叶菜土下铲根收获机的研究开发
2018-03-06於锋马拯胞
於锋 马拯胞
0 引言
蔬菜作为人们日常生活中必不可少的食品,对人们的健康生活有着至关重要的作用。近年来,随着我省经济的发展和社会的进步,设施蔬菜在高效农业中比重越来越大,但是,蔬菜收获环节机械化进展缓慢。目前市面上的蔬菜收获机以进口为主,主要是叶菜、结球类蔬菜收获机,且多数是土上收获。国内多家单位已研发出蔬菜收获机,但大都是土上收获,跟江苏省内叶类蔬菜消费观念不太吻合。因此,需要开发一种叶菜收获机,解决叶菜土下铲根收获的问题,降低叶菜收获作业成本,减轻劳动强度,提高叶菜种植效益。
1 机具结构及主要技术指标
1.1 机具结构
叶菜土下铲根收获机结构包括机架部分、行走装置、发动机、变速箱、传动装置、铲菜装置、输送装置、升降装置、偏心装置、拨菜装置、分流装置与限深装置(见图1)。该机可一次完成振动铲菜、菜土分离、输送、分流、装筐五道作业工序,具有作业质量好、效率高、成本低等特点。
1.2 主要技术参数
配套动力:4.5 kW汽油机;
整机重量:345 kg;
外形尺寸(长×宽×高):2 885 mm×1 332 mm×891 mm;
振动铲频率:550次/min;
振动铲振幅:4 cm;
振动铲入土深度:2~4 cm;
机器前进速度:0.7~8 km/h;
工作幅宽:120 cm。
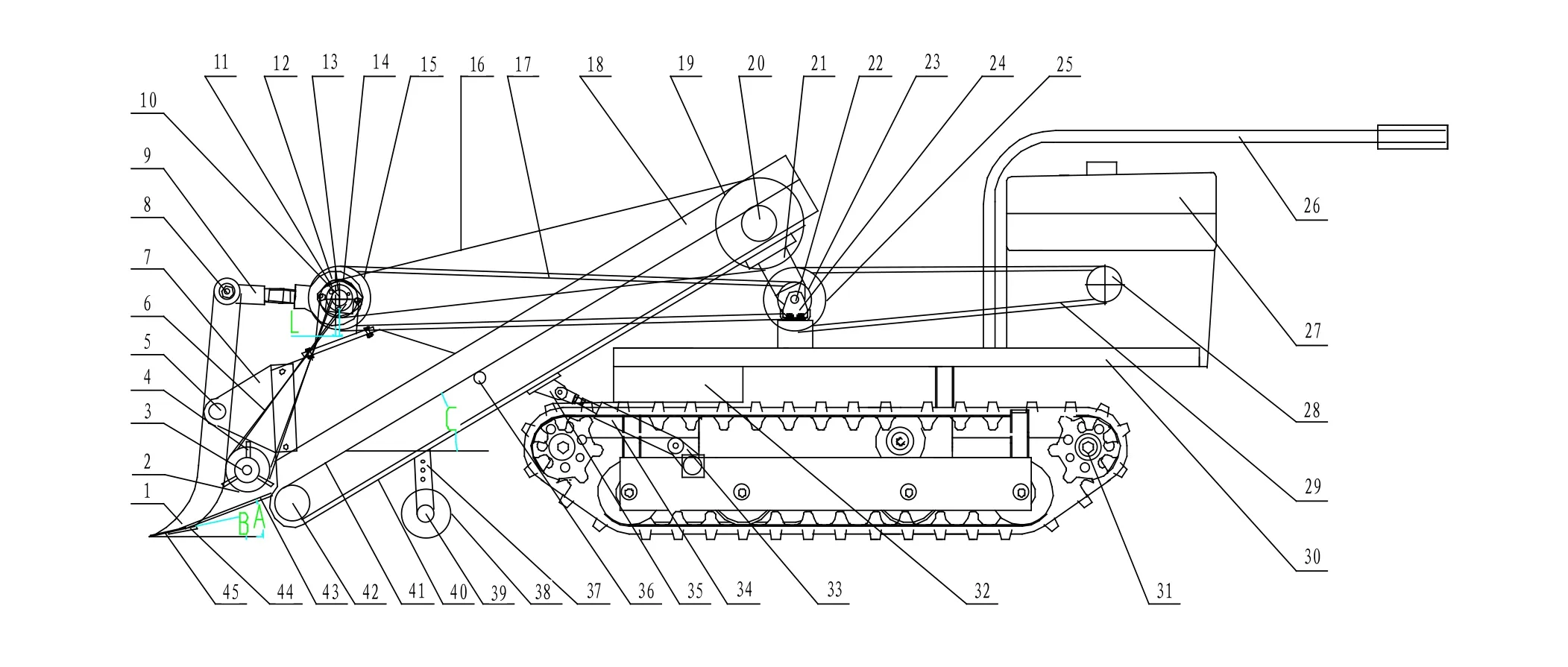
图 1 叶菜土下铲根收获机结构示意图
2 关键部位设计
2.1 主要传动装置设计
当发动机驱动变速箱、行走装置前进作业时,皮带轮一通过主传动皮带驱动皮带轮二和下传动轴转动,然后由皮带轮三、上传动皮带驱动皮带轮四、上传动轴转动,上传动轴左侧的皮带轮五通过拨菜轮传动皮带带动皮带轮六转动,驱动拨菜轮轴和拨菜叶片转动。上传动轴右侧的主动链轮通过链条带动被动链轮和输送主动辊转动,驱动输送带和输送被动辊转动。
2.2 铲菜装置设计
在机架的上方安装有传动装置,在机架的前上方连接了输送装置,在输送装置的前下方连接了限深装置,在输送装置的前方连接了铲菜装置和拨菜装置,在输送装置的前上方连接了偏心装置。
上传动轴通过偏心轴承和连杆推动振动臂上轴绕振动臂中间轴摆动,振动臂上轴在摆动过程中推动振动臂前后往复摆动,振动臂的下部驱动振动铲在地表以下两厘米左右进行铲菜作业,铲下来的菜在栅条前后往复振动作用下将菜根上的土分离落地,分离后的菜在逆时针旋转拨菜叶片的推动下进入到输送带上,然后向后上方输送,当输送到分流挡板位置时,收获的菜从中间被分开集中到两侧,当菜脱离输送带后自然下落到菜筐内,从而完成往复振动铲菜、菜土分离、输送、分流、装筐作业过程。

2.3 配套动力选型设计
江苏省叶菜种植板面较窄,大部分以开沟灌、排水为主,一般的板面在120 cm左右,排水沟密度较大,行走底盘要有一定的过沟通过能力,所以行走底盘不宜大于100 cm。通过调研选型确定采用橡胶履带轻型底盘,变速箱设两个前进工作档:Ⅰ档11 m/min,Ⅱ档13 m/min。两个行走档:Ⅲ档10 km/h,Ⅳ档16 km/h。一个倒档:15 m/min。
发动机采用轻型汽油机。根据120 cm的作业幅宽,铲菜部件采用振动式三角形铲刀,可减少工作阻力。试验表明,振动铲消耗动力在2 kW左右,机组行走部分消耗动力在2 kW左右,所以配套动力选择4.5 kW汽油机。
2.4 振动铲频率设计
振动铲频率的设计原则是以机组11~13 m/min前进速度为计算基础。试验表明,叶菜收获每次进刀量应该在2 cm左右为宜,按机组11 m/min的前进速度计算,振动频率计算为:1 100÷2=550(次/min)。振动铲采用收割机动刀片铆合制造(或者是采用平口斜刃直刀结构),刃口锋利,工作阻力小。振动铲频率设计为500~550次/min,振幅设计为3~5 cm。在振动铲的两侧铲柄上连接有分禾板,在行走过程中自动移动,解决菜秧的分禾问题。
2.5 限深装置设计
在支板上连接了限深轮轴,在限深轮轴上连接了限深轮,通过调整支板孔的高低连接位置,可以控制振动铲的工作入土深度。
在升降下支座和上支架之间连接了升降油缸。当升降油缸伸长时,前面工作部件被升起,便于机组路上行走或地头拐弯;当升降油缸缩短时,前面工作部件被落到地上,便于机组田间作业。
3 样机试验
3.1 试验条件
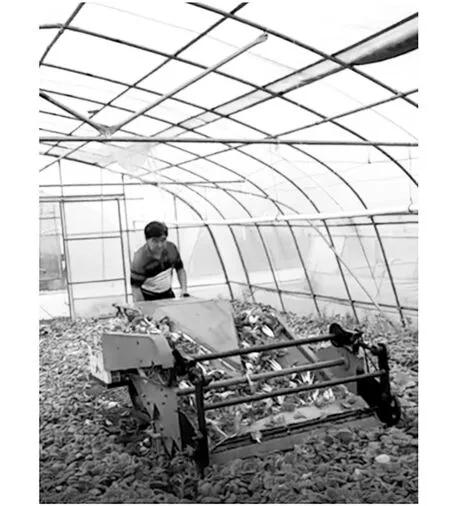
样机在泰州高港区胡庄镇上膳源生态农业发展有限公司8 m棚进行试验。土壤为轻粘土,耕作深度15 cm,土壤含水率25.24%,10 cm深处土壤坚实度为56.18 Pa。收获试验品种选择黑心乌,种植密度97棵/m2,平均高度19.13 cm。
3.2 试验结果
通过试验检测,样机运行稳定,可实现土下铲菜收获,入土切割深度可以调控至合理深度,收获幅宽1.1 m,收获速度0.13 hm2/h(2亩/时)以上,是人工收获的8倍以上。
4 结论
该叶菜土下铲根收获机能够用于叶菜(菠菜、青菜等)切根收获。相比其他收获机,操作方便,且兼具铲菜、收集的功能,便于设施内操作。但机具仍需进一步改进优化,只有减少蔬菜破损率,才能真正替代人工收获。