基于电磁场计算的输电线路无人机巡检安全飞行区域确定方法
2018-03-14郑天茹孙立民娄婷婷刘巧红
郑天茹 ,孙立民 ,娄婷婷 ,郭 翔 ,刘巧红
(1.国网山东省电力公司电力科学研究院,山东 济南 250003;2.国网技术学院,山东 济南 250002;3.国网山东省电力公司济南供电公司,山东 济南 250012)
0 引言
近年来,我国国民经济的持续快速发展对我国电力工业提出了越来越高的要求。现有的人工巡线作业方式劳动强度大、工作条件艰苦,劳动效率低,已经不能适应现代化电网建设与发展的需求。出于建设坚强智能电网的需要,无人机巡线作为一种比较先进、科学、高效的电力巡线方式,开始逐步实现工程化应用[1-5]。
目前,已有关于介绍实际飞行环境中复杂电磁环境对无人机的影响、无人机遥测链路系统和电气系统的电磁兼容研究、无人机主要电源电磁干扰的抑制方案、无人机避障等的相关文献[6-12],以及有关高压输电导线电磁环境对人体影响的介绍[13]。而高压输电导线电磁环境对电力巡线的无人机在进行巡线作业时的安全可靠性的影响、所搭载的电子设备的干扰及巡线作业安全距离的评测,尚未有系统的研究成果报道。
以500 kV输电线路为例建立电磁场模型,计算在距输电导线一定距离时的电磁场强度,并分析电力巡线无人机正常工作时可承受的电磁场强度范围,从而得出无人机在巡线作业时与输电导线安全距离的范围。安全距离的确定能够降低无人机电力巡线作业的危险性,对保证人身、电网和设备的安全具有重要意义。
1 输电线路电磁场计算
1.1 模型建立
以500kV交流输电线路为例,选用典型直线塔型,如图1所示。设定参数为:输电导线相间距12 400 mm;输电导线距地高度30 000 mm;地线间距20 550 mm;地线距输电导线垂直高度7 800 mm;导线采用4×LGJ-400/35型号,导线半径13.4 mm、分裂间距450 mm、电导率 3.183×107S/m;地线采用GJ-80 型号,导线半径 5.7 mm、电导率 5.075×106S/m。
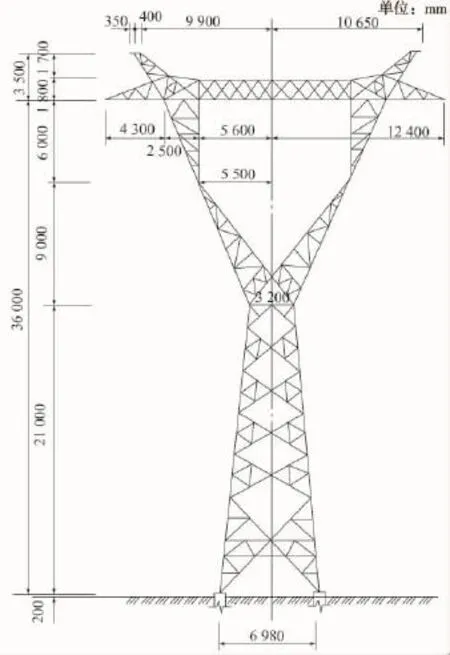
图1 500 kV交流输电线路典型直线塔
仿真计算时,为了得到此电压等级输电线路可能会产生的最大电磁场影响,设定输电导线的输电电流为该型号导线可承受最大电流值,为3 460 A。利用Ansoft Maxwell电磁场计算软件仿真计算,为便于计算,做简化处理:大地为无穷大导体面,电位为0;导线为无限长直平行地面的光滑圆柱体,导线表面为等位面;忽略杆塔等临近物体的影响,忽略导线、避雷线的端部效应和弧垂影响[14]。简化后,计算架空输电线路导线周围电场强度问题可转化为平行多导体系统的二维交变电场计算问题,即对输电导线在导线横截面方向上建立二维模型,如图2所示。为了清楚可见各项导线和简化大地模型,图中导线与计算空间尺寸参数非等比例绘制;图中各项导线中心足够长线段是为了辅助分析计算仿真结果,仅在结果分析时存在。
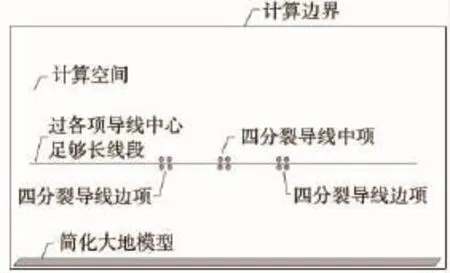
图2 500 kV交流输电线路电磁场仿真计算模型
1.2 仿真计算
选取仿真区域为240 m×100 m,即距离输电导线水平方向最大距离为107.6 m,垂直方向高于输电导线最大距离为70 m。利用Ansoft Maxwell电磁场计算软件进行仿真计算,500 kV交流输电线路某项导线单子导线周围空间磁场强度、电场强度的计算结果分别如图3、图4所示。
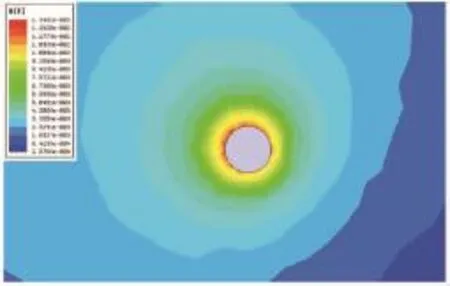
图3 磁场强度计算结果
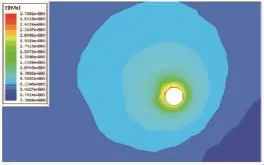
图4 电场强度计算结果
由图3、图4可知,整个计算空间内,磁场强度B的最大值为1.346 2×10-2T,电场强度E的最大值为2.786 1×106V/m,均主要出现在子导线表面处;B最小值为 2.576 6×10-8T,E 最小值为 7.706 4 V/m,均分布在离导线较远的空间。
计算水平方向与导线一定距离范围内的电磁场强度。在导线的同高度上取水平方向长度为220 m的线段 (即图2中所示过各项导线中心足够长线段),设定该线段左、右两侧端点处坐标分别为0 m、220 m,三相导线位于该线段的中间位置,计算该线段上的B、E值,如图5、图6所示。
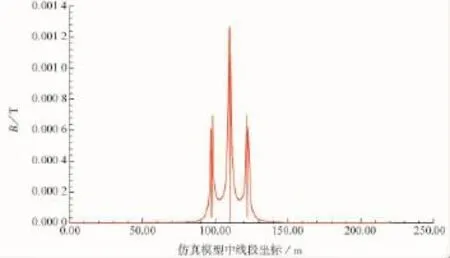
图5 水平方向上与输电导线一定距离范围内的磁场强度
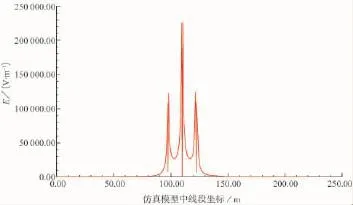
图6 水平方向上与输电导线一定距离范围内的电场强度
图5、图6中,横轴为水平方向上坐标,三相导线的位置分别处于97.6 m、110 m、122.4 m处;纵轴为电场强度值。可得与导线水平方向距离处电磁场强度的具体数值对应关系。
2 电力巡线无人机可承受电磁场强度
以某中型电力巡线无人机为例,其基本结构如图7所示。可能收到电磁场强度影响的部分主要包括三轴数字磁场计、转速计、GPS定位系统、三轴陀螺仪、伺服舵机等。

图7 某中型电力巡线无人机基本结构
1)三轴数字磁场计。三轴数字磁场计是采用磁阻传感器原理测量磁场的强度和方向,在无人机上主要用于航向测量。其使用量程要求为-2~2 Gs,即-2×10-4~2×10-4T。
2)转速计。转速计在无人机上主要用来测量旋翼的旋转速度,工作原理基本等同于霍尔传感器,即利用磁力线切割产生电流的方法测量转速。其工作点的感应强度一般为10~99 mT,选取飞机安全飞行区域内的磁场强度应小于5×10-5T。
3)GPS定位系统。GPS定位系统接收信号的频率一般大于1 000 MHz,远大于我国一般输电线路采用的50 Hz。因此输电线路正常情况下周围的电磁场辐射不会影响GPS定位系统的工作。
4)三轴陀螺仪。三轴陀螺仪是测量飞机相对惯性空间的转角或角速度的装置,主要用来展示飞机的飞行姿态和航向。陀螺仪是利用磁场的动态变化获得飞机飞行的数据,其要求的工作磁场动态范围为-1.9~1.9 Gs,即-1.9×10-4~1.9×10-4T。
5)伺服舵机。伺服舵机是飞行控制系统的重要组成部分,也是飞机的执行机构,飞机的各种运动都要靠伺服舵机带动舵面偏转来实现。伺服舵机中易受电磁场干扰的部分为无刷电机中的磁阻传感器,其工作要求的磁场范围为-6~6 Gs,即-6×10-4~6×10-4T。
6)电流变效应。电流变液在电场的作用下,其粘度会产生明显的变化,不只使流体变稠,甚至凝固而变成塑性体,并具有抗剪切能力。当电场消失时,电流变液立即变稀并迅速恢复原有的液体状态,这种变化成为电流变效应。其广泛应用于航空工业、汽车工业、控制工程、机器人及液压工程等行业,应用于避震器、减震阻尼器、制动器、离合器、机械臂、液压控制阀等元件。使用电流变的装置系统重量轻、反应快、噪音小、耗能低,且容易控制,电流变液在工程应用上是极具价值的新材料。无人机的元器件目前尚未引进此种材料,但电流变效应说明,电场强度达到一定数值,会影响材料的特性,引起一定性能变化,无人机飞行的首要条件为稳定,不希望出现性能波动。为保证其安全飞行,需选择电场强度小于1 kV/mm(即 1×106V/m)的区域,不会发生电流变效应。
综上所述,电子设备正常工作时要求磁场强度小于 5×10-5T,电场强度小于 1×106V/m(不包括搭载其他设备或另作他用的无人机飞行平台)。
3 无人机巡检安全飞行距离预测方法
3.1 误差分析
为尽可能保证飞行区域的安全性,分析无人机本身、巡线准备各个步骤及外界环境影响造成的各项误差,将各部分误差均取最大值,主要包括:无人机飞行平台飞控GPS误差造成与规划线路偏差距离,记为x1;最大允许飞行风力造成偏离航线偏差距离,记为x2;线路打点望远镜式测距仪的测距误差,记为x3;线路打点GPS定位仪数据误差造成规划线路与实际预设位置距离偏差,记为x4;无线通信系统最长延时,记为t。
3.2 仿真结果分析
根据无人机搭载电子设备正常工作时要求的磁场强度,假定仿真计算结果有100%的偏差(考虑仿真线路与实际线路可能在线路高度、相间距、排列方式、相序等方面有差别,尽可能叠加其参数偏差,理论上不超过100%),查找两边相导线外侧达到此磁场强度处,距离对应边相导线的水平距离,分别记为l1、l2。
根据无人机搭载电子设备正常工作时要求的电场强度,假定仿真计算结果有100%的偏差,查找两边相导线外侧达到此电场强度处,距离对应边相导线的水平距离,分别记为 l3、l4。其中,l1、l2、l3、l4均采用进一取整法计数。
3.3 其他数据
测量飞行平台的某些尺寸:单片机翼长度,记为a1;机头与主轴间距离,记为a2;机尾与主轴间距离,记为a3。此类数据主要为保证体积较大的无人机系统整体处于安全飞行区域内。
3.4 安全距离预测公式
设无人机巡检的飞行速度为v。所得数据均采用进一取整法计数,推断电力巡线无人机巡检时的基本安全距离为

4 实例分析
以所述某中型电力巡线无人机巡检500 kV交流输电线路为例,经大量巡检试验数据总结得到x1+x2=7 m,x3=1 m,x4=3 m,v=10 m/s,t=300 ms。对该型号无人机进行测量,可知a1=106 cm,a2=68 cm,a3=144 cm。
对仿真数据结果进行分析,可知对500 kV输电线路,l1=l2=8 m,l3=l4=1 m。
因此,根据安全距离预测公式,可推断该中型电力巡线无人机对500 kV交流输电线路巡检的基本安全距离为24 m。
此距离仅适用于该中型电力巡线无人机巡检500 kV无严重放电现象的输电导线时,在严格按照操作流程使用精密仪器对实地线路考察后,且无人直升机各分系统正常工作时,规划线路与导线间的最小安全距离。
5 结语
以某中型电力巡线无人机巡检500 kV输电线路为例,计算分析得出无人机在巡线作业时与输电导线安全距离的范围。该安全距离的确定能够提高无人机电力巡线作业的可靠性和安全性,对保证人身、电网和设备的安全具有重要意义。
同样,使用该方法可推断无人机巡检其他电压等级交直流输电线路的基本安全距离。实际应用中,如果需要分析特殊塔型,需要重新建立电磁场分析模型;如果所用无人机搭载其他机型或电子器件时,需要重新确定无人机可承受的电磁场强度范围。
[1]彭向阳,陈驰,饶章权,等.基于无人机多传感器数据采集的电力线路安全巡检及智能诊断[J].高电压技术,2015,41(1):159-166.
[2]厉秉强,王骞,王滨海,等.利用无人直升机巡检输电线路[J].山东电力技术,2010,37(1):1-4.
[3]李力.无人机输电线路巡线技术及其应用研究[D].长沙:长沙理工大学,2012.
[4]彭向阳,刘正军,麦晓明,等.无人机电力线路安全巡检系统及关键技术[J].遥感信息,2015,30(1):51-57.
[5]张捷,严维欣.配电线路采用无人机巡线的应用分析[J].电力与能源,2013,34(4):365-368.
[6]焦彦维,侯德亭,周东方,等.无人机在复杂电磁环境下的效能评估[J].强激光与粒子束,2014,26(7):136-141.
[7]李勃,黄大庆.基于电磁环境效应的无人机系统级电磁辐射指标制定[J].武汉大学学报(理学版),2007,53(3):347-350.
[8]谢瑞云,毛得明,向敏.无人机电气系统与机载通信设备电磁兼容问题研究[J].通信技术,2014,47(10):1 211-1 215.
[9]陈喆.无人机的主要电磁干扰源及抑制方案[J].电子质量,2004(9):24-26,30.
[10]王一凡,谌德荣,张立燕,等.一种用于小型无人机避障的快速视差测距方法[J].中国测试技术,2008,34(3):114-116,134.
[11]张剑,王世勇,陈玺,等.基于柱状空间和支持向量机的无人机巡线避障方法[J].中国电力,2015,48(3):56-60,66.
[12]王振华,章卫国.基于改进概率地图的无人机实时避障研究[J].计算机工程与应用,2010,46(25):220-222.
[13]蒋伟,吴广宁,黄震,等.有限元法分析特高压直流线路对人体的影响[J].高电压技术,2008,34(9):1 826-1 830.
[14]郑天茹.特高压输电线路上尖端电晕放电的研究[D].济南:山东大学,2010.
