磁罗经自差校正准确性评估软件设计
2018-03-08马海瑞王亦平
马海瑞,龙 飞,王亦平
(1.海军大连舰艇学院 航海系,辽宁 大连 116018; 2.海军大连舰艇学院 作战软件与仿真研究所,辽宁 大连 116018; 3.海军902工厂,上海 200083)
0 引言
现代舰船上磁罗经作为陀螺罗经的后备系统,仍是必备的航海仪器。磁罗经依靠地磁力的水平分量来指示舰船航向,配合方位圈还可测量物标方位和舷角,具有构造简单、生命力强、维护保养简便、不使用电源等优点[1]。舰船上的磁罗经受到地磁力、船体硬铁磁力和软铁磁力的共同作用,使罗盘北向偏离磁北而产生自差。自差的消除、剩余自差的测定及其计算制表过程准确与否直接影响磁罗经航向和方位修正的准确性。且通过传统方法在坐标纸上手工描绘的自差曲线极易发生不平滑,导致曲线失去了自差变化的周期性,直接影响自差表的精度。磁罗经自差校正准确性评估软件可避免人工填制自差记录与计算表耗时、易出错等问题,可自动计算自差系数、绘制自差曲线和生成自差表,提高工作效率和自差表的准确性,并可用于自差消测训练效果评估和考核成绩评定。
1 理论依据
1.1 自差公式
磁罗经自差是磁航向MC的连续周期性函数,可用Fourier级数[2]展开为:
δ=A+BsinMC+CcosMC+Dsin2MC+
Ecos2MC+Fsin3MC+…
(1)
舰船正平时,磁罗经在任意航向上的自差δ是δA、δB、δC、δD、δE等5项自差叠加的结果,此时可忽略自差与航向关系式中的高阶量,取前5项近似,即:
δ=A+BsinMC+CcosMC+Dsin2MC+Ecos2MC
(2)
式中,A、B、C、D、E为自差系数。
由自差原理知,半圆自差B、C和象限自差D分别由舰船纵向硬铁力、横向硬铁力和对称软铁力引起,其最大自差角分别出现在东西磁航向、南北磁航向和隅点磁航向上[2]。磁罗经自差经过消除之后剩余自差不大,罗经航向CC与磁航向MC接近,自差公式中的磁航向可用罗航向代替,得到:
δ=A+BsinCC+CcosCC+Dsin2CC+Ecos2CC
(3)
若5个自差系数已知,根据公式可以求出磁罗经在任意给定航向上的自差。需要指出,若自差未经消除,自差系数很大时,用公式或计算自差误差较大,所以这两个公式都是在自差消除之后适用的,称为剩余自差公式。
1.2 爱利法概意
目前,消除半圆自差和象限自差通常采用英国天文学家爱利(GeorgeBiddellAiry,1801~1892)提出的爱利法,通过消除各自差的最大自差角来抵消各自差力[3],一般先在主点磁航向(0°、90°、180°和270°)上利用硬磁棒消除半圆自差B、C,而后在隅点(45°、135°、225°和315°)中选取2个互相垂直的磁航向,采用软铁片(或软铁球)消除象限自差D。
以B自差为例,该项自差是由舰船纵向的硬铁力引起的,其最大值出现在东、西磁航向上,所以消除B自差应在磁东(90°)和磁西(270°)两个航向进行。由自差公式,磁航向为90°、270°时的自差分别为:
δE=A+B-E
(4)
δW=A-B-E
(5)
消除B自差后,应有:
δE=δW=A-E
(6)
可见,使东、西磁航向上的自差相等时,即东、西磁航向的剩余自差均为A-E时,B自差即被消除。一般地,先操纵就舰船航行在磁航向90°(或270°),测出自差,用纵磁铁将自差消除到零。舰船转到磁航向270°(或90°),再测出自差,仍用纵磁铁,使自差减小一半。这时,纵向的硬铁力即被纵磁铁抵消,B自差已被消除。
C、D自差的消除思想与B自差类同。经过消除过程以后,B、C、D自差大为减小,但难以完全消除,且非对称软铁力引起的A、E自差未予处理,这些构成了罗经的剩余自差。为了制定平时使用的自差表,需要测出各主点、隅点磁航向上共8个剩余自差,进而制定每隔10°航向的自差表。自差表通常采用曲线法求得,把8个剩余自差标在航向——自差坐标图中并连接成一条平滑曲线,再从曲线上量取每隔10°航向的自差值,形成航海工作中使用的自差表。
2 软件设计方案
软件在LabVIEW图形化编程环境中开发。软件界面根据功能划分为测定自差输入、消测结果评估、自差曲线绘制和剩余自差表预览生成等区域,如图1所示。测定自差输入区用于输入在4个主点和4个隅点磁航向上测得的8个剩余自差;消测结果评估区显示A~E自差系数拟合结果,并显示按考评标准评定自差消测准确性量化成绩,60以上的得分标签以绿色背景显示,否则以红色背景显示;自差曲线绘制区根据剩余自差拟合值(间隔1°磁航向)绘制剩余自差曲线,并可选择是否叠加显示8个原始数据点,通过拖曳游标可查询任意航向上的剩余自差;剩余自差表预览生成区用于输入舰船及罗经基本信息和预览剩余自差表(间隔10°磁航向),通过点击“生成”按钮即可将上述信息生成Word文档,打印后即为航行中直接可用的剩余自差表。
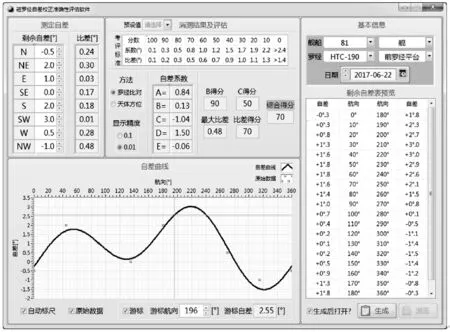
图1 软件主界面
3 软件实现
3.1 自差消测准确性评估模块
按照某训练与考核大纲中的航海人员技术操作标准,可按表1评定磁罗经自差消测准确性的成绩。

表1 磁罗经自差消测准确性评定标准
采用航向(陀螺罗经等)比对法消测磁罗经自差时,评估模块将表1中分数、系数和比差分别形成数组,并用实际评分点进行阈值插值的方式查询数组得到该项得分。其中,比差取测定自差与计算自差之间差数的最大值[4]。将系数B、C和比差3项的得分求取平均值作为自差消测准确性的最终成绩。LabVIEW程序代码如图2所示。
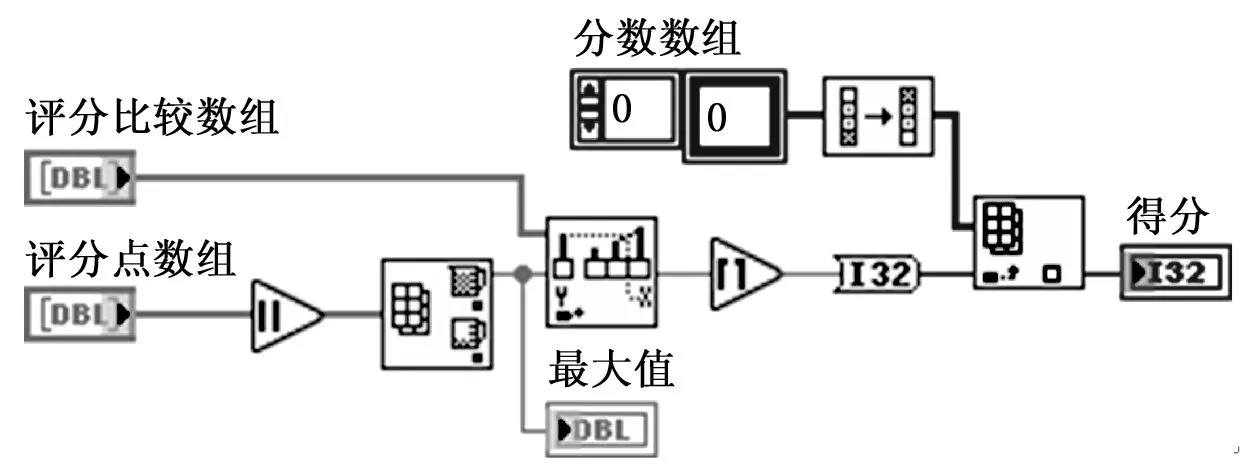
图2 自差测定成绩评定子程序代码
根据标准要求,采用天体(太阳等)方位法消测磁罗经自差时,程序自动将表1所列系数和比差标准放宽0.2°,成绩评定方法相同。可根据实际情况在软件界面中选择“罗经比对”或“天体方位”。
3.2 自差系数解算模块
自差测定过程中获取的8个剩余自差用于计算5个未知自差系数是有冗余的,但可在很大程度上减少观测的偶然误差,故采用广义最小二乘线性拟合方法,查找能最佳拟合输入数据的多维线性曲线值和对应的线性拟合系数集[5]。设拟合模型Dev是x的函数,即f0(x),f1(x),…,fn-1(x)[6],则:
a0f0(x)+a1f1(x)+…+an-1fn-1(x)
(7)
式中,a={a0,a1,a2,...,an-1}。
将自差公式应用于公式,作为自差系数广义最小二乘估计的模型函数:
Dev=a0+a1sin(x)+a2cos(x)+a3sin(2x)+a4cos(2x)
(8)

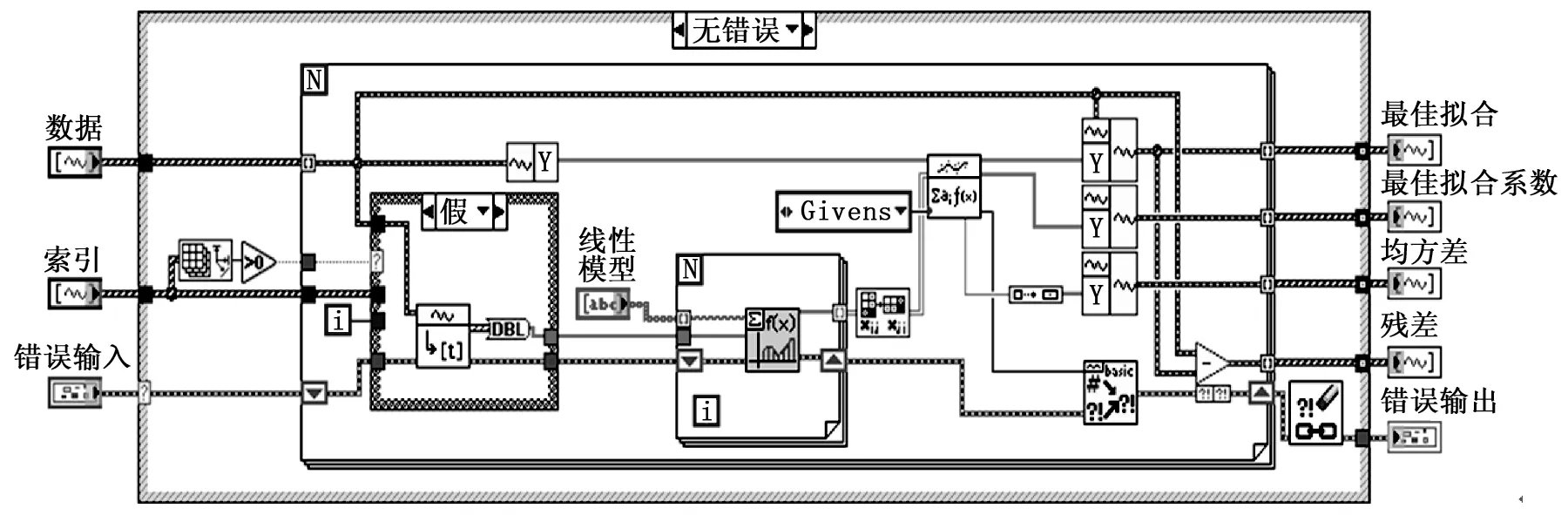
图3 自差系数最佳拟合程序代码
3.3 自差曲线绘制模块
将自差系数代入自差公式即可求取任意给定航向的剩余自差,进而绘制自差曲线。为保证曲线的平滑度,自差曲线绘制模块将拟合得到的自差系数代入自差公式计算每间隔1°航向的剩余自差值,并从0°起始取出其中每间隔10°航向的剩余自差值填入预览区。8个剩余自差作为原始数据点可按需绘入曲线图供直观比较。自差曲线绘制主体程序如图4所示。
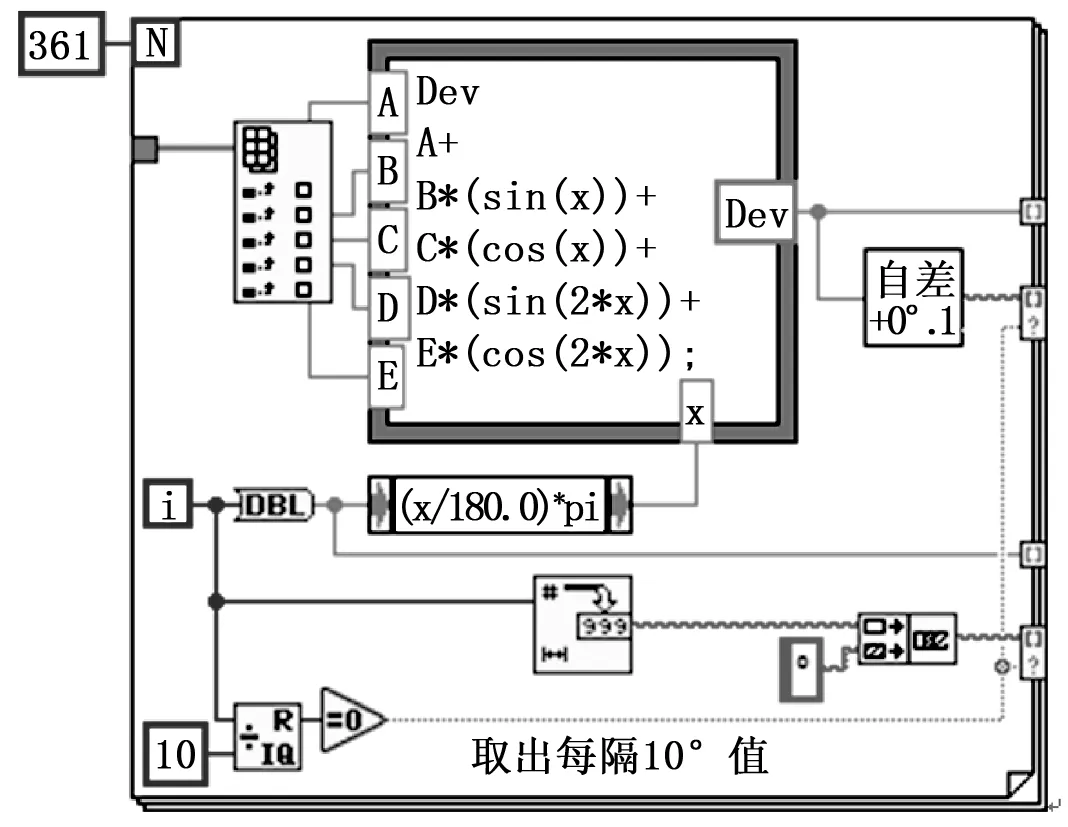
图4 自差曲线绘制主体程序代码
3.4 自差表生成模块
软件界面右部可随输入的剩余自差测定值实时提取间隔10°航向的自差值并提供预览功能。需要生成自差表时,只需点击预览区下方的“生成”按钮,程序调用Office报表生成函数,将预览区数据及舰船、罗经和消测日期等基本信息生成规定格式的自差表Word文档并存盘,打印后即可供后续航行中查取自差。自差表生成程序如图5所示。生成的Word自差表中含有剩余自差曲线,该曲线图由“导出图像”调用节点将“自差曲线”波形图控件导出至剪贴板并写入Word报表实现。
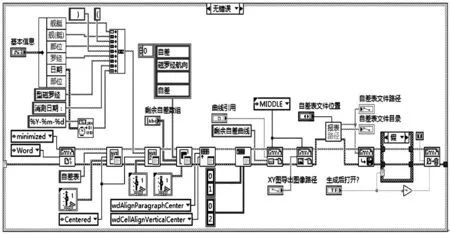
图5 自差表生成程序代码
4 实验及结果分析
某舰5组人员分别对5台磁罗经的自差进行校正后测定的
剩余自差情况见表2。
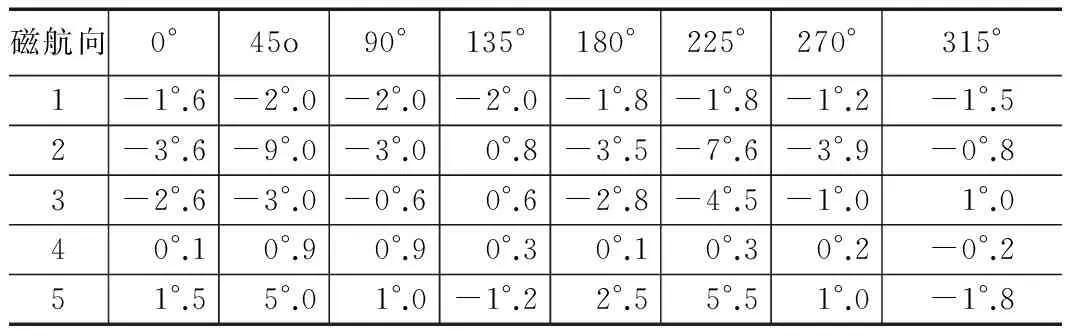
表2 磁罗经剩余自差测定值
为验证评估软件的性能,分别采用人工和评估软件两种方式计算自差系数和比差,并评估自差校正成绩,结果见表3。
以4号磁罗经的自差系数数据为例,将人工计算所得每隔10°磁航向的自差描绘成自差曲线如图6所示,评估软件生成的自差曲线如图7所示。
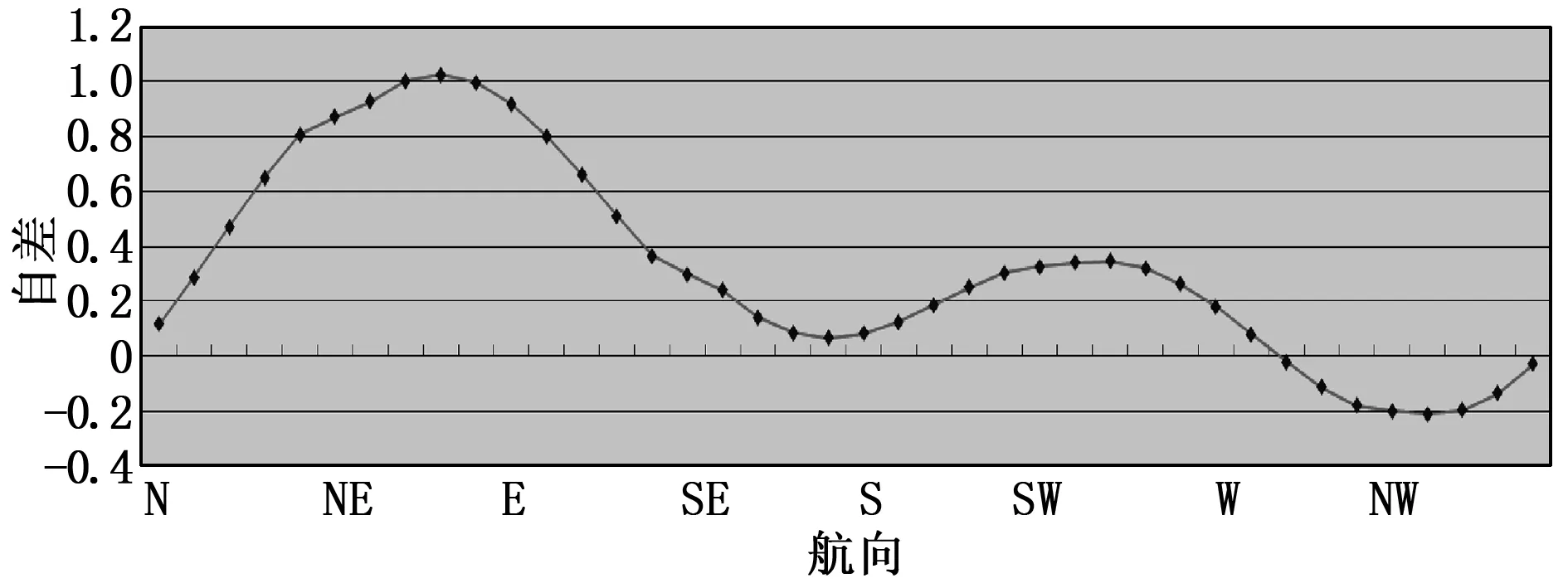
图6 人工计算并绘制的自差曲线
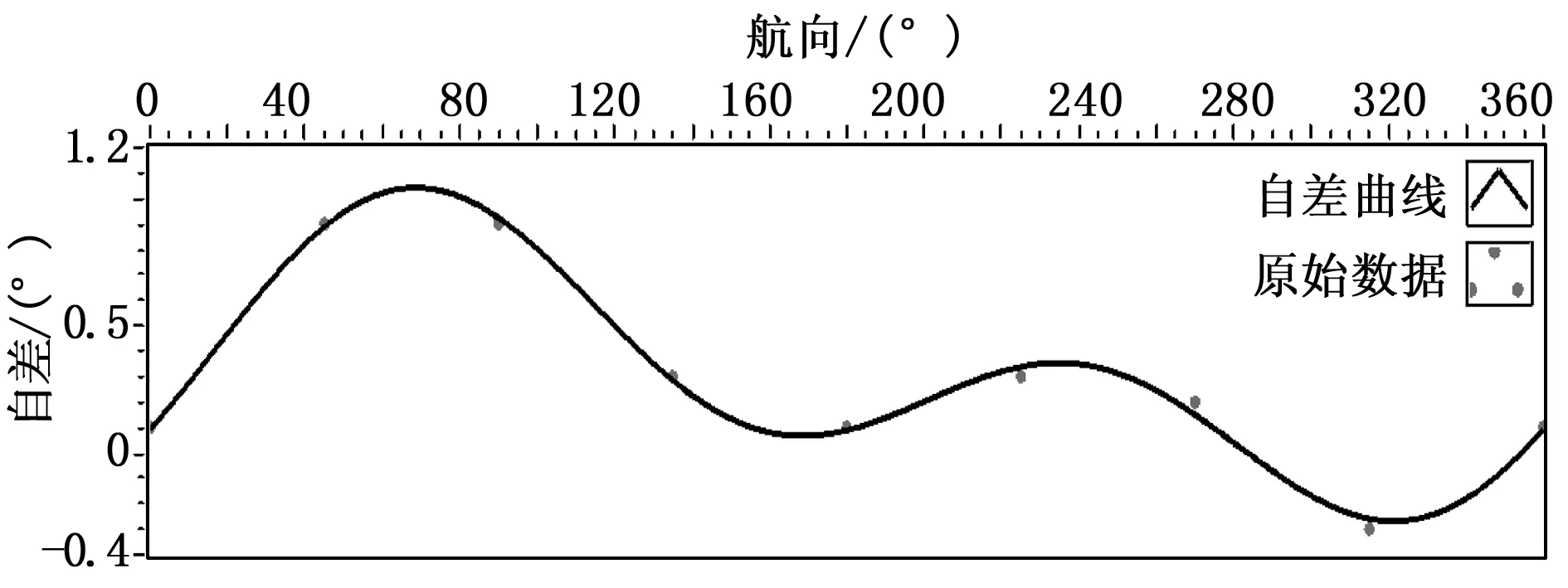
图7 评估软件生成的自差曲线
从图6可以看出,NE(45°)和SE(135°)磁航向附近的若干数据点明显不平滑,即此处的计算自差失去了按正余弦三角函数变化的规律性。而图7中曲线由于充分利用8个测定自差值计算5个自差系数的冗余度,摒弃了因自差测定不准确而产生的偏离点,生成了符合自差变化规律的平滑曲线。
从表3可以看出,4号磁罗经的C自差系数绝对值及比差值明显小于其他组别,评估软件根据相应系数和比差评估的成绩为93.0分,较客观地对该组人员的自差校正水平进行了量化评定。
在被抽样的5组共20名计算者中,人工填算自差表所需时间因熟练程度不同而有较大差异,耗时8~23分钟不等,平均耗时13.5分钟。而使用评估软件填算时,从输入测定自差到生成自差表一般可在30秒左右完成,时效提高了至少16倍。

表3 自差系数计算结果比较及自差校正成绩评定
5 结语
保证舰船磁罗经工作精度的关键在于及时准确地校正其自差。除每年至少一次的例行消测外,在新装罗经或罗经移位、舰艇受到剧烈震动后、舰艇大中小修后、临时消磁后、航行纬度变化10°以上等多种时机均需进行自差消测工作。磁罗经自差校正准确性评估软件简便高效,已应用于航海相关专业的课程教学及出海实习训练,明显提升了相应科目教学的科学性和有效性,对于提高上述专业学员的任职能力具有很强的实用性。同时,该软件可在航海人员及相关专业训练考核中评定磁罗经自差消除与测定的成绩,为“消测磁罗经自差”等项目的训练考核提供辅助和参考。
[1]王秀森,钟云海.电航仪器(下)[D].大连:海军大连舰艇学院,2015:1-3.
[2]陆文兴.航海仪器[M].大连:大连海事大学出版社,2005.
[3]季本山.磁罗经自差的数-字化校正法[J].航海技术,2009(6):32-33.
[4]杨 洋,舒 敏,韩 璐,等.测量船磁罗经自差校正技术研究[J].船海工程,2015,44(1):131-133.
[5]席庆彪,袁冬莉,牟 夏,等.基于最小二乘的无人机无线导航方法研究[J].计算机测量与控制,2011,19(3):679-681.
[6]庄建红,陈 鑫.基于LabVIEW的最小二乘法校正在控制中的应用[J].沈阳师范大学学报(自然科学版),2014,32(2):178-180.
[7]周坤芳,由文立,周湘蓉.建设磁罗经综合实验室提高磁罗经自差消测能力[J].实验室研究与探索,2006,25(9):1059-1060.
