基于TDOA算法的差分UWB室内定位系统研究
2018-03-13陈小斯沈重周群张鲲郑理强
陈小斯+沈重+周群+张鲲+郑理强

摘 要: 超宽带UWB定位技术在受到电磁干扰、NLOS 等情况影响时,实际定位环境变得复杂,造成实际定位精度不高、定位稳定性差。通过借鉴差分GPS技术,以TDOA?UWB室内定位技术为基础,提出差分UWB定位算法。同时结合权重滑动平均法,研究并提出基于TDOA算法的差分UWB室内定位系统,以Hainan EVK 2.0系统作为实验平台进行相关的测试实验。实验结果表明,基于TDOA算法的差分UWB室内定位系统能有效提高定位精度和定位稳定性,在受到外界干扰的情况下,定位误差整体降低23%。
关键词: 超宽带定位; TDOA算法; 差分GPS; 差分UWB定位; 权重滑动平均; 室内定位系统
中图分类号: TN953+.7?34 文献标识码: A 文章编号: 1004?373X(2018)06?0045?05
Abstract: When ultra?wideband (UWB) positioning technology is affected by electromagnetic interference, NLOS and other conditions, the positioning environment becomes complicated, which results in low actual positioning accuracy and poor positioning stability. On the basis of the TDOA?UWB indoor positioning technology, a differential UWB positioning algorithm is proposed by drawing on the experience of differential GPS (DGPS) technology. Combined with the weight moving average method, a differential UWB indoor positioning system based on TDOA algorithm is studied and proposed. With the Hainan EVK 2.0 system as the experimental platform, relational testing experiments were carried out. The experimental results show that the differential UWB indoor positioning system based on TDOA algorithm can effectively improve the positioning accuracy and positioning stability, and the positioning errors are wholly reduced by 23% in the case of external interference.
Keywords: UWB positioning; TDOA algorithm; differential GPS; differential UWB positioning; weighted moving average; indoor positioning system
0 引 言
目前,室内定位技术已成为一个热点研究领域,出现了如蓝牙技术、WiFi技术、RFID(Radio Frequency Identification)技术等的室内定位技术。与这些室内定位技术相比,兼容IEEE 802.15.4—2011标准的超宽带(Ultra Wideband,UWB)定位技术在定位精度、实时性能、带宽等方面具有很大的优势[1?2],超宽带定位技术理论上可以实现厘米级的定位精度。
基于TDOA(Time Difference of Arrival)的UWB定位技术目前已经能实现厘米级的定位精度[3],但是目前在实际应用中仍存在不少问题,例如基站之间的时钟同步问题[4]以及UWB的信号传输受电磁干扰、非视距(Non?line?of?sight,NLOS)[5]等影响,使得实际定位精度不高、定位稳定性差。这些情况对定位精度造成的影响是不一样的[6]。因此,对导致定位误差的成因进行分析是十分必要的,为寻找提高定位精度提供必要的依据。
基于TDOA的UWB定位技术与GPS(Global Positioning System)定位技术在原理上有很多相似之处,均要求基站(卫星)之间进行严格的时间同步并使用信号的传输时间来进行测距,从而形成定位坐标[7]。作为增强型的GPS技术,差分GPS(Differential GPS,DGPS)技术通过引入基准站,基准站将伪距离修正值传送给GPS接收机作误差修正,从而能在很大程度上减小GPS接收机的定位误差,提高GPS定位精度和定位稳定性[8?9]。目前已经有很多关于差分GPS的研究,但是关于差分UWB室内定位系统的研究却几乎没有。权重滑动平均[10]是一个算法简单、计算量小的算法,它能快速实时处理动态数据,能有效地抑制小幅高频噪声,例如热噪声。
本文在借鉴差分GPS技术的基础上,以TDOA?UWB室内定位技术为核心,提出了差分UWB定位算法,并结合权重滑动平均法,研究并提出了差分UWB室内定位系统。最后以Hainan EVK 2.0系统作为实验平台,验证了差分UWB室内定位系统的可行性。
1 基于TDOA算法的UWB室内定位系统
1.1 TDOA算法
TDOA算法与到达时间(Time of Arrival,TOA)算法非常相似,它们都利用信号在标签与基站之间的传输时间来实现定位。TOA算法要求基站与标签之间保持时钟同步,而TDOA算法只需要基站之间保持时钟同步。因此,TDOA算法比TOA算法更容易实现。endprint
假设ti (i=1,2,3)是基站i与标签之间的到达时间,Δti是基站i与标签之间的等效时钟误差,由此可以计算出基站i与标签之间的伪距di。若(Xi,Yi)是基站i的实际位置坐标,(x,y)是标签的定位坐标,则TOA方程为:
[x-Xi2+y-Yi2=c(ti-Δti)=di] (1)
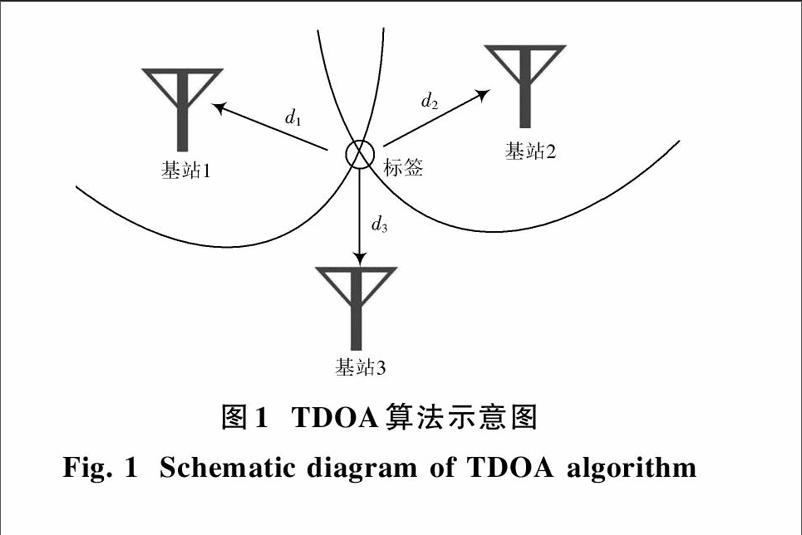
每一个TDOA决定了一个双曲线,因此当所有基站的时钟保持同步时,即Δti -Δtj≠0(i≠j&i,j=1,2,3),由式(1)可以得出一组双曲线式(2)。如图1所示,双曲线的交点就是标签的位置,因此通过求解式(2)便可以得到标签的定位坐标。
[x-X22+y-Y22-x-X12+y-Y12=c(t2-t1)= d2-d1x-X32+y-Y32-x-X12+y-Y12=c(t3-t1)= d3-d1x-X32+y-Y32-x-X22+y-Y22=c(t3-t2)= d3-d2] (2)
1.2 在实际应用中的不足
在实际应用中,基于TDOA的UWB室内定位系統仍然存在许多不足。这些不足会严重影响UWB室内定位系统的定位精度和定位稳定性。第一,很难实现所有基站之间的时钟同步。由于基站自身硬件的原因,基站在时钟同步过程中存在时钟误差的可能,这使得基站间的实际时钟无法保持严格的同步。第二,UWB定位系统内部总会存在着一些噪声,这些噪声会在测量过程中影响到定位结果,从而影响到定位精度。第三,室内的一些常见干扰也可能会影响到UWB的信号传输,如电器的电磁干扰,障碍物造成的非视距(Non?line?of?sight,NLOS)等,此类干扰往往是不可预测的,而且对定位精度的影响特别大。
2 差分UWB室内定位系统
根据第1节的分析,在实际应用中,各基站的等效时钟偏移Δti不可能是相等的,它意味着Δti -Δtj≠0。所以,如何有效地消除各基站的等效时钟误差将成为解决上述问题的关键。
本节中,在借鉴差分GPS技术的基础上,提出差分UWB定位算法并结合加权移动平均,研究并设计差分UWB室内定位系统(Differential UWB Indoor Positioning System, DUIPS)。
2.1 差分UWB定位算法
与TDOA定位算法相比,差分UWB定位算法在包含原来基站的同时,还增加了一个已知自身实际位置坐标的参考基站。参考基站不仅具有与标签相同的信号传输能力,还具有精度高、稳定性强的特点。如图2所示,参考基站向基站传送带有其实际位置坐标的数据包,基站在接收到数据包之后通过TDOA算法求解出其定位坐标,然后与其准确位置坐标进行差分,形成差分校正信息。差分校正信息将会回传到后台服务器中用以校正标签的伪定位坐标,最终形成更精确的标签定位坐标。如果参考基站的实际位置坐标是(X0,Y0),通过公式(3)可以计算出参考基站到每个基站的距离Ri:
[Ri=X0-Xi2+Y0-Yi2] (3)
假设通过TDOA算法得到了参考基站的定位坐标是(x0,y0),可以通过式(1)求得参考基站与基站i之间的伪距Di,由前面的分析可知Ri≠Di。假设ΔTi是每个基站在UWB定位过程中的等效时间误差,则每个基站的等效测距误差Δdi为:
[Δdi=Di-Ri=c?ΔTi] (4)
通常情况下,由系统内部噪声引起的测距误差不算很大,而由基站间时钟同步过程中以及基站受外部干扰时引起的测距误差却远大于系统内部噪声引起的测距误差,它们会严重影响定位精度。
在这种情况下,每个基站的ΔTi或Δdi对标签和参考基站来说是相同的,等同于它们的公共误差。联合式(2)与式(4),得到了带有差分校正的差分UWB定位方程组,如下:
[x-X22+y-Y22-x-X12+y-Y12= c(t2-t1)-ΔT2-ΔT1=d2-d1-Δd2-Δd1x-X32+y-Y32-x-X12+y-Y12= c(t3-t1)-ΔT3-ΔT1=d3-d1-Δd3-Δd1x-X32+y-Y32-x-X22+y-Y22= c(t3-t2)-ΔT3-ΔT2=d3-d2-Δd3-Δd2]
2.2 加权滑动平均法
尽管差分校正的引入可以在很大程度上减小由时钟同步、外部干扰引起的误差,但是由于基站自身内部会产生一定随机噪声,这些噪声也会对定位精度以及定位稳定性造成一定的影响。在本系统中,使用加权滑动平均法来处理经过差分校正后的定位数据,抑制随机误差。相比于其他动态数据滤波方法,加权滑动平均法具有算法简单、计算量较小的特点,它能实时、快速地处理非平稳数据,能有效抑制小幅高频噪声,如热噪声。
加权滑动平均法具有一个固定长度为N的滑动窗口,并沿数据序列滑动。每滑动一个单元长度,窗口前面将进入一个新的数据,而窗口后面最旧的数据将会被丢弃,这使得窗口总是有N个“最新”的数据。滑动窗口内的各单元对应着一个加权系数,数据越“新”,加权系数越大,反之越小。加权滑动平均法的滤波效果取决于窗口的大小与加权系数的配置,一般来说需要根据实际滤波要求来合理地选择。其数学表达式为:
[yk=i=0N-1wixk-i, kN-1] (6)
式中:N是滑动窗口的长度;i是滑动窗口内的单元号;w[i]是滑动窗口内各单元对应的加权系数;k是数据的序列号;x[k]是原始数据序列;y[k]是滤波后的数据数列。endprint
3 实验与分析
为了验证差分UWB室内定位系统的实际应用效果,借助Hainan EVK 2.0系统进行了两组实验,实验地点为海南大学南海海洋资源利用国家重点实验室。在实验结束后,对实验数据进行相关分析。
3.1 Hainan EVK 2.0系统
Hainan EVK 2.0系统(EVK系统)是由笔者团队开发的一套基于TDOA算法的UWB定位系统,包括硬件部分和定位引擎。EVK系统支持无线时钟同步以及多标签接入,目前的定位精度在30 cm以内。EVK系统的硬件主要是基站(包括一个主基站和多个从基站)和标签,如图3、图4所示。主基站定期将时钟校验包发送至所有从基站,从基站在接收到时钟校验包之后与主基站保持时钟同步。标签向已知自身实际位置坐标的所有基站发送定位数据包,然后各基站将接收到数据包的到达时间回传至后台服务器上的定位引擎,最后定位引擎根据这些数据求解出标签的定位坐标。
3.2 无外界干扰下的实验
如图5所示,使用4个基站组成了1个9.95 m×7.16 m的定位区域,其中的2個基站被安置在空调的附近。选择一个精度比较高、定位稳定的标签作为参考基站,参考基站将被放置在定位区域的中心。在以参考基站为圆心、半径3 m的圆上等距选择了10个点作为测试点并测量出它们的实际位置坐标。在这组实验中,主要想验证差分UWB室内定位系统在无外界干扰下的定位效果。
首先,关闭空调,并尽量减少可能出现的外界干扰。使用三个标签(A,B,C)依次在10个测试点进行定位测试,获得共计30组原始定位坐标数据,与此同时还收集对应时刻的参考基站的定位坐标数据。然后利用参考基站的实际位置坐标与定位坐标数据形成差分校正数据,用来对标签的原始定位坐标数据进行校正,再利用加权滑动平均法对校正后的定位数据进行处理,形成更为精准的标签定位坐标。最后,根据测试点的实际位置坐标分别求出EVK系统与DUIPS的各次定位误差,实验结果如图6所示。
在无外界干扰的条件下,EVK系统的标签定位误差在18~29 cm之间变化,平均误差为24.42 cm。在经过差分校正数据和加权滑动平均法处理之后,DUIPS的标签定位误差在16~24 cm之间变化,平均误差为20.13 cm,定位整体误差降低17%。
3.3 外界干扰下的实验
本实验主要是为了验证在有外界干扰的条件下,EVK系统与DUIPS的定位效果。在本实验里,打开基站附近的空调,以增加外界干扰,然后按照与前次实验相同的流程进行实验。实验结果如图7所示。
由图7可知,在受到外界干扰的条件下,EVK系统的标签定位误差明显变大,同时起伏的范围更大了。此时,EVK系统的标签定位误差在21~36 cm之间变化,平均定位误差为28.87 cm。而DUIPS的标签定位误差在18 ~27 cm之间变化,平均定位误差为22.23 cm,定位整体误差降低23%。
3.4 实验分析
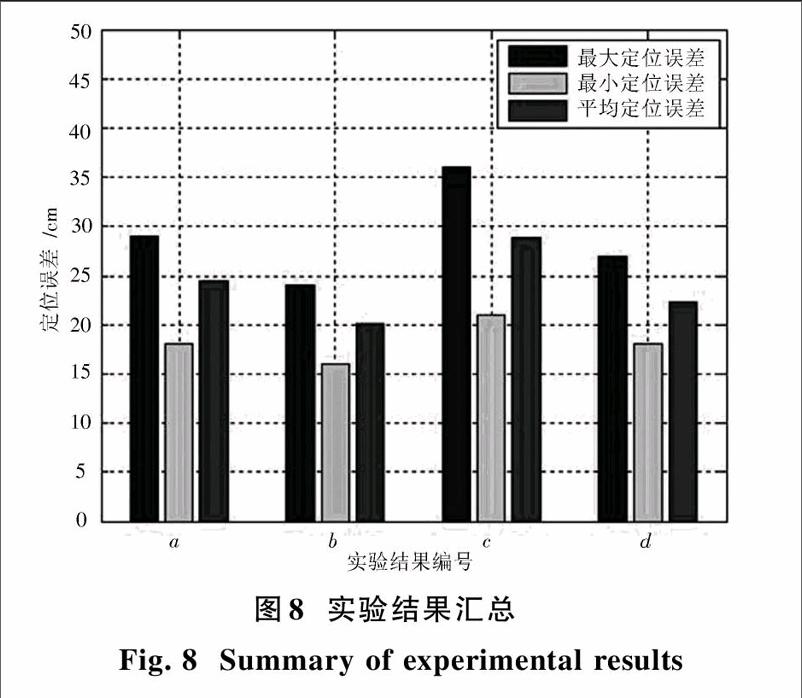
将两个实验的结果进行了汇总,形成了一个对比直方图,如图8所示。
结果a与b分别是在无外界干扰时EVK系统与DUIPS的实验结果,结果c与d分别是在有外界干扰下EVK系统与DUIPS的实验结果。对比结果a与b可知,在无外界干扰时DUIPS的定位误差小于EVK系统的,而且误差变化的范围有所缩小,定位变得更稳定。对比结果a与c可知,当受到外界干扰时,EVK系统的定位误差将显著增大,误差变化范围也随之扩大。与结果a、结果b和结果c相比,结果d表明,DUIPS的定位误差远小于EVK系统的,即能够在很大程度上减小由外界干扰引起的定位误差,进一步压缩误差变化范围,尽管无法达到无外界干扰时的定位效果,但其定位效果仍然优于EVK系统在无外界干扰下的定位效果。
4 结 语
在UWB室内定位系统中,受时钟同步误差、NLOS、外界干扰等的影响,造成系统的定位误差变大、定位稳定性差。本文提出的差分UWB室内定位系统,以差分UWB定位算法为核心内容,通过引入参考基站来形成差分校正数据,用以校正标签的定位坐标数据,并结合加权滑动平均法,最终形成更为精确的定位坐标数据。借助基于TDOA算法的UWB定位系统来进行相应的对比测试,测试结果表明,差分UWB室内定位系统能够有效降低系统定位误差,提高系统的定位稳定性,特别是在受到外界干扰的情况下,定位整体误差降低23%。
参考文献
[1] HIGHTOWER J, BORRIELLO G. A Survey and taxonomy of location systems for ubiquitous computing [J]. IEEE Computer, 2001, 34(8): 57?66.
[2] 杨洲,汪云甲,陈国良,等.超宽带室内高精度定位技术研究[J].导航定位学报,2014,2(4):31?35.
YANG Zhou, WANG Yunjia, CHEN Guoliang, et al. Research on high precision indoor positioning technology of UWB [J]. Journal of navigation and positioning, 2014, 2(4): 31?35.
[3] 王彪,傅忠谦.基于超宽带技术的TDOA室内三维定位算法研究[J].微型机与应用,2013,32(14):83?86.
WANG Biao, FU Zhongqian. The research of TDOA indoor three?dimensional positioning algorithm based on ultra?wideband technology [J]. Microcomputer and its applications, 2013, 32(14): 83?86.endprint
[4] YILDIRIM K S, KANTARCI A. Time Synchronization Based on Slow?Flooding in Wireless Sensor Networks [J]. IEEE transactions on parallel & distributed systems, 2013, 25(1): 244?253.
[5] 杜娟.超宽带室内定位技术及其干扰分析方法研究[D].西安:中国科学院研究生院,2012.
DU Juan. Research on UWB indoor positioning technology and its interference analysis method [D]. Xian: Graduate University of Chinese Academy of Sciences, 2012.
[6] 张志良,孙棣华,张星霞.TDOA定位中到达时间及时间差误差的统计模型[J].重庆大学学报(自然科学版),2006,29(1):85?88.
ZHANG Zhiliang, SUN Dihua, ZHANG Xingxia. Statistical model on the time and time difference error of arrival in TDOA location estimation [J]. Journal of Chongqing University (Natural science edition), 2006, 29 (1): 85?88.
[7] 刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2008.
LIU Jiyu. Principle and method of GPS satellite navigation positioning [M]. Beijing: Science Press, 2008.
[8] 陈樱婷,王峰,刘浩成.差分GPS定位技术的原理和应用研究[J].电脑知识与技术,2014,10(25):5842?5843.
CHEN Yingting, WANG Feng, LIU Haocheng. Research on the principle and application of differential GPS positioning technology [J]. Computer knowledge and technology, 2014, 10(25): 5842?5843.
[9] 杨杰,张凡.高精度GPS差分定位技术比较研究[J].移动通信,2014(2):54?58.
YANG Jie, ZHANG Fan. Comparison and research of high?precision GPS differential positioning technology [J]. Mobile communications, 2014(2): 54?58.
[10] 裴益轩,郭民.滑动平均法的基本原理及应用[J].火炮发射与控制学报,2001(1):21?23.
PEI Yixuan, GUO Min. The fundamental principle and application of sliding average method [J]. Journal of gun launch & control, 2001(1): 21?23.
[11] 杨慧,许福栗.基于权重转移的加权滑动平均模型改进[J].计算机工程与应用,2014,50(14):156?159.
YANG Hui, XU Fuli. Improvement of weighted moving average model based on transferring weights [J]. Computer engineering and applications, 2014, 50(14): 156?159.endprint
