微型机器人在短波发射机冷却水路清洁中的运用
2018-03-11左德仁刘冰阳
左德仁 刘冰阳
1 短波发射机冷却水路管道清洁现状
目前,短波发射机冷却水路管道都是由技术维护人员进行清洁维护。一方面,人力清洁比较复杂、费力、费时,且部分死角(如蒸发锅回水管)很难清洁干净。另一方面,波段冷却水路管道呈螺旋状且口径太小,没有办法进行清洁,波段如图1所示。

图1 螺旋状波段冷却水路管道
为了减轻发射机清洁检修强度,解决部分冷却水路无法清洁、死角清洁不干净等难题,提高发射机水路冷却质量,本文对微型机器人在短波发射机冷却水路清洁中的运用进行了思考分析。
2 关键技术的思考
要实现微型机器人清洁发射机冷却水路管道内壁的功能,必然要求机器人的材质轻巧、体积足够小、翅膀韧性足够好且能在狭小的空间内自如行动。设计微型机器人的关键技术为翅膀、动力和控制,现进行思考如下。
2.1 翅膀的思考
翅膀的结构和形状应设计得足够小,使其能够轻松进入口径很小的管道内;翅膀要求轻且坚固,保证在振动清洁过程中不会断裂;为翅膀提供足够的动力,满足翅膀高频振动的需求。翅膀的设计必须以昆虫结构和运动特性的研究为基础,提取精髓并进行简化,从而开发出更具灵活性和更优运动性能的翅膀。
2.2 动力的思考
微型机器人的外形较小、质量轻,要求驱动马达功率高、能耗小,保证翅膀振动较长时间,完成整个管道内壁的清洁。目前,微型电动机有微型涡轮机、热光电发电机等,可利用化学电池、燃料电池、太阳能电池作为能源,但这类能源较重,提供能量小,且与检修环境不相适应。从机器人对质量和大小的要求来看,微型电池和电机是首选。
2.3 控制的思考
控制系统的关键在于高度控制和稳定性控制。受微型机器人质量和体积小及工作环境的约束,控制系统的实现非常困难。目前的水平要实现复杂的控制是不现实的,必须进行简化,一方面把条件简化,另一方面采用多级简单控制。控制系统的设计以智能分布式控制系统的发展为基础。
3 机器人结构设计
考虑到发射机冷却水路管道口径小、弯道多等特点,参考仿昆虫爬行、飞行机器人现有研究设计成果,联系短波发射机清洁检修工作实际,微型机器人应由大脑、眼睛、翅膀、腿、心脏构成。
机器人的大脑采用一块基于高性能、低功耗微型嵌入式专用处理器与IBMPC标准完全兼容的PC/104中央处理器模块,工作频率700 MHz。主控板包含DMA控制器、中断控制器及定时器,外接后备电池,256 M字节DDR内存。另外,高性能显示控制器提供CRT和LCD显示器支持。编程语言采用C语言实现。
机器人的眼睛采用红外传感器,主要包括红外发射和接受两部分,应用编码/解码集成芯片实现操作控制。
机器人的“腿”设计成6条,由一个微型的伺服驱动马达提供动力,包括一个微型直流马达,一组变速齿轮,一个可调电位器及控制板。直流马达提供基本动力,产生较高的扭力。
机器人的翅膀由轻质清洁材料制成,便于清洁、清洗和更换,由微型马达提供动力,实现高频振动。
机器人的心脏由微型电池构成,给控制系统、驱动系统提供12 V的电压。
4 实现主要功能
微型机器人主要具备红外控制、沿壁爬行、振动清洁等功能,实现了发射机冷却水路清洁机器人化,减轻了技术维护人员工作强度。
4.1 红外控制
红外控制包括发射和接收两大部分,用集成电路进行操作控制,如图2所示。红外控制的发射部分主要包括编码调制、红外发送器等,当按下发射器后,就会发出遥控码,按键不同,发出的遥控码也会不同。该遥控码采用脉宽调制的串行码,以脉宽为0.56 ms、周期为1.125 ms的组合表示二进制“0”;以脉宽为0.56 ms、周期2.25 ms的组合表示二进制“1”。
遥控编码是连续的64位二进制编码,前32位是用户识别码,主要用来区别不同的电器设备,防止不同机类的遥控码相互干扰。后32位是功能码,功能码是8位,有128种不同组合的编码,用以实现其控制功能。
红外控制的接受部分主要包括光电转换器、解码电路等,由一个红外接受模块实现。该模块内部含有高频的滤波电路,专门用来虑除红外线合成的载波信号。当信号到达红外接受模块,就能得到发射器发出的编码,经单片机解码处理,就能得知按下哪个键,进而做出相应调整,完成整个红外控制动作。
4.2 沿壁爬行
沿壁爬行由微型的伺服马达控制实现,其原理如图3所示.
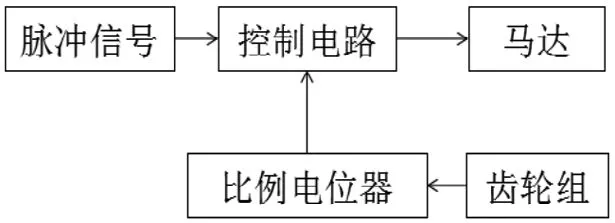
图3 伺服马达原理
控制端发送脉冲信号到控制电路,使驱动马达运转驱动减速齿轮运动,输出端带动一个线性的比例电位器检测位置,通过电压反馈给控制电路板,使马达正向或反向转动,进而控制机器人位置。
伺服马达有电源、地、控制三条控制线控制。电源线及地线给内置的直流马达和控制线路提供大约5 V的电压,伺服控制系统通过控制线将周期性的脉宽信号直接传递给伺服马达,该周期性信号的高电平脉宽在2 ms左右,低电平脉宽在20 ms左右,不同的脉宽对应不同的伺服马达输出臂。
4.3 振动清洁
振动清洁是该微型机器人的重要功能,实现对波段、蒸发锅回水管等发射机冷却水路内壁的清洁。机器人的内部另置一个电驱动的振动电机,让翅膀在垂直方向完成高频振动,但振动幅度不大,一般在3~5 ms。清洁过程中,一方面高频振动的翅膀能高效完成刷洗管道内壁的动作,另一方面频率超过500 Hz的振动能够让洗涤剂和水的混合物产生大量微小的气泡,气泡爆裂时产生的压力可深入清洁管道内壁。
5 结语
该微型机器人的设计能够极大解放发射机技术维护人员的双手,减轻检修维护人员的负担,提高发射机检修质量。相信在未来,随着机器人的快速发展,会有更多种类的机器人运用到发射机的值班、检修等工作中,有效确保发射机的安全播出。
[1]史智恒.大功率短波发射机水路的维护[J].电子制作,2014(22).
[2]黄伟.SW-50B短波发射机冷却水监测电路原理及故障预防[J].数字化用户,2017(9).
