国外对潜通信技术发展研究
2018-03-12杨坤,杜度
杨 坤,杜 度
(中国人民解放军92857部队,北京 100161)
0 引 言
现代潜艇作战战略的观点认为,潜艇的隐蔽性由其下潜的深度、航速及航向机动等特点来保障,在不限制潜艇机动性的同时,保障获得信息的能力,是对潜通信技术发展的重点[1]。虽然近年来蓝绿激光通信技术、中微子通信技术等新型通信方式得到了快速发展,但仍没有实际应用于潜艇通信领域[2],目前国外潜艇主要运用无线电、水声等通信手段,水下通信方式可总结为2类(见图 1),各通信方式的作战使用范围、通信速率、通信距离等见表 1。
1 战略通信
战略通信主要利用岸基甚低频(VLF)或超低频(ELF)信号对潜进行单向通信,单个信号站根据频率的不同对潜通信距离为4 000~8 000 km。ELF(3~300 Hz)通信技术要求潜艇必须拖拽电缆或拖曳带天线设备的浮标以接收ELF信息。这样的布置对潜艇的性能是有不利影响的。与VLF一样,ELF通信技术需要有非常庞大的岸基设备以及专用的电源来运转,因而,目前只有美国和俄罗斯建成了用于潜艇通信的ELF 系统[3]。
目前国外潜艇可在水下45~70 m的深度上利用展开的天线浮标接收VLF信号,传输速率为50~200 bps,此时潜艇航速不超过4 kn,天线浮标保持在水下6~9 m,如图 3所示。
ELF比VLF频率低100倍左右,因此可以实现最大约100 m深度的对潜通信。美国于1989年成为首个建成使用ELF对潜通信系统的国家,通过位于本土的ELF发信台,美国可向4 600 km外水下122 m深(天线距海面102 m)并以16 kn航速航行的核潜艇发送一份20个字符的报文,还能与在北极9 m厚冰层下120 m深海中以16 kn航速航行的核潜艇进行联络。
虽然ELF通信深度和距离均较VLF有较大提升,但其发信速度很慢,美国ELF发信台每分钟只能发射一个比特(约0.016 7 bps),5 min发射一个字符,15 min才能发射一个3字符的指令。实际作战使用中,ELF通信主要起到“振铃”作用,即通知核潜艇上浮到可以采用其他通信方式的深度继续接受详细信息。
俄罗斯于1998年研制了耐压壳体放缆的K-697型拖曳天线装置,将布放点转移到垂直尾稳定鳍或者尾部甲板室上面,大大提高了备用缆式天线的使用及水下状态替换天线的能力,同时研制的直径16 mm、馈电衰减降低的电缆长度也加增加至1 000 m,拖曳天线装置内嵌入有(超长波-长波-中波-短波频段)信号放大器,保证了长波频段宽带通信线的信号接收。此外,馈电衰减降低且具有嵌入式放大器细浮缆的成功研制,加大了潜艇使用细浮缆的航行深度[4]。
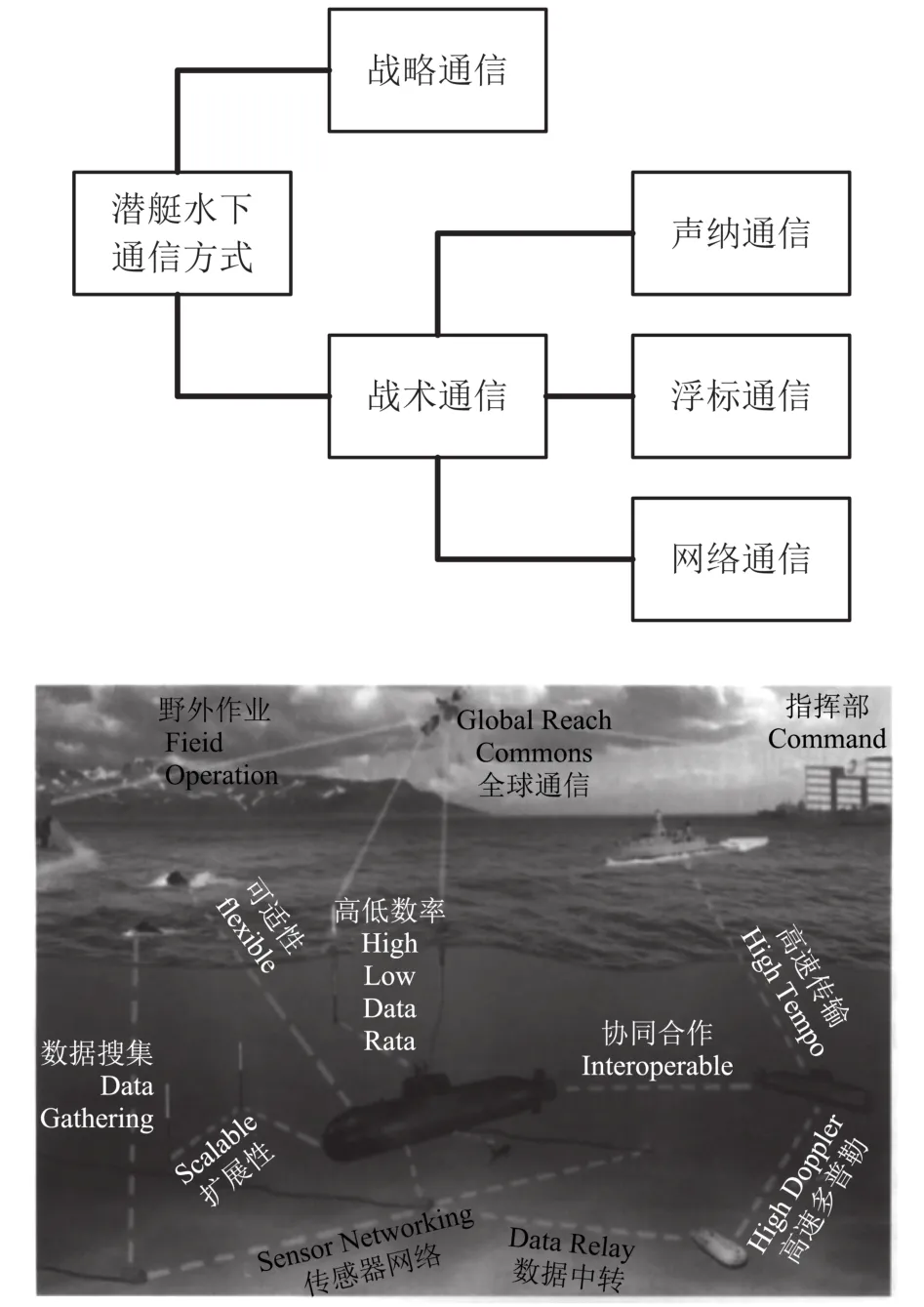
图 1 当前潜艇水下通信方式Fig. 1 Submarine underwater communication
2 战术通信
2.1 声呐通信
声呐通信利用通信声呐实现,通信声呐一般利用艇首声呐作为换能器,通信时甲方发射机产生信号通过艇首声呐向乙方定向发出,乙方通过艇首声呐接收后经由接收机处理得到通信信息[5]。
当前潜艇多装备综合性声呐,同时具有探测、目标跟踪、测距、识别、定位、通信、导航和探雷等多种功能,即所有潜艇均具备声呐通信能力,如美国“洛杉矶”级和“海狼”级攻击型核潜艇上装备的AN/BQQ-5型综合声呐,该声呐中包括AN/WQC-2型通信声呐,相关技术参数如表 3所示。
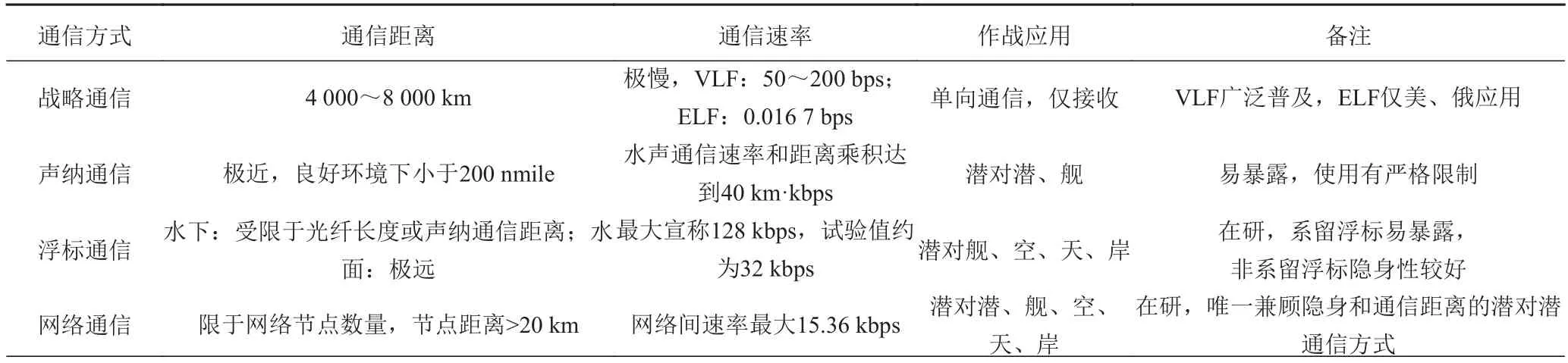
表 1 潜艇水下通信方式特征分析Tab. 1 Submarine underwater communication characteristics analysis
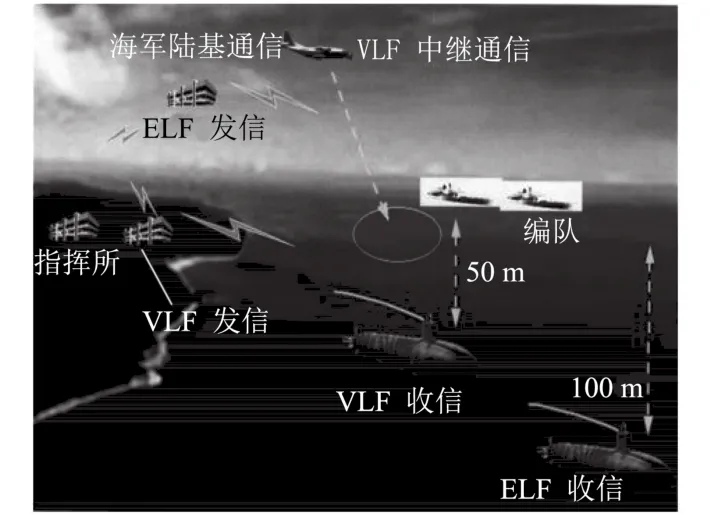
图 2 美国海军战略通信系统组成示意图Fig. 2 Schematic diagram of the U.S. Navy's strategic communications system
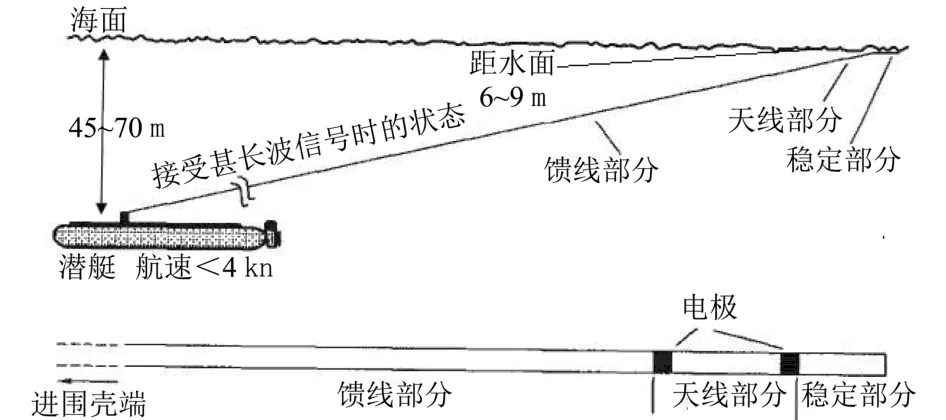
图 3 潜艇在水下利用拖曳天线浮标接收VLF信号Fig. 3 The submarine uses a towed antenna buoy to receive VLF signals underwater
声呐通信的通信速率与水声通信技术发展息息相关,根据美国海军研究办公室(ONR)统计的数据,当前水声通信的速率和距离乘积达到40 km·kbps,即距离为40 km时水下通信速率最大为1 kbps。声呐通信随着声呐与水声技术的进步而不断向前发展,未来通信距离将更远、通信速率会更快。然而,声呐通信与浮标通信、网络通信方式相比较,发展速度极慢,在通信距离和速率上很难发生革命性变化,导致完全无法满足潜艇间以及潜艇与其他部队之间的高效协同作战。
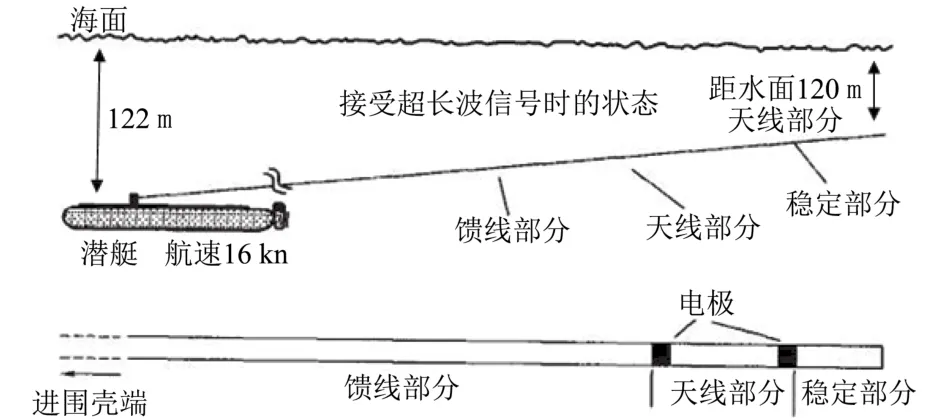
图 4 潜艇在水下利用拖曳天线接收ELF信号Fig. 4 The submarine uses the towed antenna to receive ELF signals underwater
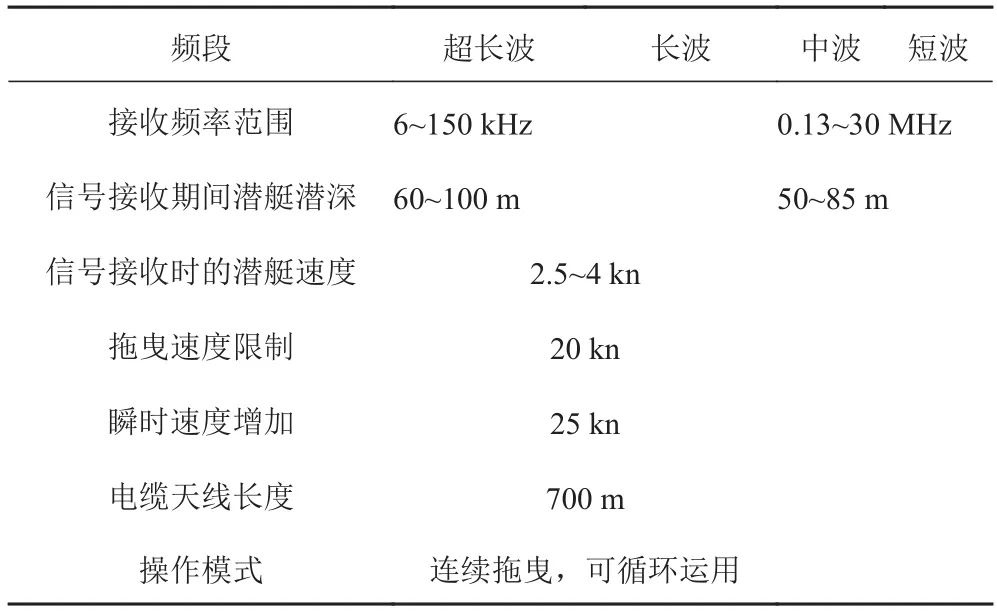
表 2 K-697型拖曳天线装置基本性能Tab. 2 K-697 towing antenna device basic performance

图 5 K-697型缆式拖曳天线装置Fig. 5 K-697 towing antenna device
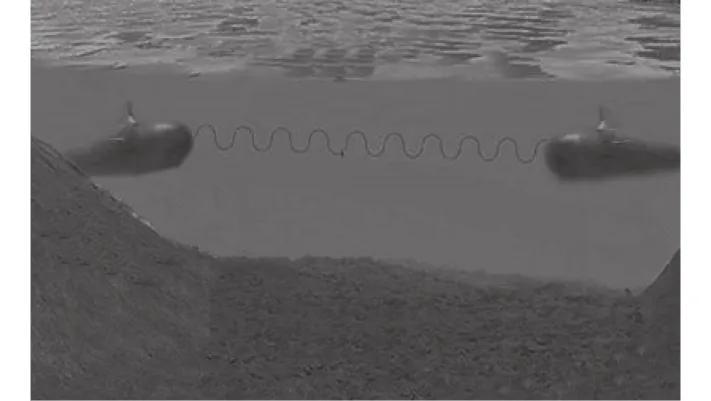
图 6 潜艇声呐通信示意Fig. 6 Submarine sonar communication schematic

表 3 AN/WQC-2通信声纳技术参数Tab. 3 AN/WQC-2 communication sonar technical parameters
2.2 浮标通信
浮标通信是通过潜艇发射的浮标与水面舰艇、飞机和岸上基地等平台进行双向通信,如图 7所示。目前潜艇浮标通信技术正不断完善并逐渐提高性能,使通信时巡航速度更快、下潜深度更大、通信速率更高,需要注意的是,浮标通信技术出现之前,潜艇只能上浮至潜望镜状态,通过伸出通信天线实现双向通信[6 – 7]。
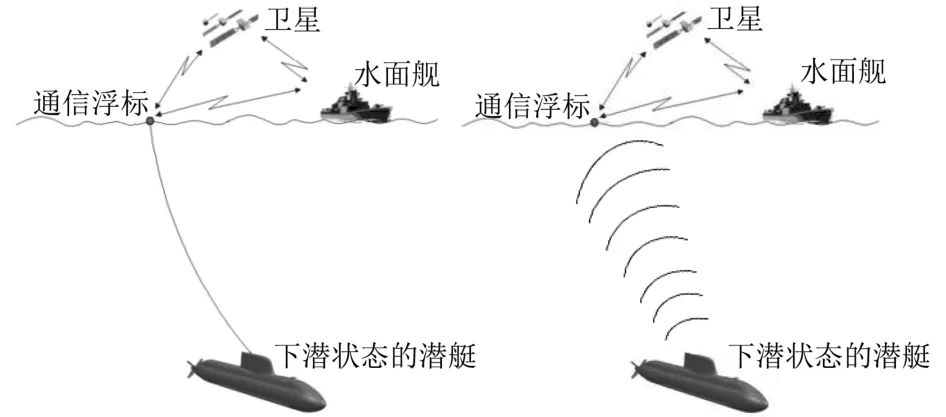
图 7 潜艇有线、无线浮标通信示意Fig. 7 Submarine wired, wireless buoy communications indicate
根据国外公布的相关消息,目前只有美国和德国潜艇具备浮标通信能力,其中美国浮标通信能力来自“巡航状态下潜艇双向通信”(CSD)项目,德国212A级潜艇已装备“木卫四”(Callisto)潜艇浮标通信系统。
1)美国“巡航状态下潜艇双向通信”(CSD)项目
“巡航状态下潜艇双向通信”项目是美国海军构想的水下通信网络的关键,用于解决当前潜艇必须上浮或减速航行才能对外通信的问题,并且改变处在潜航状态的潜艇只能单向通信的现状。“巡航状态下的通信”项目将为“洛杉矶”级、“海狼”级和“弗吉尼亚”级攻击型核潜艇及“俄亥俄”级巡航导弹核潜艇提供通信能力,并为“俄亥俄”级弹道导弹核潜艇提供有限的通信能力。
2007年12月,美海军成功地完成了浮力电缆天线通信试验,潜航的美海军“洛杉矶”级“蒙特培利尔”号攻击核潜艇使用浮力电缆天线与美海军“杜鲁门”号航母打击群的8艘水面舰艇进行了双向信息交换,数据率为9.6 kbps。2008年依靠水声通信与潜艇交互,水下通信距离最大150 nmile,最小30 nmile。目前,美国已研制出可回收系留光纤浮标,该浮标能使潜艇在水下243.84 m(800 ft)航速为8 kn的状态下,通信数据率达到32 kbps。2012年洛克希德·马丁公司声称整个“巡航状态下潜艇双向通信”项目能使潜艇在任意深度和速度下达到2.4 kbps的通信速率;在低于15 kn航速时通信速率可达到2.4~9.6 kbps;低于8 kn航速潜深小于100m通信速率可达到9.6~128 kbps。
2)德国已装备的“木卫四”(Callisto)潜艇浮标通信系统
根据《2013-2014简氏舰艇年鉴》以及德国前几年的规划,德国已在最新的2艘212A级常规潜艇上装备了“木卫四”(CALLISTO)潜艇水下通信系统,该系统利用可重复使用的拖曳通信浮标与外界通信,该浮标能发射和接收超高频、甚高频、高频以及GPS等信号,但通信速率并未公布。
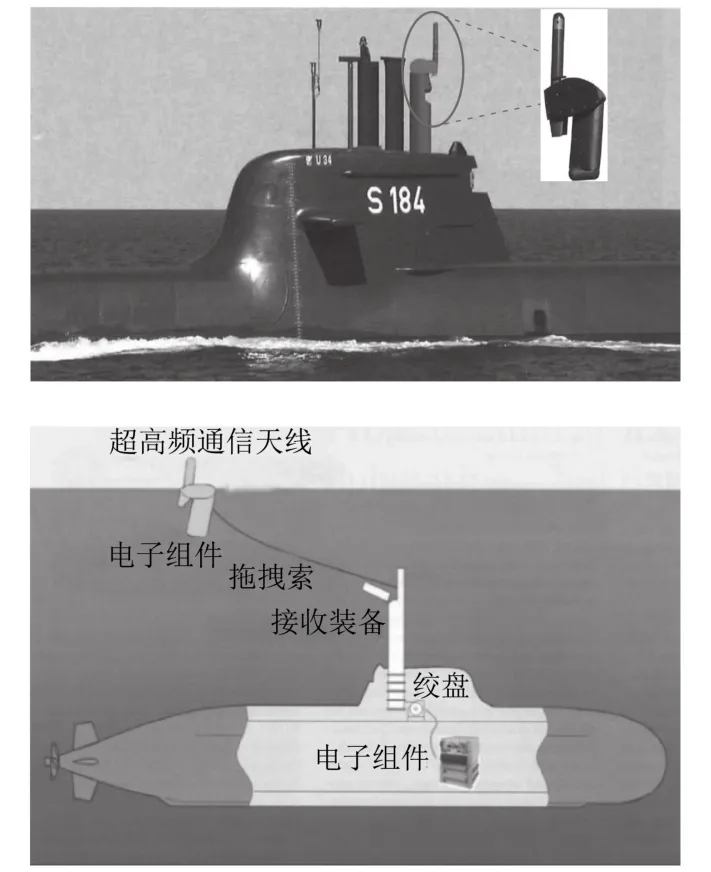
图 8 212A级U34号潜艇上安装“木卫四”通信系统及示意图Fig. 8 212A-class U34 submarine installed Callisto communication system and schematic
浮标通信由于通信速率高、距离远受到国外海军强国的广泛关注,成为未来潜艇水下通信方式的发展热点之一。然而,浮标通信在一定程度上增加了潜艇暴露概率(特别是系留浮标),同时并未解决潜艇之间的远程通信问题,为了既满足潜艇隐身要求,又使潜艇水下通信速度快、距离远,美国开始构建基于水下网络的潜艇网络通信能力。
2.3 网络通信
网络通信是潜艇在水下利用声呐通信与最近的水下网络节点交互,然后由预置水下网络将信息传递到远处其他平台的一种通信方式。其中水下网络可以是无线连接也可以是有线连接,前者传输速度受水声通信技术限制,后者受线缆铺设范围和成本限制,如图 9所示。
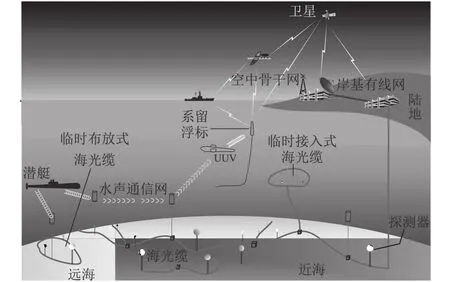
图 9 潜艇水下无线、有线网络通信示意Fig. 9 Submarine underwater wireless, wired network communication shows
美国海军自1998年起多次进行“海网”(Seaweb)项目的水声通信网络试验,旨在形成海底水声传感器网络,通过水声通信链路将固定节点、移动节点和网关节点连接成网,采用电池智能供电,覆盖范围可达100~10 000 km2,除通信外其功能还包括测距、定位和导航。如图 10所示。
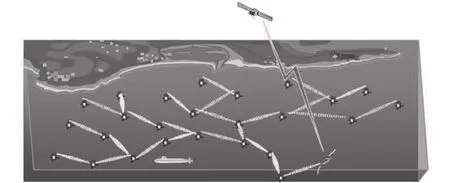
图 10 “海网”网络拓扑结构及通信链路Fig. 10 Seaweb network topology and communication links
此外,美国还在1996–2000年之间对潜艇利用UUV连接海底光缆的水下有线网络通信方式进行了研究,但目前项目处于停滞状态,项目作用原理示意如图 11所示。
该方式的主要缺点是水下网络需要提前部署,且潜艇需要航行至预定网络通信节点才能进行通信,应急使用能力差。为此美国已开始研制临时迅速部署的水下网络系统,如2006年开始研制的近海持续水下监视系统(PLUS),该系统除具备监视能力外,还具备通信能力,相关网络节点由潜艇自身携带,根据作战需要进行布放,将远方信息传递至潜艇。该项目已于2013年10月完成海上测试,目前正处于小规模部署进行作战评估阶段。
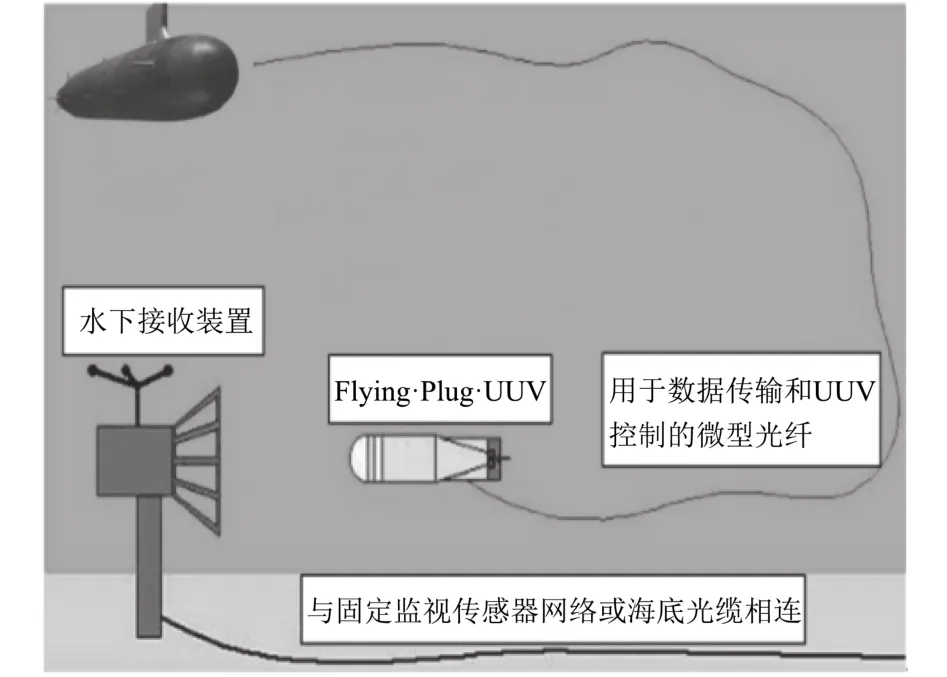
图 11 潜艇利用UUV连接海光缆进行水下有线网络通信Fig. 11 Submarines use UUV to connect underwater fiber optic cable for underwater wired network communication
3 总 结
总的来说,战略通信目前基本维持现有技术水平;战术通信中声呐通信仍保持40 km·kbps的水声通信距离与速率乘积,作战中易暴露自身位置,仅在确保安全情况下近距离水下通信使用;浮标通信使潜艇可以与其他水面及水面以上平台协同作战,但潜艇之间的通信问题仍然存在,且浮标通信也容易暴露潜艇位置;网络通信是唯一兼顾潜艇隐身和远程通信的解决方案,可实现潜艇与潜艇协同作战,极大提高潜艇作战效率,是未来的重要发展方向。
[1]方传顺. 潜艇通信天线[M]. 北京: 海潮出版社, 2005.
[2]Digital sonar design in underwater acoustics: principles and applications[M]. Springer, 2012.
[3]陈卫东, 王永斌. 潜艇ELF拖曳环天线的热噪声研究[J]. 舰船科学技术, 2004, 26(2): 55–57.CHEN Wei-dong, WANG Yong-bin. Study on thermal noise of submarine ELF towed loop antenna[J].Ship Science and Technology, 2004, 26(2): 55–57.
[4]陶雯, 陈鼎鼎, 何宁宁. 国外海军潜艇通信技术与装备发展[J].通信技术, 2015, 48(4): 376–381.
[5]刘翠海, 王文清. 外军潜艇通信关键技术与发展趋势[J]. 电讯技术, 2011(7): 187–191.LIU Cui-hai, WANG Wen-qing. Key technology and developing trend of foreign navies'submarine communications[J]. Telecommunication Engineering, 2011(7):187–191.
[6]卫种华. 面向水声浮标/潜标应用的通用存储与通信系统设计[J]. 声学技术, 2011, 10(3): 380–382.WEI Chong-hua. Design of a general storage system and communication system in underwater acousite buoyand submersible buoy applicaion[J]. Technical Aeousties, 2011,10(3): 380–382.
[7]浦海兵. 潜艇通信天线的结构设计研究[J]. 舰船科学技术,2008, 11(30): 62–65.PU Hai-bin. The sduty on structure design of submarine communication antenna in futur[J]. Ship Science and Technology, 2008, 11(30): 62–65.
