基于融合算法的GPS/UWB/MARG协同定位系统研究
2018-03-13周群沈重张鲲陈小斯郑理强
周群+沈重+张鲲+陈小斯+郑理强
摘 要: 为了弥补在不同场景下切换时目标丢失的盲区,提出GPS/UWB/MARG的协同定位系统,实现城区建筑间混合场景下的无缝定位。在混合场景下采用一种加权融合算法实现GPS和UWB协同定位,MARG用以辅助提高GPS定位精度,先对单一子系统进行数据优化和性能分析后,以加权融合的方式处理GPS/MARG数据和UWB数据,自主判断在不同定位环境下的数据输出的最优定位信息。结果表明,协同定位系统在混合场景下平均定位精度相比于GPS/MARG系统提高了64%,定位精度更高同时拓展了单一定位系统的应用场景。
关键词: 全球定位系统; 超宽带; 组合定位; 加权融合; 圆概率误差; Kalman滤波
中图分类号: TN967.1?34 文献标识码: A 文章编号: 1004?373X(2018)06?0082?05
Abstract: To make up the blind zone in which target loses while switching between different scenarios, a cooperative positioning system based on GPS/UWB/MARG is proposed to realize seamless positioning between urban buildings in hybrid scene. A weighted fusion algorithm is adopted in hybrid scene to achieve cooperative positioning of GPS and UWB. MARG is used to auxiliarily improve GPS positioning accuracy. After data optimization and performance analysis for the single subsystem, GPS/MARG data and UWB data are processed in the mode of weighted fusion. The optimal positioning information of output data in different positioning environments is autonomously determined. The results show that the average positioning accuracy of cooperative positioning system in hybrid scene is increased by 64% in comparison with that of GPS/MARG system, and meanwhile the application scenarios of single positioning system are expanded.
Keywords: GPS; ultra?wideband; combination positioning; weighted fusion; circular probability error; Kalman filtering
室外环境的定位技术主要以全球导航卫星系统(Global Navigation Satellite System,GNSS)为主,由于其易用性和广泛覆盖性被广泛应用在户外[1],但精准度却容易受到环境的影响。室内定位技术中,UWB(Ultra?Wideband)能在宽频上发送一组极窄的低功率脉冲,使得UWB的抗干扰性优于传统窄带宽的无线解决方案[2]。UWB定位精度可达到厘米级,远远高于其他室内定位技术,却受限于应用范围小。
基于微电子机械系统MEMS(Micro?Electro?Mechanical System)技术的传感器MARG(Magnetic, Angular, Rate and Gravity)傳感器在智能终端上得到了普遍的运用。其优点是成本低、自主式定位和短时间内定位精度高;但存在传感器噪声和累积误差,无法长期获得稳定可靠的定位信息[3]。GPS/MARG组合定位弥补了GNSS的不足,提高了GPS的定位精度。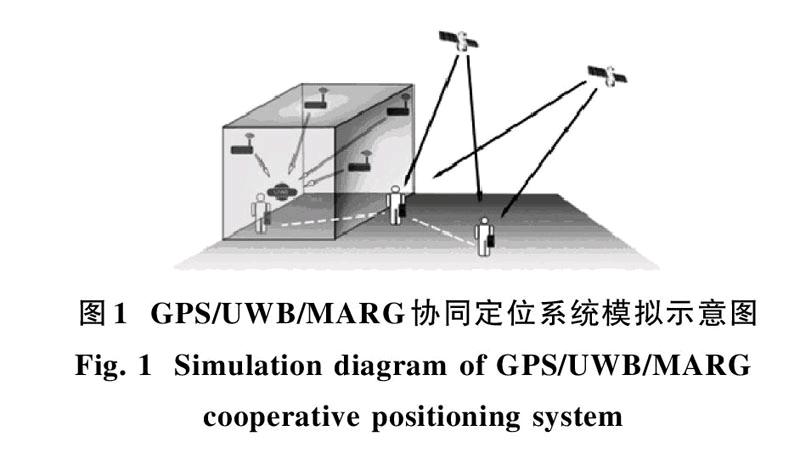
1 协同定位系统的设计
本文提出一种GPS/UWB/MARG协同定位系统,在室外场景下,GPS/MARG组合定位相互弥补和校正了系统误差。利用MARG传感器输出的速度、姿态和相对位置等信息,弥补GPS阻塞时的误差,提高了系统的鲁棒性、定位精度和使用范围。在室内场景下,由UWB定位系统提供定位数据。室内外混合场景下,采用GPS/UWB/MARG的协同定位。系统可以根据不同场景,融合不同系统的定位数据,从而实现不同场景下室内外无缝定位。GPS/UWB/MARG协同定位系统模拟示意图如图1所示。
2 GPS/MARG组合定位系统研究
GPS和MARG传感器的组合定位系统能相互弥补单一系统的缺陷[4],MARG传感器作为一种低成本自主式定位系统,在短时间定位精度高,高的频率更新能很好弥补GPS被阻塞间隙的定位,辅助提高GPS定位系统的精度。GPS定位模型通常使用Kalman滤波解决线性和高斯误差的问题,其中包括两步:预测和更新。在预测步骤中,Kalman滤波器根据动态方程将估计值从前一时间传递到当前时间,然后基于测量方程导出更新值[5]。状态空间由MARG定位系统输出的加速度、速度和噪声偏差组成,状态矢量和离散方程Xk可表示为:
[Xk=ax,ex,v,s,ay,ey] (1)endprint
[Xk=Φk,k-1Xk-1+Nk-1] (2)
式中:ax和ay分别为沿x和y轴的加速度;ex和ey分别为在x和y轴上的噪声估计误差;v表示速度的估计值;s表示在一段时间内无线终端移动的距离;Xk表示在k时刻状态方程的状态矢量;Nk-1表示状态处理噪声矢量。T表示传感器测量的时间间隔,Kalman滤波测量方程为:
[Tk=HkXk+Vk] (3)
[Tk=gx,sGPS,gyT] (4)
式中:Tk为测试矢量;gx和gy分别表示重力传感器沿x和y轴的测量值;sGPS是智能终端在时间间隔内通过的距离,通过GPS测量获得;Hk是测量转换矩阵,表示为:
[Hk=110000000000100011] (5)
3 UWB室内定位系统
3.1 坐标转换
为了实现室内室外的无缝定位对接,需先选定室外两点,精确测试室外两点的GPS位置信息,对应计算出室内UWB基站点的位置坐标。
此处室外参考点数据测量的位置信息是大地坐标(BLH),地面参考点P的位置用大地经度L、大地纬度B和大地高H表示。采用高斯投影法[6],实现大地坐标转换为平面坐标(x,y,H),变换过程如下:
[ΔL=L-L0, η=e′?cosB, t=tanB] (6)
式中:[ΔL]为经度差;L为所求点的经度;[L0]为3度带(中央子午线根据所在地的经度确定)中央子午线的经度;[e′]为椭圆第二偏心率;B为所求点的纬度。
[x=X+N2sinBcosB?l2+N24sinBcos3B? 5-t2+9η2+4η4l4+N720sinBcos5B(61-58t2+t4)l6y=NcosB?l+N6cos3B1-t2+η2l3+ N1205cos5B(5-18t2+t4+14η2-58η2t2)l5] (7)
式中:X为纬度B对应的子午线弧长;N为所求点对应的卯酉圈子午线半径。从而计算出参考点的平面坐标(x,y)信息[7]。
3.2 基于圆概率误差的定位分析
圆概率误差(Circular Error Probable,CEP),常作为评定精度的方法,表示落点的密集度的性能指标。此时CEP定义包含了精度试验时的系统误差,能更具体地体现精度的优劣。以定位点为原点,建立直角坐标系XOY,设纵向定位偏差y和横向定位偏差x,均服从正态分布,圆周率误差的一般形式如下:
式中:σx,σy为纵向和横向落点偏差的标准差;μx,μy为纵向和横向落点偏差的均值;ρ为纵向和横向落点偏差的相关系数[8],0≤[ρ]< 1。为了进一步优化UWB系统的精度范围,将概率值P提高到0.95,定义rUWB,k为95%的定位落点散布范围的误差半径。然后设定相应的门限值半径RUWB。同上,此处提出参数:误差率eUWB,k,定义如下:
[eUWB,k=RUWB,k-rUWB] (9)
根据误差半径rUWB,k的大小判定UWB定位精确度,rUWB,k越小精度越高,rUWB,k越大误差越大。95%落点产生巨大偏移时,半径rUWB,k将超过门限值RUWB,根据rUWB,k的范围对环境进行判断,并确定最优的系统定位方式。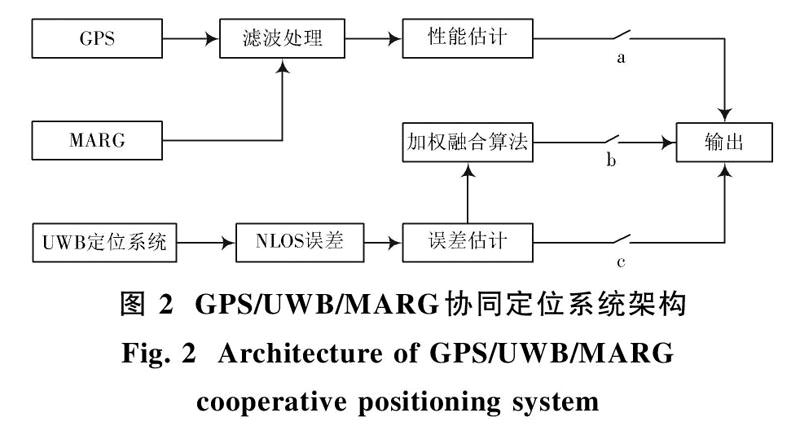
4 GPS/UWB/MARG的协同定位系统
本文先对GPS/MARG位置数据做性能检测,以此来判断场景和定位方式。当组合子系统性能在可行范围内,将由组合子系统数据直接输出,当GPS/MARG子系统失锁、信号弱或精度差的状态时,将调用UWB室内定位数据。本文将采用一种加权融合算法,实现在不同状态下处理GPS/MARG组合数据和UWB数据的融合和切换。图2是GPS/UWB/MARG协同定位系统構架图。
基于自适应融合算法的GPS/UWB/MARG协同定位系统具体实现如下:
首先,由GPS/MARG组合系统给出相应位置数据,并对数据进行性能检测,性能检测主要由GPS系统的水平精度因子HDOP决定[5]:
[HDOP=(g11+g22)12] (10)
式中,[giii=1,2,…,4]是[G=(HT?H)-1]的对角元素,[H]是位置信息矩阵。此处提出另一个参数:误差率 eGPS,k,定义如下:
[eGPS,k=lGPS,k-lGPS,k] (11)
式中:[lGPS,k]表示k时刻获取的GPS的位置信息;[lGPS,k]表示k时刻经过Kalman滤波后的估计信息。从而估算出组合定位子系统性能参数rGPS,k,定义如下:
[rGPS,k=αeGPS,k+(1-α)HDOP] (12)
式中,加权因子α可根据实际数据估算取值。
根据实验环境选取组合子系统性能阈值rGPS,k,从而判断组合子系统定位数据是否满足场景需求。
1) 当rGPS,k小于性能阈值时,系统将判定组合定位子系统能满足此时场景的定位需求,并将数据直接作为整个系统的输出。
2) 当rGPS,k大于性能阈值时,系统将判断组合定位子系统数据不可靠,无法满足当前场景定位需求,将启用UWB定位子系统。通过对UWB定位系统采用基于圆概率误差算法分析,得到UWB系统定位误差半径rUWB,k,作为误差半径阈值。
3) 当rUWB,k大于误差半径的阈值时,系统将判断此处为混合场景,属于户外场景与室内环境的交错区域,将协同GPS/MARG组合定位子系统,通过加权融合算法,输出GPS/UWB/MARG协同系统的加权和,如下:endprint
[lk=(eGPS,k)-1lGPS,k+(eUWB,k)-1lUWB,k(eGPS,k)-1+(eUWB,k)-1] (13)
4) 当rUWB,k小于误差半径的阈值时,系统将判斷为室内场景,满足定位需求,并将采用UWB定位子系统数据直接作为整个系统的输出。
5 实验分析
本次试验选取地点在某创新创业中心。路径规划如图3所示。
实验步骤分为两部分:第一部分,布置室内UWB定位基站,取室外坐标点位置坐标推算室内基站点的位置坐标,规划室内室外混合场景移动路线;第二部分,本文中UWB室内定位技术采用自主研发的室内定位系统Hainan EVK2.0系统,将GPS接收机、磁/惯性传感器和UWB移动标签固定在移动物体上,按照规划路径移动。
试验场景包括室内室外混合场景,在室内场景定点安放8个基站,选取室外参考点1,2,对参考点1,2进行多次长时间GPS数据采集,得出参考点平均值,如下:
参考点1平均值:(19.951 651,110.558 255)
参考点2平均值:(19.951 668,110.558 332)
通过与坐标转换得出室内基站平面坐标。
实验选取三种情况进行观测比较:
1) 使用GPS/MARG组合定位系统监控移动目标,移动目标按照图3的路径移动,测试轨迹如图4所示。
2) 仅使用UWB室内定位系统,检测范围仅包括室内场景和室内外重叠区域。测试轨迹如图5所示。
根据情况1)GPS/MARG的测试结果,在室外场景下GPS/MARG定位子系统的性能指标rGPS,k,基本满足定位需求,在室内场景下,从图4可以看出,GPS基本处于失锁状态,无法提供数据。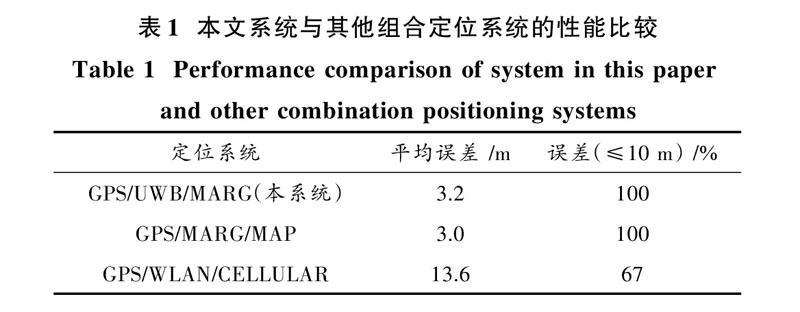
根据情况2)UWB室内定位系统,只用于室内场景和室内外交汇范围的定位监控,得出室内场景定位可达到厘米级精度,满足系统定位需求。在室内外交汇范围下,精度有所欠缺,有间歇性跳变的情况。
根据情况3)GPS/UWB/MARG协同定位系统,得出较好的定位路径结果。室内和室外场景仅调用单个子系统提供数据输出即可。在室内外交汇范围下,由于部分墙体的遮挡,导致GPS性能下降,需要加入UWB室内定位数据,使用加权融合算法,融合数据输出。
从实验结果情况分析,本文提出的定位系统集成三种互补的定位技术提高定位性能。GPS定位系统与UWB室内定位系统都存在一定的局限性。在MARG传感器定位的辅助下,GPS/UWB/MARG协同定位系统应用场景更广泛,定位精度更稳定。本系统的平均定位精度提高了64%(8.9~3.2 m)。 系统的应用场景更加多样化,可以在更复杂的环境中精准定位。对比不同组合定位系统的误差概率分布如图7所示。
系统与其他最新定位系统的比较如表1所示。
GPS/MARG/MAP组合定位系统[9]使用建筑图信息提高定位性能,但是由于MARG传感器必须固定在人体脚部,限制了在实际环境中的应用。 GPS/WLAN/CELLULAR系统[10]可以在城市地区和室内提供连续准确的位置信息,但需要依靠智能设备的支持。该系统与之相比可以实现更好的定位性能。
6 结 论
本文提出的GPS/UWB/MARG协同系统与单一的GPS 定位子系统和UWB室内定位子系统相比,子系统不可测区域得以补充,解决了移动目标在不同环境下切换时定位目标丢失的问题, 不但有效提高了定位精度,还完成了室内外的无缝定位, 进一步提高了定位系统的使用范围。同时将本系统与其他的组合定位系统进行了比较,验证了GPS/UWB/MARG系统的精确性和实用性。
注:本文通讯作者为沈重。
参考文献
[1] 李校雯,付宇彤,丁家圣.浅谈全球卫星定位系统GPS发展[J].通讯世界,2016(13):69.
LI Jiaowen, FU Yutong, DING Jiasheng. GPS development of global positioning system [J]. Telecom world, 2016(13): 69.
[2] 张鲁川,董磊.浅析UWB定位技术的应用[J].科技创新与应用,2015(19):285.
ZHANG Luchuan, DONG Lei. Application analysis of UWB positioning technology [J]. Technology innovation and application, 2015(19): 285.
[3] 田增山,张媛.基于智能手机MARG传感器的行人导航算法[J].重庆邮电大学学报(自然科学版),2014,26(2):223?227.
TIAN Zengshan, ZHANG Yuan. Pedestrian navigation algorithm based on the smart phone of MARG sensors [J]. Journal of Chongqing University of Posts and Telecommunications (Natural science edition), 2014, 26(2): 223?227.
[4] 陈伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].合肥:中国科学技术大学,2010.
CHEN Wei. Research on GPS/self?contained sensors based seamless outdoor/indoor pedestrians pedestrian positioning algorithm [D]. Hefei: University of Science and Technology of China, 2010.
[5] 劉兴川,吴振锋,林孝康.基于自适应加权算法的WLAN/MARG/GPS组合定位系统[J].清华大学学报(自然科学版),2013,53(7):955?960.
LIU Xingchuan, WU Zhenfeng, LIN Xiaokang. WLAN/MARG/GPS combined positioning system based on adaptive weighting algorithm [J]. Journal of Tsinghua University (Science & technology), 2013, 53(7): 955?960.
[6] 王锐,徐祎,王晓翔,等.高斯?克吕格投影的远程测向方位角计算方法[J].火力与指挥控制,2013(5):90?93.
WANG Rui, XU Yi, WANG Xiaoxiang, et al. Azimuth calculation method study on remote direction finding based on Gauss?Kruger projection [J]. Fire control & command control, 2013(5): 90?93.
[7] 洪海斌.基于IMU/GPS/ZigBee的室内外无缝导航定位系统的方法研究[D].南昌:南昌大学,2014.
HONG Haibin. Research on indoor and outdoor seamless navigation and positioning system based on IMU/GPS/ZigBee [D]. Nanchang: Nanchang University, 2014.
[8] 张乐,李武周,巨养锋,等.基于圆概率误差的定位精度评定办法[J].指挥控制与仿真,2013,35(1):111?114.
ZHANG Le, LI Wuzhou, JU Yangfeng, et al. A positioning accuracy assessment method based on circular probability error [J]. Command control and simulation, 2013, 35(1): 111?114.
[9] BIRD J, ARDEN D. Indoor navigation with foot?mounted strapdown inertial navigation and magnetic sensors [emerging opportunities for localization and tracking] [J]. IEEE wireless communications, 2011, 18(2): 28?35.
[10] TSUI A W T, LIN W C, CHEN W J, et al. Accuracy performance analysis between war driving and war walking in metropolitan Wi?Fi localization [J]. IEEE transactions on mobile computing, 2010, 9(11): 1551?1562.
[11] 张丽.超宽带室内精确定位技术研究[D].青岛:中国海洋大学,2012.
ZHANG Li. Research on ultra?wideband precise positioning technology [D]. Qingdao: Ocean University of China, 2012.
[12] 唐铭,张志颖.基于TDOA室内定位算法的研究[J].科技与企业,2016(2):225.
TANG Ming, ZHANG Zhiying. Research on TDOA indoor location algorithm [J]. Science?technology enterprise, 2016(2): 225.endprint
