一种支持向量机和数字图像相结合的能见度检测算法
2018-03-08刘南辉周海芳
刘南辉,周海芳,章 杰
(福州大学物理与信息工程学院,微纳器件与太阳能电池研究所,福建 福州 350116)
0 引言
能见度是影响高速公路行车安全重要因素之一[1]. 器测法和目测法是测量能见度常用的两种方法,其中基于透射法和散射法的能见度仪器测法应用较为广泛,但其具有安装复杂、 设备昂贵、 维护费用高、 操作复杂等不足之处[2]. 近年来,基于视频处理的能见度检测方法因其具有更接近人眼模式、 速度快、 成本低、 自动化程度高等优点广受国内外学者的青睐. Nicolas等[3]采用双目视觉来计算道路场景的能见度,但此方法需作特殊标记物,工作量大、 成本高; 陈启美等[4]提出采用小波变换提取图像边缘特征点方法计算道路能见度; 项文书[5]提出平均梯度算法和透射率比率法,但计算准确性容易受到噪声影响,且时效性差; 吴炜[6]提出一种基于路面视亮度差平方最优化的视频能见度检测算法,虽然该算法计算精度较高,但需对摄像机作标定,计算量大.
本研究提出一种数字图像与支持向量机(SVM)结合的能见度检测算法. 无需摄像头作标定或特殊标记物,通过暗通道先验原理等计算所拍摄图像的特征,结合人眼特性并通过支持向量机网络训练获取能见度模型,对能见度变化情况检测出能见度等级,为智能交通和辅助驾驶的智能限速奠定基础.
1 能见度检测算法概述
提出一种基于数字图像与SVM相结合的能见度检测方法,在能见度变化的情况下,可以通过数字摄像法检测出能见度等级. 基于人眼特性与图像特征分别建立了白天与夜晚两个能见度模型,能见度检测算法流程图如图1所示,根据采集环境的光照度值判断白天和夜晚. 当判断为白天时,则基于暗通道先验理论计算得到透射率,并对其导向滤波处理后计算韦伯对比度与图像边缘能量梯度,采用支持向量机模拟训练确定白天能见度模型; 当判断为夜晚时,先计算图像韦伯对比度,再计算对比度与明度的关系值(POLC值)、 边缘梯度值和图像功率特征值,采用支持向量机模拟训练确定夜晚能见度模型,综合白天与夜晚的能见度模型,确定能见度分类值. 其中白天的能见度模型是基于计算机视觉雾天模型.

图1 能见度检测算法流程图Fig.1 Flow chart of visibility detection algorithm
2 计算机视觉雾天模型
对于摄像头采集到的数字图像,其光学模型主要由景物目标发射光线与大气光照两部分构成[7-8]. 在计算机图像处理中,常采用的数字成雾模型[9-10]为:
I(x)=J(x)t(x)+A(1-t(x))
(1)
其中:I(x)是待去雾图像的光强;J(x)是要恢复的无雾的图像的光强;A是全球大气光成分;t(x)为透射率. 下面针对透射率的计算作一阐述.
2.1 透射率的计算
暗通道是指该区域光强度的最小值,是个很小的数[11],通常趋于0 . 假设透射率t(x)在一个窗口内为常数,则对式(1)两边同时除以A(大气光值),并进行两次最小值运算,由暗通道先验理论可得到透射率:
(2)
上述推论中都是假设全球大气光A值是已知的,在实际计算时,可以借助暗通道图从有雾图像中获取该值. 从暗通道图中提取亮度大于0.1%的像素的I值,将其最大值作为全球大气光值.
为得到更精确的透射率,采用快速导向滤波对式(2)作进一步优化,其滤波模型[12]如下:
qi=akIi+bk(∀∈ωk)
(3)
其中:I是一个引导图,即将原图像的灰度图作为一个引导图;q为导向滤波输出;a、b为待定系数,其是滤波前与透射率图相关的一个函数核;ωk是局部窗口,窗口半径取50像素×50像素; 为保持输入图像p与输出图像q之间的最小化差,快速导向滤波的a、b系数采用如下函数核:
(4)
其中:μk是导向图I窗口中的图像均值;δ是相应的图像方差;ε是一个平滑度正则参数调控因子; |ω|是窗口中像素点总个数. 至此,则可精确计算出一副图像的透射率,计算效果如图2所示. 从图2中可看出透射率与图像场景中雾的浓度有很大的相关性,其影响了道路能见度的高低.

图2 透射率计算效果图Fig.2 Transmittance calculation
2.2 韦伯定律对比度
影响能见度的图像特征除了透射率以外,还需要结合其它图像特征值,如图像对比度、 边缘特征等.Jourlin和Pinoli等[3]提出对数对比度定义,该定义满足了韦伯定律的心理物理学上对比度定义的一致性,即在一幅图像中计算两个像素点的对比度. 本研究分别计算了行向和列向的对比度,即:
(5)
其中:Cx, x1为行向对应像素点x的对比度值;f(x)与f(x1)为对应像素点的灰度值;f(x1)为x像素点相邻位置的右边像素值;M为图像f最大灰度值; min取相邻像素最小值. 同理可以计算出列向对比度.
2.3 梯度特征(边缘特征)
梯度特征(边缘特征)也是常用的图像特征之一. 通过考察图像的每个像素点在某个领域内的灰度变化可以进行梯度值计算,利用边缘临近一阶或二阶方向导数变化规律,使用边缘检测算子计算出局部梯度值. 采用一阶导数边缘检测算子(3px× 3px的Sobel算子)[13], 其计算出来的局部梯度值是一矢量,因此需计算其绝对值作为梯度幅值.
(6)
其中:F(Gmean)作为图像的全局平均梯度值;M与N表示图像大小;Gs(i,j)为对应像素(i,j)位置的Sobel梯度值. 能见度对图像边缘有着较大影响, 能见度高时,数字图像的边缘响应很强烈; 反之则很弱. 当然边缘响应的强弱与能见度的直接关系还需要结合其它特征向量并通过相应的机器学习才可以建立起模型.
3 夜间能见度模型
由于夜间缺少太阳光的照射,显然暗通道先验在夜间是不满足的,透射率不适用于夜间图像的特征值. 夜间能见度的高低除了雾霾以外主要受道路灯光影响,因此对夜间特征量提取还需要考虑到路灯对数字图像的亮度影响. 可以采用对比度与明度的关系(POLC)值、 梯度值、 图像功率谱等特征量作为模型的输入.
3.1 POLC计算
计算POLC值时,采用满足韦伯定律的对数对比度,明度采用Lab色彩模式[13]中的L通道作为图像明度. 因夜间路灯有着不同的颜色,在Lab颜色空间中明度和颜色是分开的,而设备一般获得的是RGB图像,因此需要将其转换到Lab空间. 在转换前还需要先将RGB转换到XYZ空间,转换公式如下:

(7)
进一步再将XYZ转换到Lab空间上:
L*=116×f(Y/Yn)-16
(8)
其中, f函数为:
(9)
其中: Yn是参考点, 其取值为100.0. 通过以上公式就可以获得Lab的L通道值.POLC值计算公式如下式所示,先将图像分成50像素×50像素的区域,然后计算出每一个区域的韦伯对比度C(y)和明度值L(y),接着将每个区域取均值再作商运算.
(10)
其中: 窗口大小Ω(x)为50; M×N是窗口总数. 对比度与明度商值作为能见度相关的特征量,当夜晚有雾时会将路灯的光散射在空气中,实际上是增大了L值,同时降低了对比度C值.
3.2 功率特征量
对图像进行二维傅立叶变换得到频谱图,即图像梯度分布图. 傅里叶变换后的图像频谱图由每个亮度不一的点组成,频谱图的点越亮表明该点对应的空间域上的点梯度值越大. 离散傅里叶变换DFT实现了信号在频域表示的离散化,使频域也能够用计算机进行处理,傅里叶变换的频谱图也称为功率图. 当能见度高时,场景轮廓都比较清晰,因此在频谱图中反应出来的就是比较亮的点数量多. 当大雾出现时候,对应频域内频率值比较低,即暗的点数多了. 因此将计算图像傅里叶变换的幅值作为一个功率特征量,作为支持向量机网络学习的一个输入特征量.
4 能见度检测模型
提取不同图像特征后通过支持向量机训练建立能见度检测模型.Vapnik提出来的支持向量机(SVM)可用于模式分类和非线性分类. 基于统计学习理论,建立一个分类超平面作为决策曲面,使正例和反例之间的隔离边缘被最大化. 选择合适的输入层可以提高能见度分类识别的准确率. 白天与夜晚的能见度输入变量如表1和表2所示.

表1 白天能见度检测变量Tab.1 Variables of visibility detection in daytime
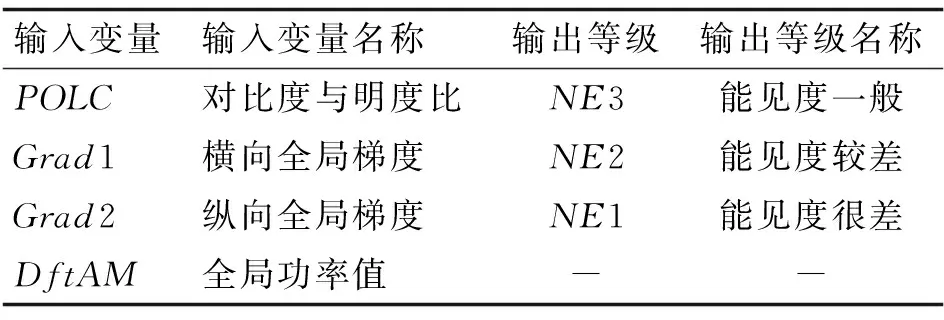
表2 夜晚能见度检测变量Tab.2 Variables of visibility detection in night
为加快训练速度,需对训练集和测试集数据进行归一化处理,将数据归一化到[0, 1]之间. SVM通过引入核函数K(xi,xj)可以较好地解决线性不可分问题,采用径向基核(RBF)为:
(11)
其中: xi是函数中心; γ是核函数宽度,其限制了函数的径向作用范围[14].
采用网格搜索法选取分类器的较佳参数,并通过交叉验证 (CV)来验证分类器性能. 本研究采用K-CV方法,该方法是将数据集分成k个子集,每个子集均做一次测试集,其余的作为训练集,交叉验证重复k次,并将k次的平均交叉验证识别率作为结果.
5 实验结果
为分析该能见度检测算法的可行性,建立了不同能见度测试数据集,其中白天能见度测试集包含了306幅图片,夜间测试集包含了205幅图片. 部分测试图库如图3所示.

图3 能见度训练图像库Fig.3 Imagelibrary of visibility training
通过实验数据分析得出,在白天能见度输入特征向量中,透射率可以作为能见度检测的先决条件,较好反映出雾的浓厚程度,再结合其它的特征量可以进一步构成支持向量机的训练网络. 白天能见度模型使用176组数据进行网络训练,夜间模型使用105组数据进行训练,分别训练得到最优参数,参数选择结果和训练预测结果如图4所示.


图4 实验结果图Fig.4 Diagrams of the experimental results
图4(a)和图4(c)是网格法参数寻优的结果图,x轴表示惩罚参数的选择,y轴表示核参数的选择,z轴表示取相应惩罚参数和核参数对应的K-CV准确率; 图4(b)和图(d)是测试集分类结果. 对于白天能见度模型使用了130组数据对训练好的网络进行预测分析,实验准确率为93.84%. 对于夜晚模型使用了100组数据进行预测,实验准确率为89%,准确率高于平局梯度法和透射率比率法[5]. 实验结果精度满足了人眼能见度检测的要求. 同时算法运算性能为: 在硬件平台IntelCorei3-2310M@2.10GHz双核CPU,6GB内存,处理一幅640px× 480px大小图像,白天能见度算法耗时353.82ms,夜晚能见度耗时190.89ms,在实际中能见度通常变化缓慢,因此间隔若干帧计算一次可以降低计算量.
6 结语
提出一种基于数字图像处理与支持向量机相结合的方法来对道路场景能见度进行分类检测. 针对白天和黑夜的不同场景,提取不同特征量并训练出不同的能见度模型,可有效对白天和黑夜的能见度等级进行分类. 在道路安全中,就可以根据能见度的分类值对道路进行智能限速,对来往车辆进行预警提示,可以提高道路安全出行. 本算法成本低、 处理速度快,可用于实时监测雾天情况下的道路能见度,在智能交通控制和辅助驾驶系统中具有重要的参考意义.
[1] 赵丽. 道路交通气象环境能见度检测器检测方法研究[J]. 交通标准化, 2014, 42(6): 1-4; 8.
[2] 郭豪, 邱琪, 马娜, 等. 不同能见度下激光测距仪最大测程的数值算法[J]. 红外与激光工程, 2013, 42(12): 3330-3334.
[3]HAUTIEREN,LABAYARDER,AUBERTD.Real-timedisparitycontrastcombinationforonboardestimationofthevisibilitydistance[J].IEEETransactionsonIntelligentTransportationSystems, 2006, 7(2): 201-212.
[4] 陈钊正, 周庆逵, 陈启美. 基于小波变换的视频能见度检测算法研究与实现[J]. 仪器仪表学报, 2010, 31(1): 92-98.
[5] 项文书. 基于交通视频的能见度估计研究[D]. 上海: 上海交通大学, 2014.
[6] 吴炜, 李勃, 杨娴, 等. 基于路面视亮度差平方最优化的视频能见度检测算法[J]. 电子与信息学报, 2014, 36(10): 2412-2418.
[7]CHENXQ,YANXP,CHUXM.Visibilityestimatedinfoggyroadtrafficbasedonatmosphericscatteringmodel[C]//ComputationalIntelligenceandNaturalComputingProceedings(CINC).Wuhan: [s.n.], 2010: 325-328.
[8]TANRT.Visibilityinbadweatherfromasingleimage[C]//IEEEConferenceonComputerVisionandPatternRecognition.Alaska:[s,n.], 2008: 287-294.
[9]NARASIMHANSG,NAYARSK.Visionandtheatmosphere[J].InternationalJournalofComputerVision, 2002, 48(3): 233-254.
[10]NARASIMHANSG,NAYARSK.Chromaticframeworkforvisioninbadweather[C]//IEEEConferenceonComputerVisionandPatternRecognition.HiltonHeadIsland:[s.n.], 2000: 598-605.
[11]HEKM,SUNJ,TANGXO.Singleimagehazeremovalusingdarkchannelprior[C]//IEEEConferenceonComputerVisionandPatternRecognition.Florida:[s.n.], 2009: 162-174.
[12]HEK,SUNJ,TANGX.Guidedimagefiltering[J].IEEETransPatternAnalMachIntell, 2013, 35(6): 1397-1409.
[13]NIXONMS,AGUADOAS. 计算机视觉特征提取与图像处理[M]. 杨高波, 译. 3版. 北京: 电子工业出版社, 2014.
[14] 奉国和.SVM分类核函数及参数选择比较[J]. 计算机工程与应用, 2011, 47(3): 123-128.
