智能送餐机器人设计
2018-03-09苏业环任军
苏业环+任军


摘 要:文章设计一款可实现送餐和回收餐盘的智能送餐机器人。首先对餐厅布局进行设计,然后进行机器人结构设计。机器人由自主行走单元和取放餐盘单元两部分组成,行走采用电磁轨道巡线原理,取放餐盘通过丝杆螺母传动装置实现;通过红外传感系统实现机器人避障与定位;最后通过有限元分析结果表明机器人结构稳定性强,设计可行。
关键词:送餐机器人;电磁循迹;餐盘回收
中图分类号:TP24 文献标志码:A 文章编号:2095-2945(2018)07-0032-03
Abstract: In this study, we designed an intelligent delivery robot which can realize the delivery and recovery of meals. First, the restaurant layout is designed, and then the robot structure is designed. The robot is composed of two parts: the autonomous walking unit and the plate delivery and recovery unit. The walking is realized by adopting the principle of electromagnetic track inspection, and the plate is taken out through the wire rod nut transmission device. The obstacle avoidance and localization of robot is realized by infrared sensing system. Finally, the results of finite element analysis show that the stability of the robot structure is strong, and the design of it is feasible.
Keywords: food delivery robot; electromagnetic track; plate recovery
1 設计背景
当前,机器人产业已经上升为国家“十三五”战略规划重点发展项目,成为国家“互联网+”和“中国制造2025”的新动力。在餐饮行业中,企业普遍刮起一阵“送餐机器人”风,中国送餐机器人近年来开启了爆发式增长模式。“送餐机器人”不单是一种与传统餐饮联合的工具,它是科技创新发展下的新形态。随着社会的发展,餐饮业传统的营销思维和经营思维将被彻底颠覆,而融合娱乐化、智能化、多样化、互动化的餐饮全新营销思路将成为主流。
2 总体方案设计
2.1 机器人送餐流程设计
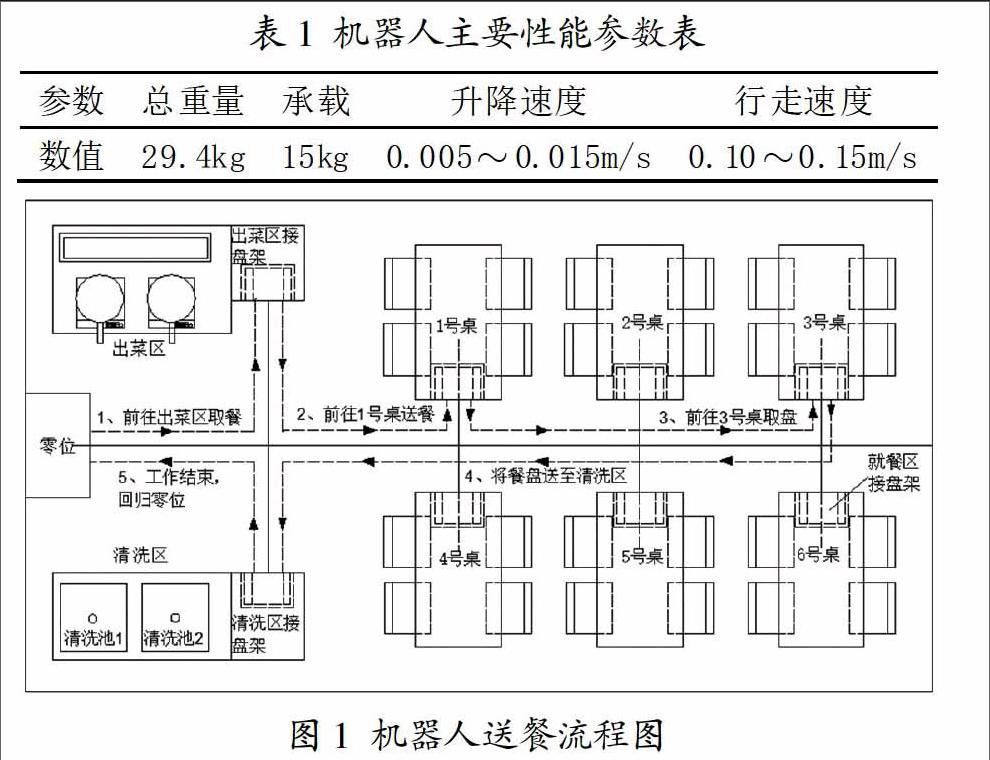
智能送餐机器人(后文中均简称“机器人”)送餐流程如图1所示。初始状态,机器人位于零位,依次完成1取餐、2送餐、3收盘、4送盘和5归零五个任务。具体工作步骤如下:
步骤1:取餐。机器人离开零位前往出菜区的接盘架上取餐。
步骤2:送餐。机器人送餐至指定餐桌(如1号桌)的接盘架上。
步骤3:收盘。机器人继续前往指定餐桌(如3号桌)接盘架上收拾餐盘。
步骤4:送盘。机器人将收拾的餐盘送至清洗区接盘架上。
步骤5:归零。机器人回归零位,等待下一次送餐指令。
2.2 机器人主要尺寸及性能指标
机器人总体尺寸为460×400×718,相关性能指标如表1所示。
2.3 机器人及接盘架结构设计
机器人总体示意图如图2(a)所示,接盘架(如图2(b)所示)是机器人取放托盘的场所,在餐厅布局的三个区域中(出菜区接盘架、就餐区餐桌接盘架、清洗区接盘架)均有使用到。接盘架与餐桌可通过紧固件、强力胶或者焊接等方式相连,具体连接方式取决于餐桌的材质,图2(c)为紧固件连接方式示例。图2(d)为机器人在接盘架上收餐盘的示意图。
2.4 机器人工作原理
机器人总体由取放餐盘单元和自主行走单元两大部分组成。取放餐盘单元由托盘,搁板,丝杆,螺母,直线轴承,电机组成。自主行走单元由后轮,电源,主动轮电机,主动轮,磁导航传感器组成。相应的工作原理如下。
(1)行走工作原理
机器人行走采用电磁轨道巡线原理,通过装在底部磁导航传感器导引沿着餐厅地面铺设的电磁轨道行走。机器人底座装有两主动轮和一个从动轮。两主动轮电机同向正转和反转可分别驱动机器人前进和后退,两电机反向转动则实现差速转动,实现机器人的转弯运动;若轨道上有人或其他的障碍物,餐车机器人会通过红外距离传感器探测到障碍物,然后进行语音提示。
(2)取、放餐盘工作原理
机器人取放餐盘动作受启发于物流行业中的叉车取放货物原理。机器人上装有红外距离传感器,当传感器检测到机器人到达接盘架处时,机器人开始取(放)餐盘工作。具体的,当丝杆螺母机构带动搁板向下运动时,将托盘搁置于接盘架上,即完成送餐作业;当丝杆螺母机构带动搁板向上运动时,从接盘架上取下托盘,即完成收拾餐盘作业。
3 相关部件选型
3.1 电机选型
本设计中共两处涉及电机选用,分别为驱动行走的主动轮电机和丝杆螺母传动用的电机,具体选型计算如下。
4 设计合理性及可行性分析
假定每次送餐三盘,总重量为15Kg,机器人等效应力分析如图3所示,X、Y和Z向位移变形如图4-图6。
有限元分析结果分析表明:
(1)机器人最大等效应力仅为4.659MPa(如图3),远小于材料铝6061的许用应力。因此,机器人工作安全可靠。
(2)在X、Y和Z三个方向中,机器人沿Y向变形量最大。如图5位移图,搁板垂直方向(Y向)的变形最大值仅为0.07785mm,可基本忽略。可见,该机器人稳定性强,设计可行。
参考文献:
[1]徐国保,尹怡欣,周美娟.智能移动机器人技术现状及展望[J].机器人技术与应用,2007(02):29-34.
[2]刘雪扬,张文斌,尹志宏.电磁传感器的循迹特性分析[J].传感器与微系统,2014(07):35-37+41.
[3]李巧艺.酒店服务机器人结构设计与运动控制研究[D].西南交通大学,2017,05.
[4]范超毅,范巍.步进电机的选型与计算[J].机床与液压,2008(05).
[5]袁银瑶,宋天麟.送餐服务机器人研究及设计[J].科技创新与应用,2017(04):62.endprint