殊任务需要长时间航行的无人潜航器,本文将从抑制舒勒振荡的角度,抑制长时间运行于无人潜航器上的捷联惯导系统的误差累积问题。阐述了多普勒外速度阻尼系统在无人潜航器导航中的应用。
1 无人潜航器建模
无人潜航器建模是对其进行导航定位控制的基础。根据应用习惯分别用i 系、系、系、系来代表几种典型的导航坐标系,即地心惯性坐标系、地心地固坐标系、导航坐标系、载体坐标系[6],方便于下面对于无人潜航器模型的推导。根据捷联惯导原理[7]可以得到姿态、速度、位置的更新方程如下。
捷联惯导系统用于导航解算的速度方程为
捷联惯导系统用于姿态更新的微分方程为



根据捷联惯导中,导航坐标系与地球坐标系的关系可得到捷联惯导系统的位置更新方程:

式(1)~(3)分别为无人潜航器的姿态更新方程、速度更新方程以及位置更新方程。它们是研究捷联惯导系统以及多普勒外速度阻尼在无人潜航器中应用的基础。接下来将分析舒勒振荡对于无人潜航器导航的影响。
2 舒勒振荡的产生及对无人潜航器的影响
舒勒教授在研究罗经的加速度误差时发现,如果陀螺具有84.4 min的周期,它将保持在重力平衡位置,而不受运载体加速度的干扰。因而对于应用惯性导航系统的无人潜航器导航而言,若想使捷联惯导的数字平台稳定,就必须要使得系统满足舒勒调整条件。对于较短时间航行的系统而言,不需要考虑舒勒振荡对系统的影响,但对于长时间航行的无人潜航器而言,这种影响是不可忽略的。
陀螺漂移是惯性导航系统误差的主要来源。它能够激励舒勒周期振荡。从而使得速度和位置产生常值的误差分量。对于无人潜航器所应用的捷联惯导而言,陀螺仪所产生的常值误差对于经纬度误差是随时间增长的,因而惯性系统的误差是随时间累积的误差[8]。
由于误差的累积,将使得导航定位的位置越来越偏离无人潜航器实际航行的位置。这对于在较窄水域航行的无人潜航器将存在触碰损坏的很大危险。因而必须采取有效措施,抑制舒勒振荡对于长时间航行的无人潜航器所产生的影响。
通过在舒勒回路串联水平阻尼网络可以抑制部分舒勒周期振荡产生的误差。但是这种内阻尼抑制误差的方法会使得系统不在满足舒勒调整条件,也就是当无人潜航器以一定加速度运动时,由于加速度的存在,会使得系统产生误差,而且误差会随着加速度的增大而增大,而多普勒外速度阻尼网络通过外部测得的速度信息对捷联惯导系统进行辅助,可以有效解决这个问题。
3 多普勒外速度阻尼网络
在本文考虑的捷联惯导系统与其他系统组合的导航系统中,无人潜航器可以通过多普勒测速仪得到外速度信息,为了得到更加精准的外测速度信息,通过两套多普勒测速仪的加权融合运算可以得到准确的结果。在水下运动的无人潜航器由于水下环境的特殊性,并不能一直处于平稳的水平状态,也就会使得多普勒测得的速度不准确,甚至可能测不到外速度,采用这种两套多普勒测速仪加权融合的算法可以有效地避免这种问题。另外,通过压力传感器可以获得无人潜航器的深度信息,通过姿态传感器OCTANS可以得到艏向信息。
内阻尼网络是直接应用系统内部的量测信息通过网络设计达到提高系统性能的目的。不同于内阻尼的是外阻尼系统需要外部测量的信息对于捷联惯导系统进行辅助导航,从而抑制舒勒振荡引起的误差,提高捷联惯导系统的导航精度。
多普勒外速度阻尼网络是利用捷联惯导以外的多普勒传感器实时测得无人潜航器的运动速度信息。将测得的信息应用于惯性导航舒勒振荡所引发的误差的阻尼修正,从而克服舒勒振荡对于长时间航行的无人潜航器的导航误差累积影响。在引入内阻尼的情况下,会改变系统的舒勒调整条件,为了有效克服在引入内阻尼后所产生的误差,提出如下引入加权融合的多普勒外速度阻尼网络的方法。通过加权融合算法获得较为精确的外速度值,与系统内部计算得到的速度信息进行比较对系统进行阻尼,来减小无人潜航器的加速度和速度对惯性系统陀螺仪产生的误差。
由于应用多普勒外速度与无人潜航器携带的捷联惯导系统的内部推算速度的差值作为阻尼项对舒勒振荡产生的误差修正,为了研究问题的简化本文在在静止基座条件下推导外速度阻尼网络的构成,这与无人潜航器在运动时,利用外速度阻尼网络修正没有区别[7]。

图1 多普勒速度单通道水平外阻尼系统方框图Fig. 1 Block diagram of single channel horizontal external damping system with Doppler velocity
本文对传统的外速度阻尼网络进行了改进,考虑到多普勒在采集速度的过程中,会由于水下无人航行器的左右摇摆而使得测的速度不准确,因而采取信息加权融合的方式在航行器两侧装上多普勒测速声呐,根据无人潜航器的姿态实时判断,比较两个多普勒测速仪的信息和,并且确定和的值,其中和的和为1,加入到外速度阻尼网络中。如无人潜航器出现大角度翻转时,一套多普勒测速仪测得的速度信息将不再是对底部的信息,此时令此套多普勒测速仪测得的速度信息的系数为0,而有效多普勒测得的系数为1,上述提到的为特殊情况,当无人潜航器在正常航行时,认为两套多普勒系统均为有效,此时分配给它们的权值系数和均为一半。
当不加阻尼时,可以令传递函数为1,即外测速度阻尼对捷联惯导系统不起作用。而当需要引入外速度阻尼时,传递函数不为1,外测速度将对系统产生影响。不加阻尼时,系统为无阻尼网络,满足舒勒调整条件,就不会对系统产生干扰,而当加入阻尼系统之后,就会破坏原有系统的舒勒调整条件,加入外速度阻尼对合理调整就会使得系统不再产生误差,消除加速度对系统的干扰。
根据图1有:
4 仿真分析
经过和无阻尼工作方式的对比可以发现,多普勒外速度阻尼工作方式的明显优势,可以有效抑制捷联惯导系统的舒勒振荡误差,从而提高系统的精度。对于长时间在水下航行的无人潜航器而言,这种精确的导航系统可以提高其水下作业的安全性。
通过与无阻尼状态的对比,可以说明有阻尼状态的优势。从仿真曲线中个可以看出,无人潜器的姿态误差、速度误差以及位置误差均存在振荡并且发散的情况。而加入外速度阻尼后的系统,虽然在开始阶段存在振荡,但是振荡不断减小。姿态误差与速度误差稳定收敛于零值附近,而位置误差也比无阻尼状态稳定,因而本文提出的DVL测速组合定位方法可以有效抑制阻尼振荡。
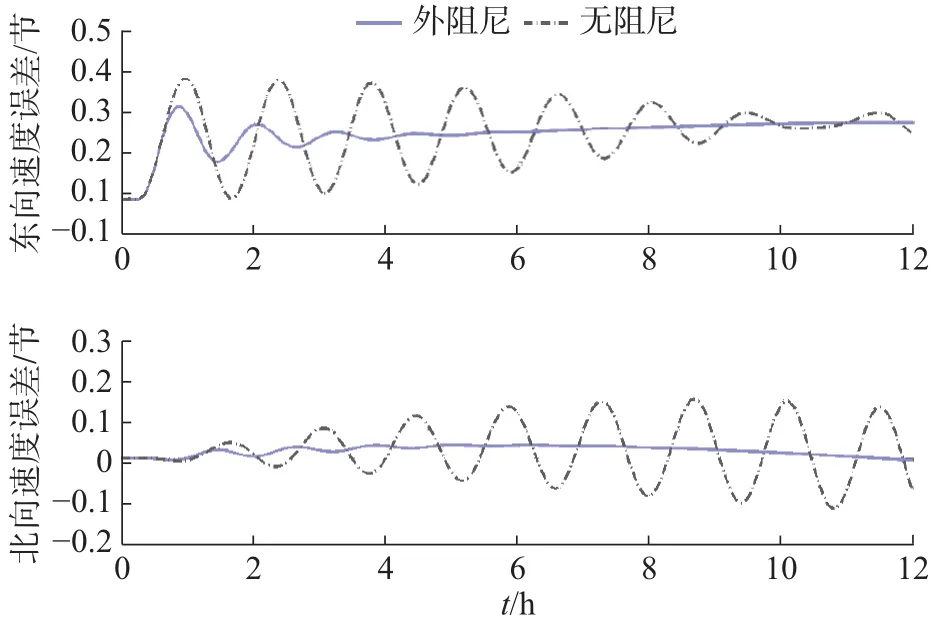
图2 速度误差曲线Fig. 2 Velocity error curve
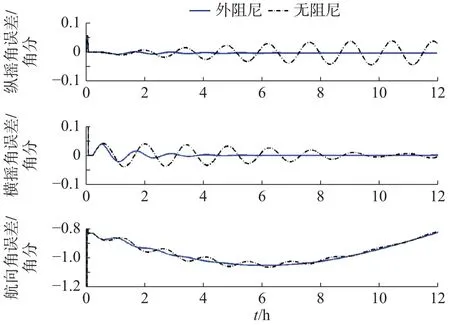
图3 姿态误差曲线Fig. 3 Attitude error curve
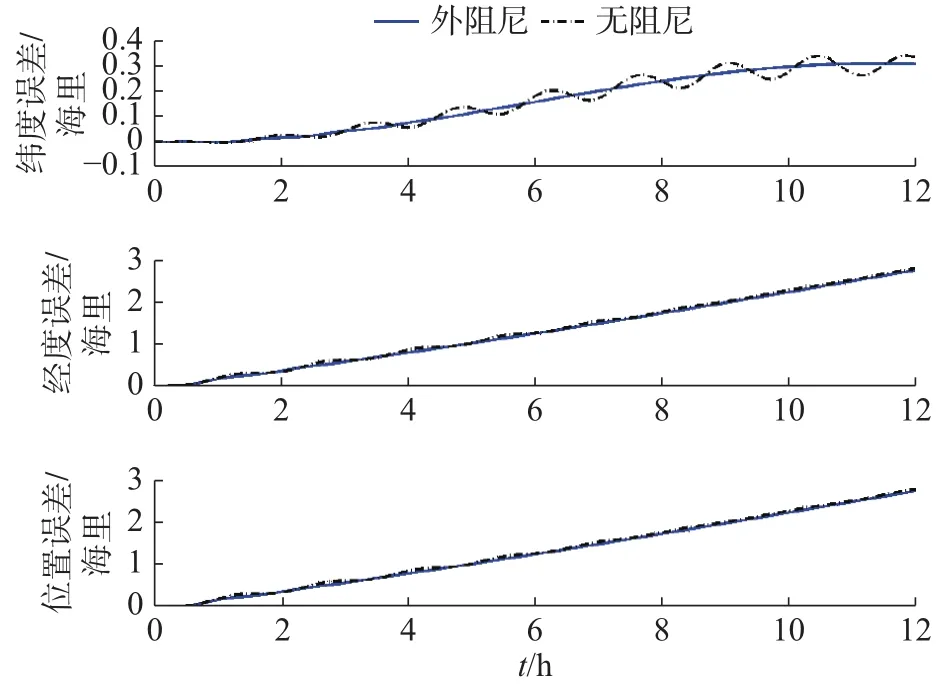
图4 位置误差曲线Fig. 4 Position error curve
5 结束语
本文提出的这种多普勒外速度阻尼系统,对于传统的应用于无人潜航器上的捷联惯导系统的改进,更加适用于长时间航行的有作战任务的无人潜航器的运行。并对于传统的外速度阻尼改进,采用输入信息加权融合的方式,使得输入信息更加准确。通过仿真试验验证了,所设计的多普勒外速度阻尼网络的有效性,可以有效抑制舒勒振荡对系统的影响。
[1]杜亚玲, 刘建业, 刘瑞华, 等. 捷联惯性航姿系统中的模糊内阻尼算法研究[J]. 南京航空航天大学学报, 2005, 37(3):274–278.DU Yaling, LIU Jianye, LIU Ruihua, et al. Fuzzy damped algorithm in strapdown attitude heading reference system[J].Journal of Nanjing university of aeronautics and astronautics, 2005, 37(3): 274–278.
[2]李魁, 张京娟, 刘芳. 长航时惯导系统的模糊控制内阻尼算法[J]. 哈尔滨工程大学学报, 2012, 33(4): 485–488.LI Kui, ZHANG Jingjuan, LIU Fang. A fuzzy control internal damping algorithm in a long-endurance inertial navigation system[J]. Journal of Harbin engineering university,2012, 33(4): 485–488.
[3]姜璐, 于运治, 陈勇. 舰船惯性导航系统自适应阻尼网络设计[J]. 电光与控制, 2014, 21(4): 52–55, 96.JIANG Lu, YU Yunzhi, CHEN Yong. An adaptive-damping network designed for inertial navigation system of ships[J]. Electronics optics and control, 2014, 21(4): 52–55,96.
[4]吴晓. 长航时高精度捷联惯导系统误差抑制技术研究[D].哈尔滨: 哈尔滨工程大学, 2012: 1–89.WU Xiao. Research on long-duration high-accuracy error inhibiting technology of strapdown inertial navigation system[D]. Harbin: Harbin Engineering University, 2012:1–89.
[5]方国强, 吴宏悦. 外速度补偿的阻尼惯导系统[J]. 舰船科学技术, 2013, 35(5): 62–64.FANG Guoqiang, WU Hongyue. The damp inertial navigation system under the outside speed compensation[J]. Ship science and technology, 2013, 35(5): 62–64.
[6]张宏德. 微小型观探测UUV水下组合导航技术的研究[D]. 哈尔滨: 哈尔滨工程大学, 2013: 24–27.ZHANG Hongde. Research of mini UUV integrated navigation technology for ocean surveying and detecting[D]. Harbin: Harbin Engineering University, 2013: 24–27.
[7]黄德鸣, 程禄. 惯性导航系统[M]. 北京: 国防工业出版社,1986: 122–125.
[8]陈哲. 捷联惯导系统原理[M]. 北京: 宇航出版社, 1986:1–247.
[9]王奎民. 主要海洋环境因素对水下航行器航行影响分析[J]. 智能系统学报, 2015, 10(2): 316–323.WANG Kuimin. Influence of main ocean environments on the navigation of underwater vehicles[J]. CAAI transactions on intelligent systems, 2015, 10(2): 316–323.
[10]于玖成, 何昆鹏, 王晓雪. SINS/DVL组合导航系统的标定[J]. 智能系统学报, 2015, 10(1): 143–148.YU Jiucheng, HE Kunpeng, WANG Xiaoxue. Calibration for strapdown inertia navigation/Doppler velocity log integrated navigation system[J]. CAAI transactions on intelligent systems, 2015, 10(1): 143–148.
