车载LiDAR点云路灯提取方法
2018-03-06李永强董亚涵张西童李鹏鹏
李永强,董亚涵,张西童,李鹏鹏
河南理工大学测绘与国土信息工程学院,河南 焦作 454003
路灯作为最常见的公共设施类型之一,是高精度城市道路地图构建和智慧城市管理的重要对象。要实现路灯的有效管理,需要获得每个路灯详细的信息,包括位置、型号、高度、朝向等,并且随着时间的推移,路灯的更换、增添等信息都会发生变化,而这些信息的获取都需要耗费大量的人力进行统计和测绘。车载LiDAR(light detection and ranging)作为当前测绘领域前沿技术之一,为更加精细的城市地理信息获取提供了技术支持[1-2],能在快速移动过程中获取道路两侧地物详尽的三维空间点云信息,对路灯信息的获取具有明显优势,路灯的各种空间特征都可以精确表达在三维点云中。
围绕车载LiDAR技术的路灯提取,相关的研究工作主要分为4类:
(1) 基于空间聚类的方法[3-7]。在滤除地面信息的前提下,对车载点云进行空间聚类,依据不同类型地物的空间特征,对地物进行分类与提取。该方法将地物分割为建筑物、树木、杆状地物、车辆等大类信息,但路灯与其他杆状地物的区分存在困难。
(2) 基于几何特征的方法[8-12]。该方法根据不同地物的空间几何特征,并根据语义信息及约束条件,实现杆状地物的分类提取。该方法能够将树木、路灯、指示牌等杆状地物分类提取出来,但针对每种路灯的具体型号,则不能进行有效识别,各路灯单元的具体参数信息获取能力有限。
(3) 基于超体元的方法[13-17]。该方法根据地物局部抽象特征,结合特征区域的空间上下文信息生成上下文可视词汇表,根据查询对象和分段语义对象之间上下文视觉单词包的相似性度量,检测出感兴趣的对象。该方法能够有效克服遮挡及数据不完整性等不利因素,检测出灯杆、交通路标、汽车等地物信息,但这对每种具体路灯型号的提取仍存在不足。
(4) 基于模板匹配的方法[18-21]。该方法根据感兴趣地物的空间特征,采用自动训练或建立先验样本的方法,在相应的几何特征约束和语义信息支持下,从三维场景中进行匹配,获得感兴趣的地物类型。基于模板的提取方法能够精细到各种类型的地物,包括路灯,但当前研究对车载LiDAR点云的完整性及路灯孤立程度要求较高,提取质量对点云及路灯所处环境依赖程度较大,需进一步改进和完善。此外,基于图割的提取方法则是通过欧氏距离聚类算法[22],并考虑了路灯灯杆的形状和点的强度信息来定义能量函数,用高斯混合模型从候选聚类中识别出路灯灯杆。该方法仍然不能实现路灯种类的识别及更详细路灯信息的获取。
当前从车载LiDAR点云中提取路灯的研究仍存在以下问题:①对路灯点云的完整性及路灯孤立程度要求较高,对正常条件下车载LiDAR系统获取道路场景点云数据,往往难以实现理想的路灯提取效果;②路灯的精细程度提取不够,对不同型号路灯的识别研究很少,而明确路灯型号才能满足精细化管理要求;③各种型号路灯的参数信息获取不足,这些参数对于路灯的动态变化检测、历史数据更新,以及照明分析都至关重要。基于以上问题,本文受样本分类思想启发[23],提出基于先验样本辅助的,骨架缓冲区判别的路灯点云提取与种类识别算法。
1 路灯模型
路灯结构相对简单,同一种类型路灯在结构、形态方面相同,在车载LiDAR点云中表现出很高的相似性。数据处理中,利用路灯的高度、伸展度、结构形态等细节特征,能够实现不同类型路灯的准确区分,而同种类型的路灯也能进行归类。另外,路灯虽然种类繁多,结构差异也很大,但一定区域范围内,路灯的种类有限,存在大量的重复性,只要建立有限数量的先验样本,通过一定的匹配规则,将待探测路灯与已知先验样本进行匹配筛选,即可确定路灯的类型,进而获得该路灯其他更详细的属性信息,从而实现路灯的精细化提取,并可根据已探测路灯的相关信息(种类、空间布局、位置分布等),预判下一个同类路灯的可能位置。对候选路灯预分类时,可优先指定匹配类型,提高匹配的效率,完成识别后,对路灯的种类再度确认,以提高提取的准确度。基于上述思想,构建统一的路灯模型,并对不同类型路灯进行个性化处理,是实现路灯精细化提取的关键。
1.1 路灯点云特征
路灯作为典型的杆状地物,分布在道路边缘或道路中间隔离带上,在车载LiDAR点云中,路灯表现出以下主要特征:
(1) 表面包含密集点云数据。车载LiDAR系统以极快的速度获取道路两侧地物密集点云,凡是车载LiDAR系统视野内的路灯,都包含数百至数千个三维点,这些点密集分布在路灯的表面,能清楚表达路灯的局部细节特征。
(2) 点云覆盖具有非完整性。受车载LiDAR系统自身激光器工作模式、外业数据获取方式、其他地物遮挡等因素的影响,所获取的点云对路灯表面覆盖具有非完整性,一般情况下,表面覆盖率为60%~95%。
(3) 主体特征表达明显。车载LiDAR系统都采用高度耦合的POS系统,为传感器实时提供高精度位置和姿态信息,解算后的点云数据有较高的绝对位置精度,在局部范围内,其相对精度更高,路灯的主体特征如直立的灯杆、灯头形态等都能够明显表达出来。
1.2 路灯几何参数分解
结构上,路灯分为灯头和灯杆两部分。灯杆为相对单一的柱状(圆柱、棱柱、双柱等),位于路灯的下部并与地面相连。灯头有一定的结构特征,安装在灯杆顶部,或者附属在灯杆上部。为统一路灯模型,将下部单一的柱状部分定义为灯杆,附属有照明结构的非杆状部分为灯头。一般情况下,路灯的伸展度(路灯水平投影外包矩形的长边)不超过路灯高度的1/2。
要区分灯杆和灯头部分,关键是要找到两者的界点,界点以下为结构单一的柱状灯杆,以上则为结构相对复杂的灯头部分。对于每个候选路灯点云数据,沿灯杆高度1/2处向上以一定间距(0.2~0.5 m)向上搜索,对落在每段内的点云进行拟合,判断是否符合杆状地物的特征,若不符合且有一定的伸展度,且拟合后也不符合面状地物(广告牌等)的特征,则认为到达了界点,其上为灯头部分。
灯头是路灯结构的主体部分,也是路灯类型识别的主要参考依据。对灯头点云进行水平投影,求出最小外包矩形,该矩形的长边即为灯头的伸展度。对投影点云进一步拟合出直线段,该线段所在直线为路灯的方向线。以灯杆中心为界,将灯头两侧点云及对应线段分为两部分,端点距离灯杆远的一侧为路灯的正方向,该部分点云为路灯的前部分,距离近的一侧为路灯的后部分。若两个端点距离相等,则以高程来判断,高的一侧为前部分,低的一侧为后部分;若高程也相等,则指定任意一侧为前部分,另一侧为后部分。分出前后部分后,根据前后部分点云,分别求出前部分伸展度、前部分高、后部分伸展度、后部分高。多向路灯也符合上述规则,单向路灯只有前部分,没有后部分。路灯投影面积也是路灯的重要参数,是对点云在水平小格网(例如0.1×0.1 m)内投影,统计存在投影点的格网面积总和。
1.3 路灯骨架线抽取与缓冲区构建
基于路灯在车载LiDAR点云中表达特点,单纯的点云匹配难以达到理想的效果,一维曲线骨架可以完整地表达物体的结构,具有数据简洁、拓扑结构明显等特性,是路灯匹配的重要参数。也可以在数据匹配后,根据依托骨架所构建的缓冲区,实现对各路灯点云的真实分割,且不受外界因素(树木等)的影响。采用具有抗噪声和干扰的L1骨架提取算法[24-25],并根据路灯点云数据的特点,在路灯骨架提取时,不使用局部稠密度权重,简化算法,以适用于路灯的骨架优化。流程如图1所示。
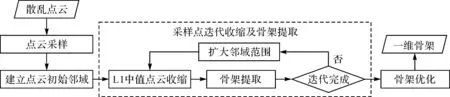
图1 L1中心骨架提取算法流程Fig.1 Flow chart of L1 central skeleton extraction algorithm
根据L1中值理论,中心骨架迭代收缩的核心思想是带规整项的局部L1中值,最优化公式可概括为
(1)
式中,Q={qj}jòJ⊂R3是输入点集,X={xi}iòI⊂R3开始是从Q随机下采样的点集,并且点数|I|≪|J|。最小化公式(1)后,X变成了规整的、处于输入模型中心的“骨架点集”。R(X)为规整项
(2)

(3)
基于提取的一维曲线中心骨架,需要构建以骨架为中心的缓冲区,目的是在匹配的过程中,对候选路灯点云进行筛选,以精化匹配的效果。基本方法为:以一定的距离间隔建立与骨架线垂直的横截面,将附近一定范围内的路灯点云投影至横截面上。如对于横截面P,P上的投影点为点集M,对点集M进行二维点聚类,保留距离骨架中心最近的一个聚类单元N(N≤M)作为该骨架的截面点;对点集N建立截面方向上的最小包围矩形,判断矩形的长宽比δ;若δ≥3,则以包围椭圆表示该截面,椭圆中心为骨架中心,椭圆的一条半轴平行于地面,椭圆参数根据最小包围矩形确定;若δ<3,则以包围圆表示该截面,圆的中心为骨架中心,以点集N中距离骨架中心最远点到骨架中心的距离为圆的半径;椭圆和圆均在截面P上,若椭圆的长半轴和圆的半径小于5 cm,则以半径为5 cm的圆表示该处的截面(5 cm为根据路灯实际构造尺寸和移动系统的测量精度确定)。
1.4 路灯模型构建
基于路灯几何参数和骨架线,构建路灯模型,主要包含以下几个部分:
(1) 点云数据:是路灯模型的数据基础,由落在路灯表面的一系列激光点组成。先验样本中的点云数据在构建样本前直接赋值,选择数据质量好、表面覆盖率高的路灯点云作为样本数据。非样本数据则是通过相关路灯探测算法自动获得,每个路灯都拥有独自的点云数据。
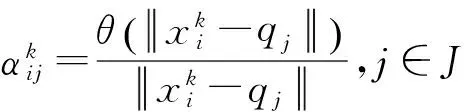
(2) 几何参数:是在路灯模型语义的基础上,由点云数据自动生成。路灯几何模型分为两部分:灯杆和灯头(图2(a))。灯杆为竖直状杆状地物,是初始阶段判断杆状地物的主要参考;灯头为路灯的主要结构部分,是区别路灯型号的主要依据。投影面积是区别路灯与树木等地物的重要参数。
(3) 结构参数:是在几何模型的支持下,由点云数据自动计算生成,包括路灯位置PB、路灯高度Ph、灯杆高度Hh-bottom、灯头高Hh、灯头伸展度Hr、前部分伸展度Hr-front、前部分高Hh-front、后部分伸展度Hr-back、后部分高Hh-back、路灯方向向量m(图2)、灯头结构线和缓冲区参数(图3)。
图2 路灯先验样本结构参数Fig.2 Streetlight sample extraction
(4) 属性信息:包括路灯的型号、ID号、归属信息等。路灯型号由候选路灯数据与先验样本匹配后赋值,ID号在路灯型号匹配定型后由系统自动累积生成,归属信息等则是在完成区域内路灯匹配,根据街道等信息批处理指定。
(5) 建模方法:是模型生成及相关操作的各种算法,包括路灯点云自动生成、几何参数自动生成、路灯属性自动生成、路灯自动提取与识别等。
(6) 实体模型:与路灯型号相关联,是路灯在各种场景中表达的对应模型,可以为二维模型、三维模型、动态模型等。
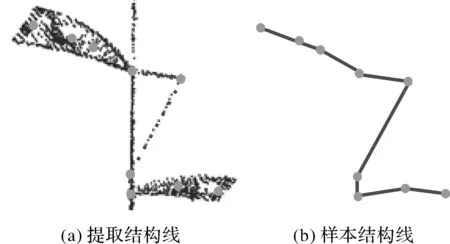
图3 路灯结构线Fig.3 Streetlight sample structure line
2 路灯提取
在路灯模型和样本集的支持下,从车载LiDAR点云中实现路灯的提取。原理如下:依据数学形态学的理论和方法,提取出车载LiDAR点云中的杆状地物,在路灯模型和语义规则的约束下,获得候选路灯;根据候选路灯的参数信息,以及已获取路灯的统计信息,从样本集中筛选出候选样本;基于最小二乘理论的匹配算法,对候选路灯和候选样本进行匹配;建立路灯样本缓冲区,对候选路灯进行判别分析,实现路灯提取和种类识别,并把识别信息添加入已有路灯信息。图4为算法流程。
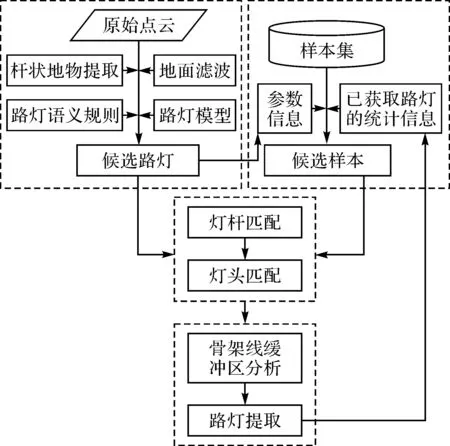
图4 算法流程Fig.4 Algorithm flow chart
2.1 候选路灯提取
2.1.1 地面滤波
地面滤波算法中,基于TIN的渐进加密的地面点滤波算法[26]及其改进算法[27]较为成熟,地面点提取完整性好,但进行高密度车载LiDAR点云滤波时,计算过程复杂耗时。本研究中,地面点提取的目的是根据路灯位置提供路灯底部高程信息,仅需要构建规则DEM,不需要完整的地面点,因此采用耗时较少的数学形态学滤波方法[28],并根据车载LiDAR点云数据特点,对算法进行改进,增加二次反向滤波,将误分为地面点的点云采用较大的格网间隔再次滤波,剔除由于地面空洞导致的错误地面点。滤波算法步骤如下:
(1) 构建格网。遍历LiDAR点云数据,探测数据在X和Y方向上的极值Xmax、Xmin、Ymax、Ymin,并以此构建边长为D的m×n格网,m、n计算方式如式(4)所示
(4)
式中,D根据点云密度选择[29],使格网内包含足够多的点。
(2) 离散点高程腐蚀。遍历所有格网,取任意一格网为操作格网,并以此为中心,开w×w个格网大小的窗口,比较窗口内各点的高程,取窗口内最小高程值为操作格网中点云腐蚀后的高程。
(3) 离散点高程膨胀。再次遍历所有格网,对经过腐蚀后的数据用同样大小的结构窗口进行膨胀,即以任意一网格为中心开w×w大小的窗口,此时,用腐蚀后的高程值代替原始高程值,比较窗口内各点的高程,取窗口内最大高程值为操作格网中点云膨胀后的高程。
(4) 地面点提取。例如一点p,设Zp是p点的原始高程,t为阈值,在每点膨胀操作结束时,对该点是否是地面点做出判断。如果p点膨胀后的高程值和其原始高程值Zp之差的绝对值小于或等于阈值t,则认为p点为地面点,否则为非地面点。
(5) 构建规则DEM。提取出来的地面点,使用时需要以数字高程信息表示,因此需要依据地面点构建规则DEM来表示地表高程;规则DEM以水平投影边长为length的正方形表示。将地面点云在XOY平面格网化,对于一个格网邻域范围内包含3个及以上点云的节点,通过去除极值后取平均值的方法计算出该节点的高程值;对于没有高程值的格网节点,使用反距离加权法以具有高程值的节点计算其高程值。
2.1.2 杆状地物提取
基于路灯灯杆为连续竖直杆状物的特点,将原始点云格网化,并通过数学形态学闭运算,以单列竖直n层格网为模板进行候选路灯杆位置的提取(图5(a))。如图5(b)为路灯点云,建立三维空间格网,标记包含点云的网格,图5(c)为格网化后的路灯。由于在数据采集过程中,路灯不可避免地被其他地物遮挡而导致灯杆的不连续,因此先通过膨胀算法使部分因遮挡而数据缺失的灯杆上下部联结(图5(d)),再通过腐蚀算法去除竖直连续较短的地物格网,则可以保留路灯及与路灯高度相近地物的杆状部分格网(图5(e))。格网膨胀高度根据数据完整水平决定,腐蚀模板通常采用高差为2/3倍Ph的模板进行腐蚀。完成上述操作后,以保留格网的水平几何中心为候选路灯的水平位置。

图5 路灯位置提取Fig.5 Location extraction of streetlight
2.1.3 候选路灯获取
提取出杆状地物后,依据路灯模型,获取疑似路灯的结构信息和参数信息,灯高与伸展度的比例约束、路灯的投影面积约束,将路灯与其他大多数非路灯对象滤除。考虑到遮挡等因素,聚类获取的杆状地物可能存在数据不连续性,提取出候选路灯位置后,在水平方向上,以候选路灯位置为中心,1.2倍Hr(灯头伸展度)为半径,选取该范围内的点作为候选路灯及周围点云。同样以候选路灯位置为中心,0.2 m为半径,选取该范围内的点作为候选路灯灯杆点云。
2.2 样本候选
2.2.1 样本集构建方法
对类型多样的路灯构建样本集,可拓展样本的通用性,提高路灯提取的效率和准确性。基于路灯样本模型及其参数信息,从4个层次构建样本集(图6):1层以高度为主要依据,以3 m为间隔划分单元,将路灯归类到不同区间中;2层以伸展度为主要依据,以0.8 m为划分单元,将路灯归类到不同区间中;3层以灯头数量为主要依据,划分为单向、双向、多向路灯;4层具体到每种型号的路灯。
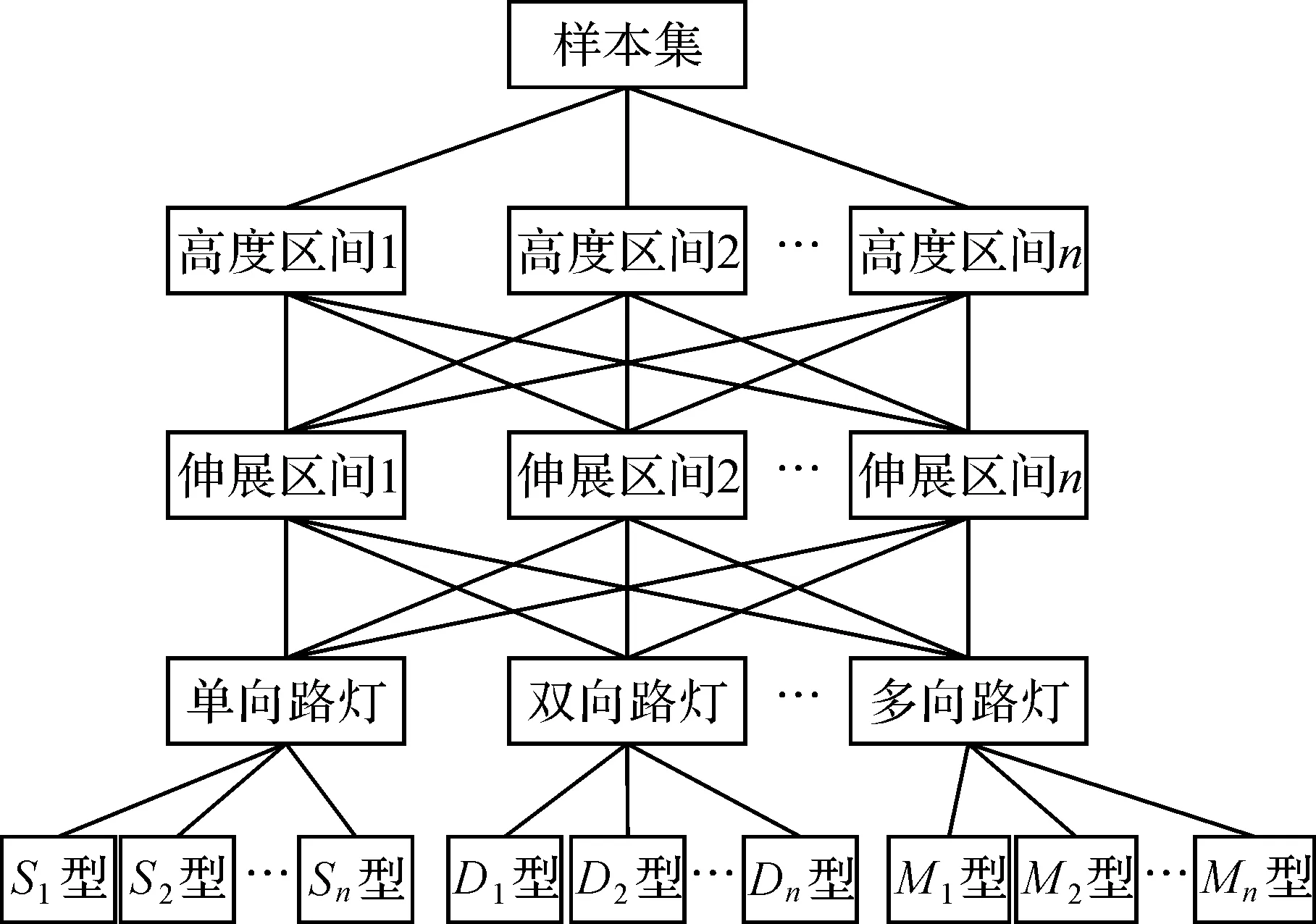
图6 样本集构建Fig.6 Diagrammatic sketch of sample set building
2.2.2 样本候选方法
样本候选采用已提取路灯类型优先的原则,用一维数组存储已经提取的路灯型号信息,包括类型、数量及位置等信息,按照最近一次出现的时间,在一维数组中对候选路灯型号排序,出现越晚位置越靠前。由于路灯的大量重复性,当前候选路灯与前一路灯相同的概率很大,依据上面的原则,能大幅度提高效率及准确性。当已提取信息为空,或者匹配后不能满足要求时,则依据路灯模型,提取候选路灯相关参数,按自顶向下的原则从样本集中选择候选样本:先按候选路灯的高度进行划分,判断落在哪个高度区间,将该区间内的路灯样本作为筛选对象,若高度同时接近两个区间(±0.5 m),则将两个高度区间的样本都作为筛选对象。再根据水平投影伸展度选择伸展度区间,将该区间内的路灯样本作为筛选对象,若伸展度同时接近两个区间(±0.2 m),则将两个区间内的路灯样本作为筛选对象。接下来选择灯头朝向,根据候选路灯的前后部分投影和水平投影来确定,若只有前部分投影,则为单向路灯,若有前后部分投影,且水平投影的长、宽比<1.5,则说明长宽比例相近,可判断为多向路灯,若水平投影的长、宽比≥1.5,则判断为双向路灯。最后对底层的若干路灯样本,依次进行匹配操作,选择最合适的类型,作为当前候选路灯的类型归属。若没有找到合适的匹配类型,则从底层逐步向上,与其他区间内样本进行匹配,直至遍历样本集中所有样本。
若样本集中没有找到合适的样本,则启动新增样本模式:将当前候选路灯作为一个新的路灯类型,按照样本集构造方法找到归属的层,其类型属于待定,并作为新的样本,参与后面的类型识别。待路灯提取操作完成后,则在人工干预下,完善新增样本信息,对并该类路灯进行重新确认。
2.3 样本匹配
对所提取出的候选路灯点云,依据所构建的路灯模型,自动求取结构参数信息,与样本集中的样本点云进行匹配。若候选路灯点云与样本集中的某一型号路灯匹配,则判断为该种型号的路灯。若不能找到匹配的样本点云,则存在两种可能:一是样本集中不存在该种型号的路灯;二是该地物为非路灯,将该候选路灯作为待处理对象。
2.3.1 杆部匹配
将样本路灯与候选路灯进行匹配,包括灯杆底部高程和灯杆方向匹配两个步骤。由于灯杆并非绝对垂直于地面,因此对提取的候选路灯杆点云采用最小二乘法拟合空间直线,选取拟合直线与地面DEM交点作为候选路灯灯杆的底部点,通过平移,将路灯样本灯杆底部点平移至与候选路灯灯杆底部点重合,如图7(a)。然后将路灯样本绕灯杆底部点旋转,使得样本路灯灯杆与候选路灯灯杆重合,如图7(b),即实现了路灯灯杆的匹配。
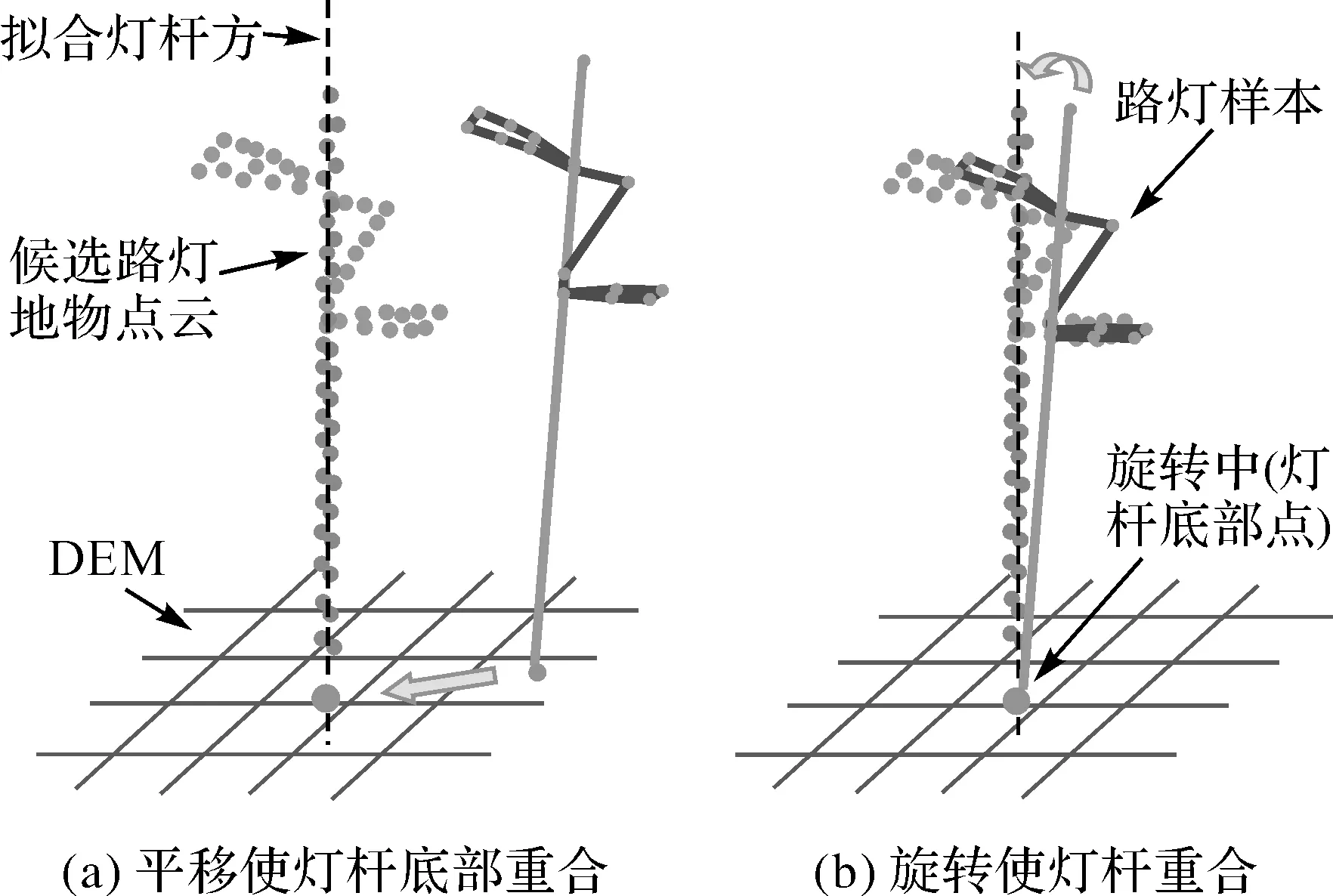
图7 灯杆匹配Fig.7 Light post matching
2.3.2 灯头匹配
依据灯杆匹配结果和路灯参数Hh-bottom(灯杆高)与Hh(灯头高),截取候选路灯点云中灯头高度范围内的点作为候选路灯头点云。在垂直于灯杆方向上,为实现路灯样本绕路灯杆旋转后与候选路灯灯头方向最佳匹配,引入最小二乘的思想:以灯杆向上方向为z轴正方向,将候选灯头部分点云投影至xOy平面(图8),点O为灯杆水平中心,m为样本的灯头方向,计算出旋转角ε并进行样本旋转即可实现灯头匹配。
如图9中一点P,路灯样本方向m到点P的夹角为α,点P到路灯杆轴水平距离R,路灯样本方向m到P的弧长为L,L具有方向性。有
L=αR
(5)
旋转后的弧长
L′=(α+ε)R
(6)
则样本旋转后所有点的弧长平方和G(ε)为

(7)
求ε的值使旋转后弧长平方和G(ε)的值最小,则可求得使样本与候选点云重合所需要的角度[30]。对ε求导得一阶导函数F(ε)为

(8)
由F(ε)可知G(ε)存在极小值,且F(ε)=0时,G(ε)为最小值,令F(ε)=0得求得
(9)
由于该算法提取出来的方向不能判断路灯正反向,因此需要根据1.4节中的路灯前后部分不同参数进行正反向判断,若为正向则旋转角为ε,反之则为ε+π。路灯样本在水平方向上,绕路灯灯杆轴旋转ε(或ε+π),即可实现与候选路灯灯头点云方向的重合。
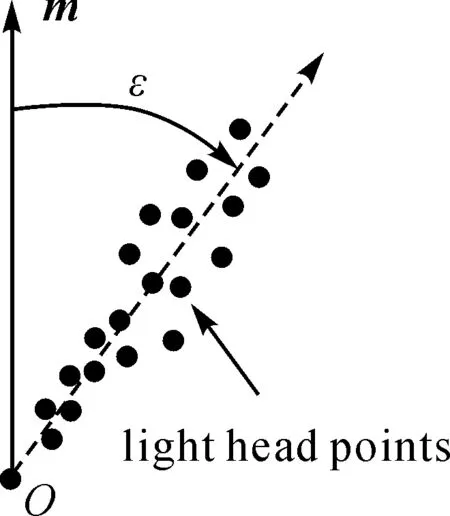
图8 拟合灯头方向Fig.8 Schematic of streetlight direction
图9 角度与弧长Fig.9 Schematic of angle and arc
2.4 识别提取
2.4.1 缓冲区判断策略
判断候选路灯是否与样本路灯一致,依据灯头结构信息进行判断。若候选路灯与样本路灯一致,则在样本灯头结构线附近包含大量对应点云,这些点均匀地分布在结构线附近,在样本没有结构线的地方,不包含点或包含少量噪声点。依据此原则,对灯头样本结构线分别建立以R1和R2为半径的缓冲区,两个缓冲区命名为LS和N-LS,如图10所示,LS不包含于N-LS;构建的缓冲区如图11(a)所示。若满足:①在LS内沿结构线方向上均匀地分布着路灯点云;②在N-LS内,较少存在路灯点云,则判断为路灯,如图11(b)所示。算法操作时,将缓冲区划分为较小的区段,统计包含点云缓冲区的体积、不包含点云缓冲区的体积与总体体积之间的比值,作为上述两个准则的判断依据:
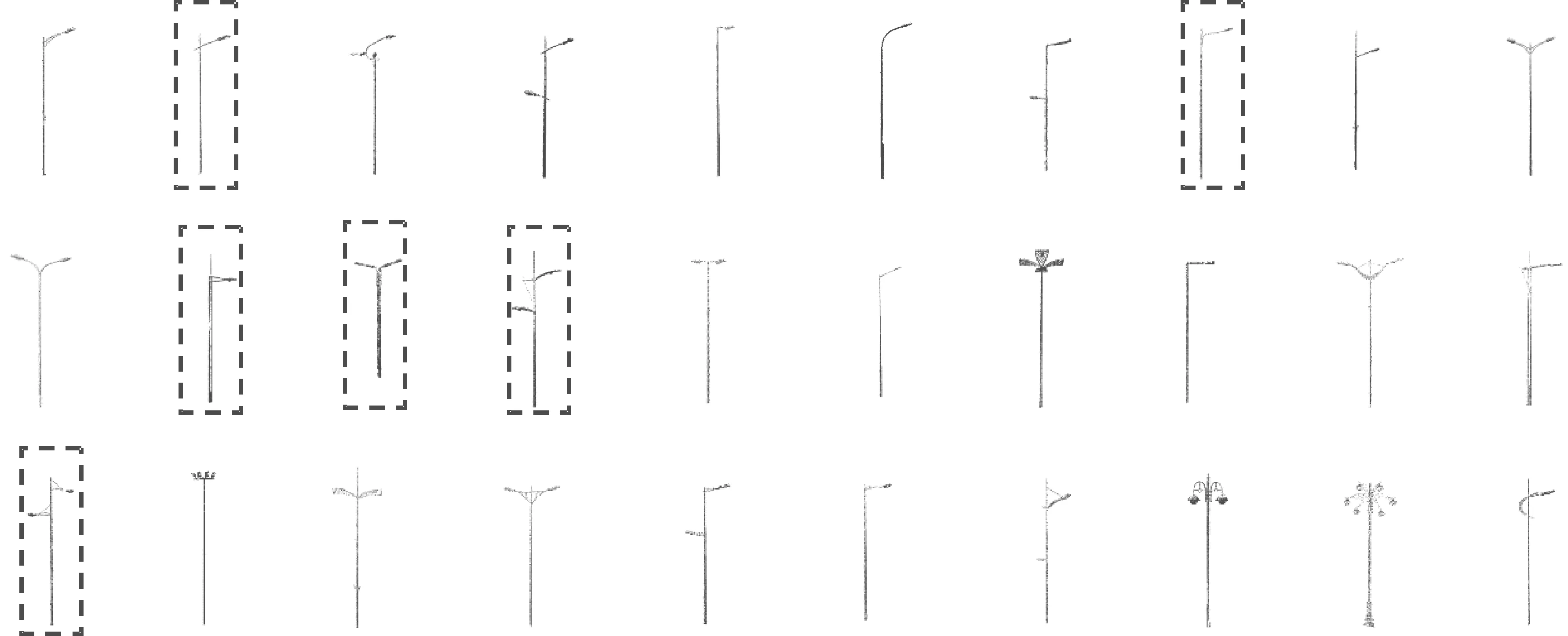
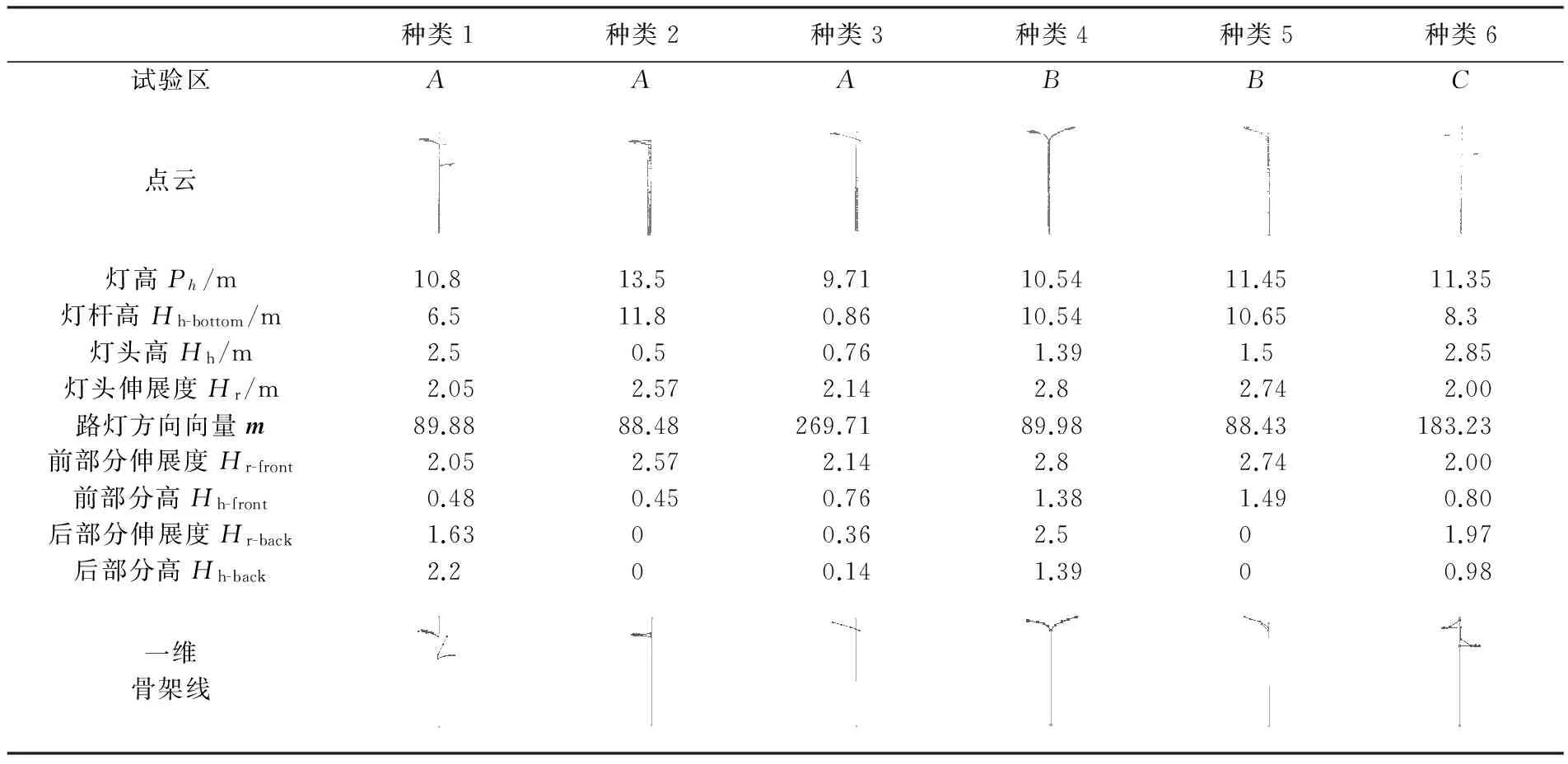
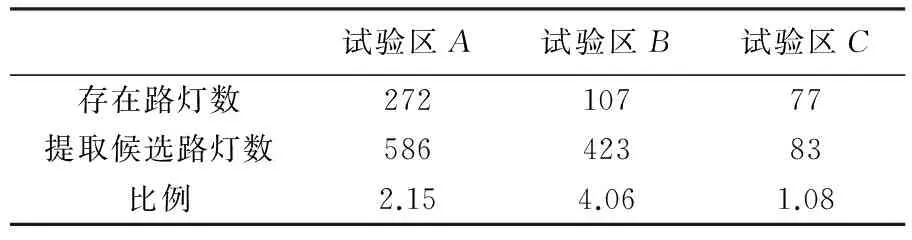
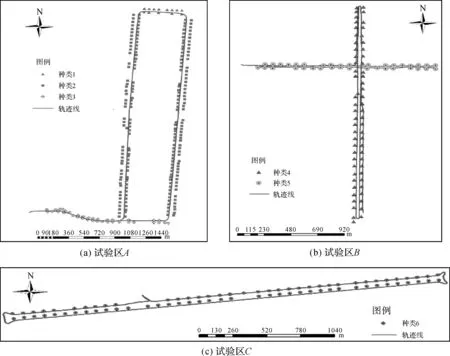
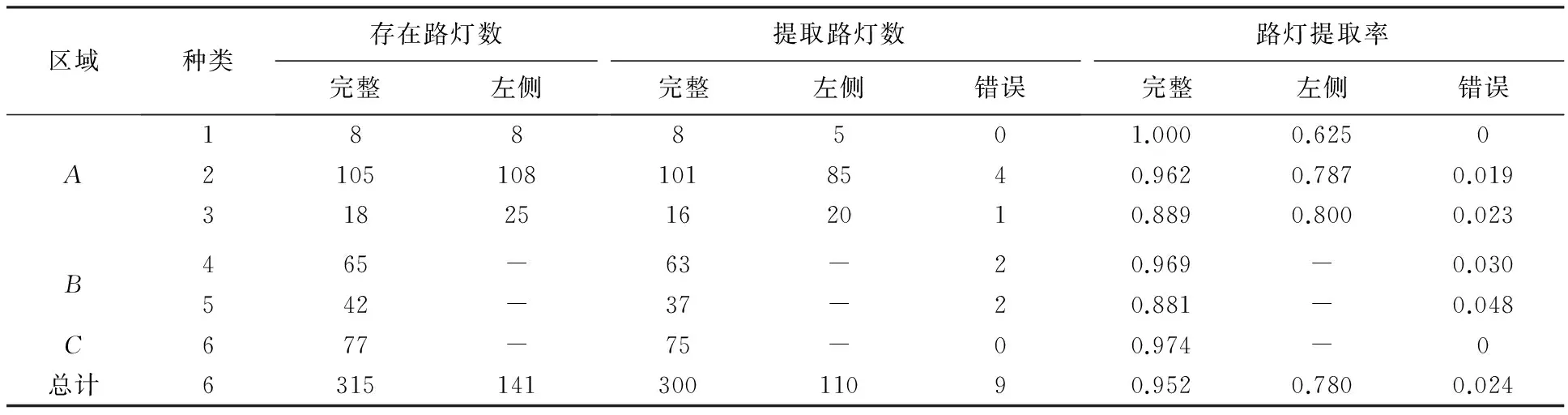
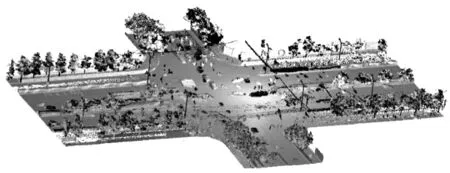
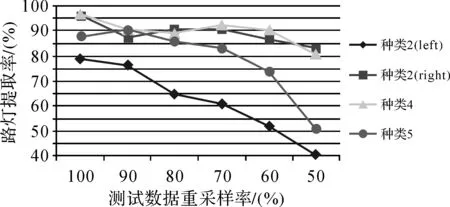
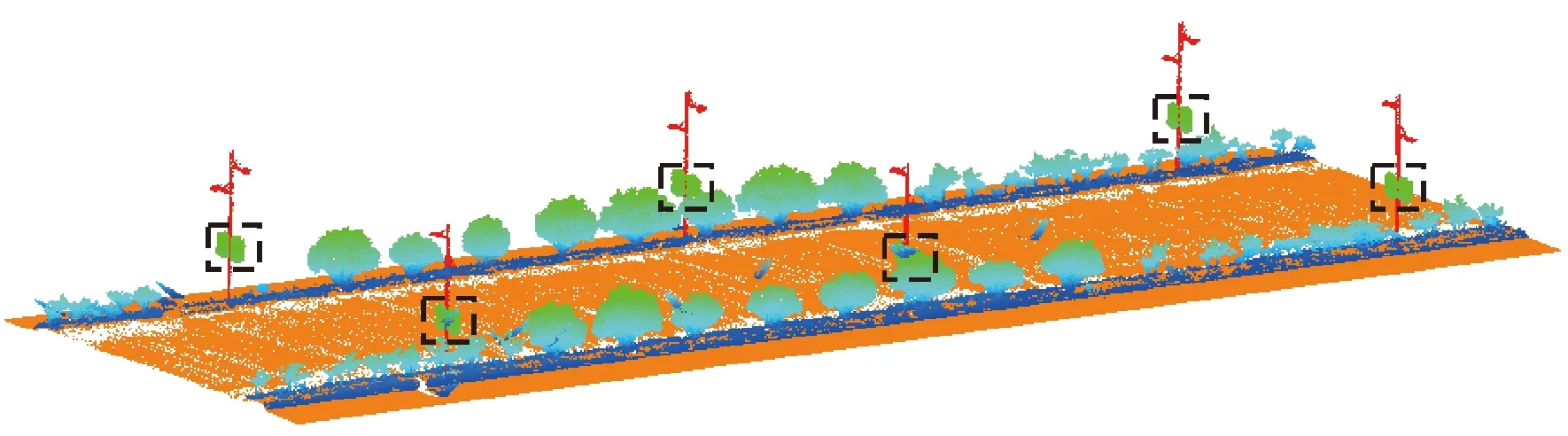
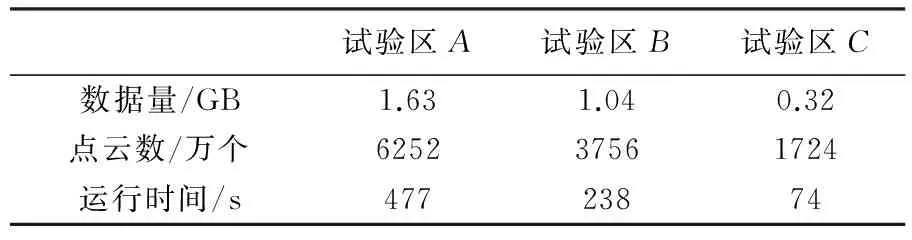
(1) 在LS内沿结构线方向上均匀地分布着路灯点云,即在LS内VLS点/VLS总 (2) 在N-LS内,较少地存在路灯点云,即在LS内VNLS点/VNLS总≤T2为路灯,VNLS点/VNLS总>T2为非路灯,其中VNLS点为N-LS内含有点的缓冲区体积,VNLS总为N-LS总的体积,T2用于判断点云是否在LS内沿结构线方向上均匀分布的判断阈值。 若候选路灯被判断为与样本路灯一致,则提取LS和N-LS范围内的点云作为路灯点云。 图10 缓冲区创建Fig.10 Schematic of buffer creating 图11 创建缓冲区和路灯判断Fig.11 Created buffer and streetlight judgment 2.4.2 参数确定依据 进行缓冲区判断时,涉及4个参数,建立LS和N-LS缓冲区的R1和R2,以及用于路灯判别的阈值T1和T2,其中R1和R2根据骨架线的变化而变化。R1与R2根据缓冲区参数确定,在某一段骨架线上R1设置要略大于该骨架线提取的缓冲区参数,通常R1选取为1.2倍缓冲区参数,R2设置为1.5~2.5倍R1。T1根据数据采集质量确定,当数据质量好,路灯结构基本完整时,将T1设置为较高的值,反之则需要降低T1值。T2根据路灯周边环境确定,若路灯穿插在行道树等地物中,则T2需要设置为较大的值,反之则可以设置为较小值。试验中,T1的值为0.7,T2的值为0.25。 选取3个试验区的数据进行试验,3个试验区中包含了不同种类、不同存在状况和不同数据质量的路灯。使用本文算法进行运算,并对试验结果进行了分析。 试验数据概况如表1所示。试验区A包含3种类型的路灯,测量车采用单侧车道一次测量,道路中间为有行道树的绿化带,道路右侧的数据质量优于道路左侧,可验证数据完整性对算法的影响。试验区B包含两种类型的路灯,分别为孤立的路灯和与行道树穿插在一起的路灯。试验区C包含一种路灯,为带有广告牌的路灯,可验证路灯灯杆上附属物对提取算法的影响。图12中(a)、(b)和(c)分别为试验区A、B和C的原始点云图像。 表1 试验数据概况 图12 试验区域原始数据Fig.12 Raw data of test areas 先依据测量GNSS轨迹线,保留道路两侧一定范围内的数据点,将距离较远的数据点去除,这样不但减少了数据量,保留了必要的路灯点云数据,而且能去除建筑物等地物的影响。然后对保留数据进行处理,包括样本构建和候选路灯提取。图13为路灯样本集中的部分样本点云,方框圈选的路灯为与本研究相关的6个路灯点云,根据路灯模型,对应的几何模型和结构参数如表2所示。其中路灯结构线由一组或多组连续线段表示,线段由两端点的节点表示。提取路灯的结构参数后,根据路灯结构参数中灯杆高进行候选路灯位置的提取,表3中为测区中实际存在的路灯和提取出来的候选路灯数量。在试验区B中,由于存在较多与路灯高度近似的杆状地物,因此提取的候选路灯数量相对试验区A中较多。实现候选路灯位置提取后,根据样本参数中的路灯范围进行候选路灯及其周边点云的提取。然后根据样本参数进行灯杆匹配和灯头匹配,并根据灯头的前后尺寸差异进行正确的灯头方向判别。最后根据样本结构线建立缓冲区,进行路灯的判断和路灯点云的提取。 图13 路灯样本集(部分)Fig.13 Streetlight sample sets(part) 种类1种类2种类3种类4种类5种类6试验区AAABBC点云灯高Ph/m10.813.59.7110.5411.4511.35灯杆高Hh-bottom/m6.511.80.8610.5410.658.3灯头高Hh/m2.50.50.761.391.52.85灯头伸展度Hr/m2.052.572.142.82.742.00路灯方向向量m89.8888.48269.7189.9888.43183.23前部分伸展度Hr-front2.052.572.142.82.742.00前部分高Hh-front0.480.450.761.381.490.80后部分伸展度Hr-back1.6300.362.501.97后部分高Hh-back2.200.141.3900.98一维骨架线 表3 提取的候选路灯数量 图14为试验区提取出来的路灯位置示意图,图中包括6种路灯的位置和GNSS轨迹。3个试验区路灯提取结果统计如表4所示。 图14 提取路灯的位置图Fig.14 Locations of extracted streetlights 区域种类存在路灯数提取路灯数路灯提取率完整左侧完整左侧错误完整左侧错误A1888501.0000.625021051081018540.9620.7870.01931825162010.8890.8000.023B465-63-20.969-0.030542-37-20.881-0.048C677-75-00.974-0总计631514130011090.9520.7800.024 注:种类4为孤立路灯,种类5为与行道树穿插的路灯。 表4中包括3个测试区内实际存在的路灯数量,本文算法提取的路灯数量,以及误将其他地物提取路灯的数量,并计算各项值比例。 下面对路灯提取结果进行定性定量分析: (1) 提取准确率。试验区A中,数据完整的路灯为131个,提取出125个,提取率为95.4%;道路左侧数据质量较差的路灯为141个,提取出110个,提取率为78.0%。试验区B中孤立的路灯为65个,提取出63个,提取率96.9%;与行道树交叉的路灯为42个,提取出37个,提取率为88.1%。试验区域C中路灯为77个,提取出75个,提取率97.4%。3个试验区中,数据完整路灯共315个,总提取数为300个,总的提取率为95.2%,错误提取9个,错误率2.4%。分布在道路另一侧数据质量较差的路灯提取率为78%。 (2) 种类识别。当试验区中存在多个类型路灯时,本文算法成功地实现了路灯的种类识别,如图15中为试验区B中种类4和种类5路灯的交叉区域,依据本文算法成功地将这两种路灯进行了区分。 图15 路灯分类结果Fig.15 Results of streetlight classification (3) 路灯存在状态。路灯的存在状态主要指其与周边环境中的其他地物之间的关系。以试验区B为例,种类4的路灯安装在绿化带中,周边仅有低矮的灌木丛,因此其为孤立的路灯,灯杆和灯头没有和其他地物的相交关系。而种类5的路灯安装在种植有行道树的路边沿,因此路灯灯杆较多地与行道树穿插在一起,为与行道树交叉的路灯。试验过程中,由于行道树树冠的影响,种类5的灯杆部分点云部分缺失,因此在提取候选路灯位置时,需要选取较大的值进行膨胀运算,以使灯杆链接为一个整体。由提取结果数据可知,与行道树穿插在一起的路灯仍可以达到88.1%的提取率。需要注意的是,种类5中,虽然路灯与行道树有交叉部分,但行道树树冠并没有淹没路灯灯头部位,所以灯头方向提取算法可以准确的进行,若灯头部分和行道树树冠点云交叉严重,则难以取得较好的提取效果。 (4) 数据质量对提取效果的影响。试验区A中,测量车采用单侧车道一次测量,且道路中间是有行道树的绿化带,因此道路右侧的数据质量优于道路左侧,数据的这种特点验证了数据的完整性对本文算法的影响。从提取结果中可以看出,对数据完整的点云可以达到95.4%的提取率,对不太完整的路灯点云也能达到78.0%的提取率。为进一步验证点云密度对本文算法的影响,本文采用对原始点云进行重采样,改变试验区的点云密度,并再次对试验区使用本文算法进行路灯提取,对种类2和4、5进行统计,图16为重采样后提取的路灯的对比,试验区A和试验区B的原始点云密度分别为0.022 m和0.035 m(路灯灯杆上最近点的平均距离)。从试验结果可以得出,对于孤立的种类2右侧和种类4的路灯,点云密度的降低并没有对提取结果造成太大的影响,而对于种类2左侧受遮挡的路灯和种类5与行道树交叉的路灯,降低点云的密度,将使得算法较难正确分辨路灯的形状,从而降低了算法的提取准确性。 图16 数据质量对提取效果的影响Fig.16 Impact of data qualify (5) 路灯附属物的影响。在试验区域C中,路灯上安装有广告牌,作为路灯的附属物,根据本文的路灯提取算法,在提取和判断路灯点云时,将不受其影响。如图17所示,橙色点为地面点,红色点为本文算法提取的路灯点,其他点为未分类点,路灯附属物被归为未分类的点云中。试验结果验证,本文路灯提取算法对路灯上的附属物有很好的抗干扰特性,在路灯点云提取时,不会受到路灯附属物的影响,在后期研究中,还可以根据该算法特性,进行路灯附属物点云提取研究。 图17 路灯附属物对路灯提取算法的影响Fig.17 Influence of streetlight appendage on streetlight extraction algorithm (6) 运算效率。文中算法实现采用VC++与OpenGL编程实现,采用普通笔记本电脑运行,电脑基本配置为:Intel Core i5-6200双核处理器、2 GB独立显卡、64位操作系统、8 GB内存。3个试验区运算基本情况如表5所示。 表5 试验区数据运算时间 从表5可以看出,本文算法有很高的运行效率,运算时间与数据量呈线性关系,完全能够满足实际工程建设的需要。 提出车载LiDAR点云中路灯自动提取与识别算法,通过构建准确的路灯样本模型,不但能准确提取出车载LiDAR场景中的路灯,而且能自动识别出路灯的型号,获得每个路灯准确的参数信息,实现了路灯的精确提取。该算法仅需点云的三维空间坐标,有较强的普适性。通过试验分析,本算法对于质量好的点云数据,可以达到较高的提取率,对于数据质量相对较差的数据,仍能达到乐观的提取结果。对于与行道树穿插在一起的路灯,同样具有较好的提取效果,弥补了先前研究中的不足。当路灯灯头部分点云大量缺失,或者路灯杆不为竖直杆状地物时,本文算法难以实现有效提取,需要在后续研究中不断完善。 [1] 卢秀山, 李清泉, 冯文灏, 等. 车载式城市信息采集与三维建模系统[J]. 武汉大学学报(工学版), 2003, 36(3): 76-80. LU Xiushan, LI Qingquan, FENG Wenhao, et al. Vehicle-borne Urban Information Acquisition and 3D Modeling System[J]. Engineering Journal of Wuhan University, 2003, 36(3): 76-80. [2] QIN Rongjun, GRUEN A. 3D Change Detection at Street Level Using Mobile Laser Scanning Point Clouds and Terrestrial Images[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 90: 23-35. [3] WANG Zhen, ZHANG Liqiang, FANG Tian, et al. A Multiscale and Hierarchical Feature Extraction Method for Terrestrial Laser Scanning Point Cloud Classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(5): 2409-2425. [4] 李永强, 杨莎莎, 李框宇, 等. 车载激光扫描数据中杆状地物提取[J]. 测绘科学, 2015, 40(8): 42-46. LI Yongqiang, YANG Shasha, LI Kuangyu, et al. Extraction of Rod-like Objects from Vehicle-borne LiDAR Data[J]. Science of Surveying and Mapping, 2015, 40(8): 42-46. [5] 谭贲, 钟若飞, 李芹. 车载激光扫描数据的地物分类方法[J]. 遥感学报, 2012, 16(1): 50-66. TAN Ben, ZHONG Ruofei, LI Qin. Objects Classification with Vehicle-borne Laser Scanning Data[J]. Journal of Remote Sensing, 2012, 16(1): 50-66. [7] YAN W Y, MORSY S, SHAKER A, et al. Automatic Extraction of Highway Light Poles and Towers from Mobile LiDAR Data[J]. Optics & Laser Technology, 2016, 77: 162-168. [8] 冯义从, 岑敏仪, 张同刚. 基于知识的车载LiDAR地物自动分类[J]. 计算机工程与应用, 2016, 52(5): 122-126. FENG Yicong, CEN Minyi, ZHANG Tonggang. Knowledge-based Automatic Objects Classification from Mobile LiDAR Data[J]. Computer Engineering and Applications, 2016, 52(5): 122-126. [9] LI Dan. Optimising Detection of Road Furniture (Pole-like Objects) in Mobile Laser Scanner Data[D]. Amsterdam: University of Twente, 2013. [10] YOKOYAMA H, DATE H, KANAI S, et al. Detection and Classification of Pole-like Objects from Mobile Laser Scanning Data of Urban Environments[J]. International Journal of CAD/CAM, 2013, 13(1): 1-10. [11] ZAI Dawei, CHEN Yiping, LI J, et al. Inventory of 3D Street Lighting Poles Using Mobile Laser Scanning Point Clouds[C]∥Proceedings of 2015 IEEE International Geoscience and Remote Sensing Symposium. Milan: IEEE, 2015: 573-576. [12] YANG Bisheng, DONG Zhen. A Shape-based Segmentation Method for Mobile Laser Scanning Point Clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 81: 19-30. [14] YANG Bisheng, DONG Zhen, ZHAO Gang, et al. Hierarchical Extraction of Urban Objects from Mobile Laser Scanning Data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 99: 45-57. [15] WU Fan, WEN Chenglu, GUO Yulan, et al. Rapid Localization and Extraction of Street Light Poles in Mobile LiDAR Point Clouds: A Supervoxel-based Approach[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2): 292-305. [16] YU Yongtao, LI J, GUAN Haiyan, et al. Bag of Contextual-Visual Words for Road Scene Object Detection from Mobile Laser Scanning Data[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(12): 3391-3406. [17] YANG Bisheng, DONG Zhen, ZHAO Gang, et al. Hierarchical Extraction of Urban Objects from Mobile Laser Scanning Data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 99: 45-57. [18] YU Tianshu, WANG Ruisheng. Scene Parsing Using Graph Matching on Street-view Data[J]. Computer Vision and Image Understanding, 2016, 145: 70-80. [19] YU Yongtao, LI J, GUAN Haiyan, et al. Semiautomated Extraction of Street Light Poles from Mobile LiDAR Point-clouds[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 53(3): 1374-1386. [20] YU Yongtao, LI J, GUAN Haiyan, et al. Three-dimensional Object Matching in Mobile Laser Scanning Point Clouds[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 12(3): 492-496. [21] YU Yongtao, LI J, GUAN Haiyan, et al. Automated Extraction of Urban Road Facilities Using Mobile Laser Scanning Data[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2167-2181. [22] ZHENG Han, WANG Ruisheng, XU Sheng. Recognizing Street Lighting Poles from Mobile LiDAR Data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(1): 407-420. [23] 孙飞, 徐世武, 张岩. 利用目标类样本的遥感分类策略[J]. 测绘科学, 2016, 41(2): 133-139. SUN Fei, XU Shiwu, ZHANG Yan. Classification Strategy for Remote Sensing Data Based on Positive Training Samples[J]. Science of Surveying and Mapping, 2016, 41(2): 133-139. [24] HUANG Hui, WU Shihao, COHEN-OR D, et al. L1-medial Skeleton of Point Cloud[J]. ACM Transactions on Graphics, 2013, 32(4): 65. [25] 伍世浩. 点云模型的L1-中心骨架[D]. 广州: 华南理工大学, 2014. WU Shihao. L1-medial Skeleton of Point Cloud[D]. Guang-zhou: South China University of Technology, 2014. [26] AXELSSON P. DEM Generation from Laser Scanner Data Using a Daptive TIN Models[J]. International Archives of Photogrammetry and Remote Sensing, 2000, 33(B4): 110-117. [27] 李卉, 李德仁, 黄先锋, 等. 一种渐进加密三角网LiDAR点云滤波的改进算法[J]. 测绘科学, 2009, 34(3): 39-40, 216. LI Hui, LI Deren, HUANG Xianfeng, et al. Advanced Adaptive TIN Filter for LiDAR Point Clouds Data[J]. Science of Surveying and Mapping, 2009, 34(3): 39-40, 216. [28] CHEN Qi, GONG Peng, BALDOCCHI D, et al. Filtering Airborne Laser Scanning Data with Morphological Methods[J]. Photogrammetric Engineering & Remote Sensing, 2007, 73(2): 175-185. [29] CAHALANE C, MCELHINNEY C P, LEWIS P, et al. MIMIC: An Innovative Methodology for Determining Mobile Laser Scanning System Point Density[J]. Remote Sensing, 2014, 6(9): 7857-7877. [30] Wikipedia. Linear Least Squares (Mathematics)[Z]. 2016:2016.
3 试验分析
3.1 数据概况

3.2 数据处理
3.3 提取结果
3.4 结果分析
4 结束语
