安谷水电站主厂房400 t+400 t/16 t桥式起重机设计
2018-03-12黄文峰,吴思够
黄 文 峰, 吴 思 够
(中国水利水电夹江水工机械有限公司,四川 夹江 614100)
1 工程概述
大渡河安谷水电站位于四川省乐山市境内,是大渡河下游最后一个梯级电站,为以发电为主,兼顾防洪、航运、灌溉、供水等综合利用的大(2)型水电工程。安谷水电站主厂房内设置的1台400 t+400 t/16 t双小车桥式起重机担负着电站4台、单机额定功率为190 MW的水轮发电机组及其辅助系统设备的安装、运行维护和检修的吊装任务。
2 设备构成及工作原理
主厂房400 t+400 t/16 t桥式起重机1台,其总布置图见图1。
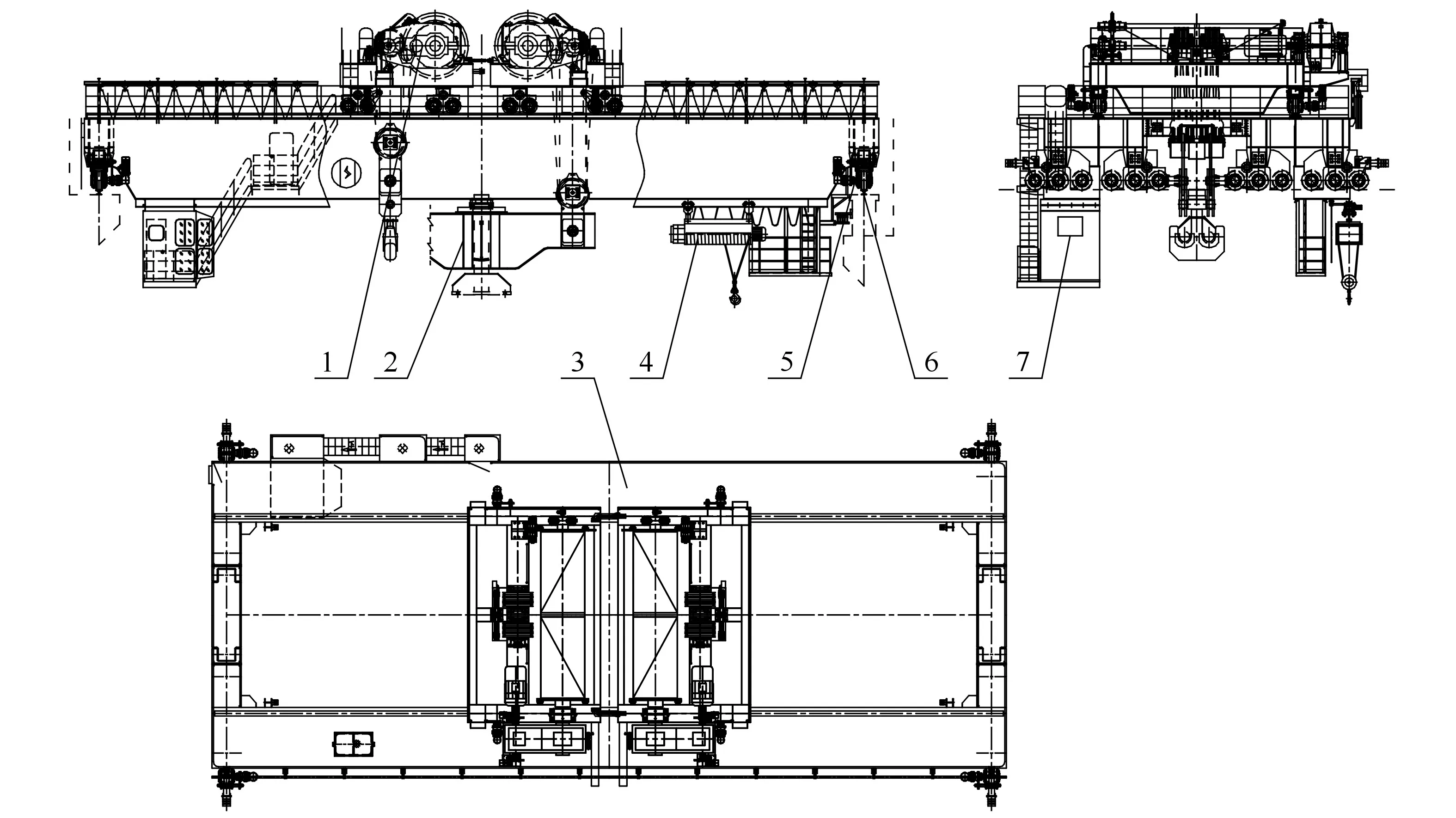
1. 小车 2.平衡梁 3.桥架 4.16 t电动葫芦 5.大车行走机构 6.大车轨道装置 7. 司机室图1 主厂房400 t+400 t/16 t桥式起重机总布置图
桥机主要由两台小车、大车行走机构、桥架、16 t电动葫芦、梯子平台栏杆、司机室、电气设备、大车轨道装置等组成。整机配有400 t吊钩1套、100 t吊钩1套,可方便地实现小车吊具侧板与主副钩、平衡梁的装卸,以达到不同的使用要求。
桥机安装于主厂房392.836 m高程的轨道上,司机室布置在桥机上游侧的主梁下,16 t电动葫芦布置在桥机外侧主梁的副腹板下方,在16 t电动葫芦旁设有检修吊篮以方便对16 t电动葫芦进行维护和检修。
平时,可根据重物所处的位置使用桥机的1台小车吊运起重量为400 t以下的重物。当吊运起重量大于400 t而又小于800 t时,则需要桥机的2台小车并车共同吊运,此时,应先将2台小车开到一起,通过设在小车两头上的并车用机械连杆将两小车连锁在一起,再在两小车的主钩侧板上挂专用平衡梁,通过电气同步即可实现二小车共同抬吊的操作。
3 设计特点
3.1 小 车
对于这种起重量达到800 t的大型桥机来说,如果采用单小车结构,小车的结构相当庞大,小车和桥架的主梁承受的力也相对较大,不仅加重了桥机的自重,而且增加了整个桥机的宽度和高度。而采用双小车加平衡梁的结构形式,小车在单主梁上的轮压由两个点分散到四个点上,从而大大降低了起吊重物时对主梁产生的集中负载,有效减小了主梁的外形尺寸。
3.1.1 起升机构
起升机构由电动机、带制动盘联轴器、制动器、定滑轮装置、动滑轮组、平衡杠杆装置、换挡减速器、轴承座和卷筒组成。起升机构采用全封闭传动,主要由一台变频电动机通过带制动盘联轴器与减速器高速轴连接,减速器低速端通过轴承座上的轴带动双联卷筒转动,卷筒上的钢丝绳又通过动滑轮组和定滑轮装置带动吊具的升降,实现物品的吊运。
主要技术措施:
(1)换挡减速器采用悬浮支撑,增加了电动机侧的空间,使定滑轮能够布置在电动机的同一侧,起升机构的结构变得更加紧凑,定滑轮装置放在小车架的定滑轮梁上,以方便对定滑轮的安装和维护。
(2)卷筒两端的支撑轴承座固定在行走梁上,使卷筒体下沉到两行走梁之间,从而使卷筒的最高点与定滑轮最高处的高度基本一致,有效降低了小车的高度。
(3)卷筒输入端轴承座采用双轴承形式,双轴承两端分别与卷筒和减速器采用花键形式连接。由于轴承座采用双轴承,避免了单轴承时卷筒和减速器两端受力不平衡而使卷筒产生倾斜。
(4)减速器抗扭支撑点设在减速器高速端箱体的下面,从而实现了减速器的固定与力矩的平衡。
(5)减速器采用机械换挡变速结构,换挡的速比范围为1∶4,重载时起升速度为0.15~1.5 m/min,轻载时起升速度为0.6~6 m/min,实现了桥机重载低速、轻载高速的使用工况,从而大大提高了桥机在轻载时的工作效率。
(6)卷筒为双联卷筒,单层缠绕的钢丝绳压在卷筒两端的制动盘和连接轮毂上,缩短了卷筒的6个钢丝绳节距约258 mm,有效减小了卷筒的长度,压缩了整个桥机的宽度,扩大了桥机的有效工作范围。
3.1.2 小车行走机构
每台小车的行走机构均采用分别驱动,共设有8个车轮,每侧各1个主动车轮和3个从动车轮,呈对称布置。驱动装置采用“三合一”结构型式,由带制动器的变频电动机与减速器高速轴连接,减速器低速端直接带动车轮转动,实现小车的行走。
小车行走采用分别驱动方式,各驱动装置采用电动机、制动器、减速器“三合一”套装结构。电动机与车轮组之间实现全封闭传动,减速器输出端与主动车轮轴采用花键方式连接以便于安装,小车运行平稳,其效率大大提高;车轮组采用新型45°剖分式车轮组,具有方便现场小范围调整车轮偏斜的功能,使车轮处于最佳接触状态;台车与机架之间采用剖分铰连接以方便现场安装。小车行走机构大大简化了减速器布置在小车中间位置集中驱动的传统结构,给起升机构在小车架上的布置让出了全部空间,方便了小车的整体布局,使小车整体更简单化。小车运行机构各组成部件与小车之间的连接简单明了,方便拆装和维护。
3.2 大车行走机构
大车行走机构共设有24组车轮,每组各1个主动车轮和5个从动车轮,呈对称布置。大车行走机构采用分别驱动,4个主动车轮每套驱动装置采用“三合一”的结构型式。
大车行走机构采用分别驱动方式,各驱动装置采用电动机、制动器、减速器“三合一”的套装结构。大车行走简化了传统结构,其驱动装置集成于一体,直接挂在行走台车架上,不再布置在桥机梁内腔端部,从而给驱动装置的安装和维护带来了极大的方便。车轮组采用新型45°剖分式车轮组,具有方便现场小范围调整车轮偏斜的功能,使车轮处于最佳接触状态。由于大车行走机构的主动车轮组与减速器采用花键连接,容易造成大车行走机构在运行时减速器向外串,为防止这种现象的产生,我们在减速器上的扭力盘固定座设置了可调节的螺栓结构,从而使大车行走机构在运行时更加平稳。
由于桥机跨度较大,为防止大车偏斜运行,产生啃轨现象,在桥机大车运行机构的上下游各设置了一套行走测速反馈编码器,采用两套变频器通过矢量控制,实现电气同步,设置了偏斜信号发生器并自动纠偏。
3.3 桥 架
桥架主要由主梁和联接梁构成,主梁与联接梁采用销轴柔性连接。
主梁的小车轨道下采用“T”型钢。由于小车的轮压很大,导致轨道下翼板和腹板的局部区域挤压应力较大,为避免焊缝处于高应力区域,在该处采用轧制的“T”型钢。由于“T”型钢处于高应力区域,其翼板及腹板厚度可根据计算选取,而梁体的翼板和腹板远离了因轮压造成的高应力区域,其板厚不再受小车轮压的影响而加大,从而有效降低了梁体的外形截面尺寸。
当轨道的轨顶面不在同一平面上时,如果主梁和联接梁采用刚性连接,就会造成各个车轮的受力不均;而采用主梁与联接梁销轴柔性连接可以使大车行走的各个车轮的轮压基本一致。整个桥机采用汽车运输方式,为控制运输尺寸,在主梁与联接梁之间增加了一个支座,支座与主梁采用螺栓连接,然后再由支座与联接梁销轴连接(图2),从而使主梁的运输单元宽度减少了520 mm,这种结构避免了主梁两端的两行走台车间分段及联接板和高强螺栓连接,且安装更容易,减少了工地安装的工作量,避免了工地安装误差。桥架主梁端部与大车行走机构的连接部位采用了如图3所示的新型结构。该结构不仅能保证梁体具有足够的强度,同时能有效降低大车轨面至小车轨面的高度差约500 mm,从而大大降低了桥机的整机高度。
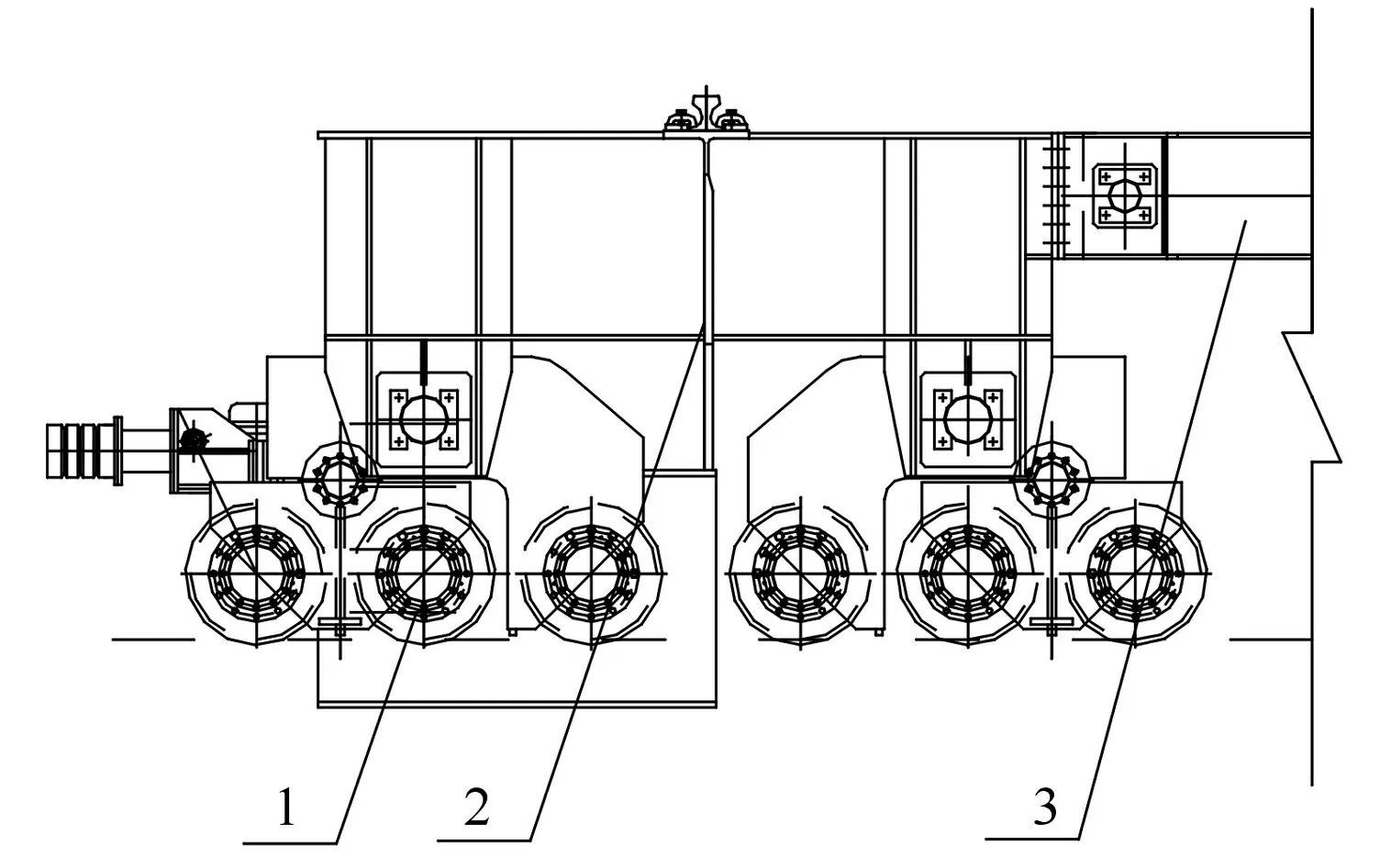
1.大车行走机构 2.主梁 3.联接梁图2 主梁与大车行走机构联接结构图
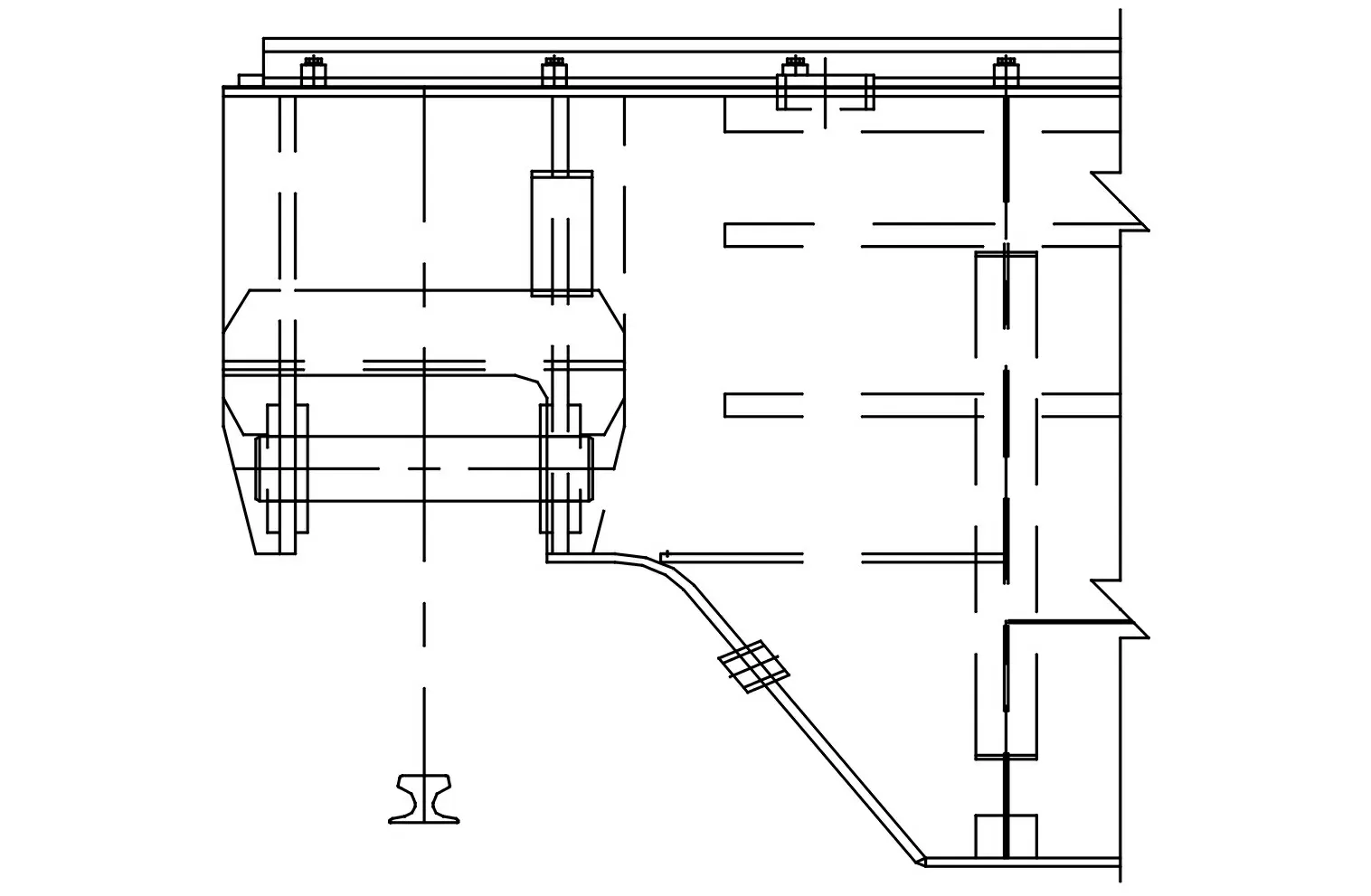
图3 主梁端部与大车行走机构联接处结构图
由于起升载荷大,导致小车的轮压过大,一般不采用正轨梁结构,而采用宽偏轨箱型梁结构,主梁采用偏轨箱型梁结构。梁内布置桥机电气控制系统,梁两端设隔离门,内设空调等降温防潮除湿设备,可有效防止厂房的潮湿环境对电气设备的不利影响,从而提高桥机的使用可靠性。
对于这种跨度大、载重量大的桥机,我们采用有限元方法对桥机的桥架多工况进行了计算分析,对该桥机的整体力学结构的掌握、结构的改进和进一步优化设计具有十分重要的意义。根据桥架的受力情况,将其简化为对单根主梁进行有限元分析。采用了两种最不利的工况进行有限元分析:小车位于跨中位置,起吊满载载荷400 t+400 t时(图4、5),主梁的最大应力为165.6 MPa,最大挠度为30.56 mm;小车位于跨端位置,起吊满载载荷400 t+400 t时(图6)主梁的最大应力为175.7 MPa。主梁主材均采用Q345B,其应力和挠度均符合合同及规范要求。
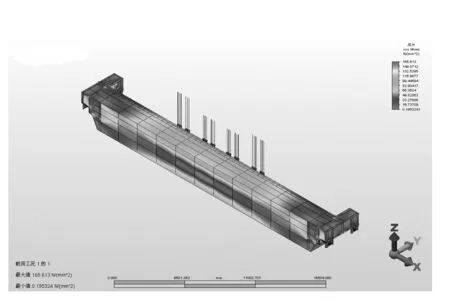
图4 满载时小车于桥机跨中主梁应力分布图
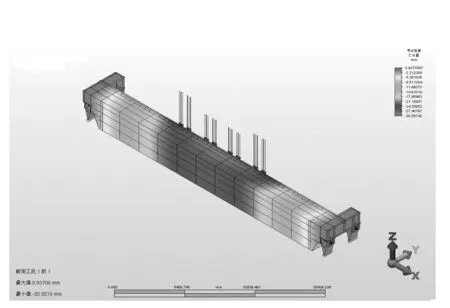
图5 满载时小车于桥机跨中主梁挠度变化图

图6 满载时小车于桥机跨端主梁应力分布图
安谷水电站主厂房桥机大车吊运的载荷及线路比较固定,由预拼装工位或检修区至发电机安装区位来回吊运,不同于通用桥式起重机,其载荷和路线是随机的。因此,主厂房桥机大车轮压也是按载重小车的实际位置计算提供。对于电站投资方来说,降低桥机的大车轮压,就减小了桥机轨道承重梁的负载。对于长度达上百米的厂房,意味着节约了巨大的投资成本。
桥机的起升及行走均采用交流变频,其减小了对整个机构的冲击,提高了机构的寿命。我们依托现代计算机设计平台,充分利用CAD软件技术、钢结构有限元智能分析虚拟现实和动态仿真等现代化的设计方法,避免了大量的手工计算,使计算更准确,从而采用了更合理、经济的结构。将车轮组、滑轮组等部件进行模块化设计,使设计人员从大量的重复劳动中解放出来,节约了大量的设计周期。
4 结 语
安谷水电站主厂房400 t+400 t/16 t桥式起重机于2013年9月30日通过了特种设备型式试验,正式投入使用,现已顺利完成电站所有发电机组及其辅助系统设备的安装吊装任务。该桥机的成功研发,对类似大吨位、超低净空、结构简单、集成化、工作范围广、可调速度范围大的桥式起重机设计具有一定的参考价值。
[1] 通用桥式起重机设计规范,GB/T14405[S].
