一种MHD角速度传感器与MEMS陀螺仪组合测量系统信号融合的方法
2018-03-06李醒飞周新力吴腾飞
李醒飞,周新力,吴腾飞,纪 越
一种MHD角速度传感器与MEMS陀螺仪组合测量系统信号融合的方法
李醒飞1,周新力1,吴腾飞1,纪 越2
(1. 天津大学精密测试技术及仪器国家重点实验室,天津 300072;2. 天津工业大学电工电能新技术天津市重点实验室,天津 300387)
为了补偿磁流体动力学(MHD)角速度传感器的低频误差,提出了通过混叠滤波器融合MHD角速度传感器与MEMS陀螺仪信号的方法.该方法根据传感器的复频域模型,设计相应的相位补偿高通滤波器与低通滤波器组成的混叠滤波器,融合两者的信号.对融合前后传感器的输出进行实验对比,结果表明,融合后的输出与MHD角速度传感器相比,低频(0~2,Hz)范围内幅值最大相对误差从99.98%,下降到0.80%,以下,相位最大绝对误差从90°下降到1°以内,同时保证了MHD角速度传感器原有的高频特性,输出幅值在整个工作频段的波动性控制在1%,以内.验证了该种混叠滤波器算法有效性,满足卫星千赫兹带宽的测量要求.
补偿;信号融合;MHD角速度传感器;混叠滤波器
随着航天技术的不断发展,现代高精度航天器对指向精度和姿态稳定度提出了更高的要求.航天器内部的机械运动[1-2]以及空间物理环境的影响[3-5]会使卫星平台出现微弧度甚至纳弧度的微角振动[6],使卫星平台有效载荷的姿态稳定度和指向精度大幅降低.目前,在卫星平台上采用较多的是陀螺仪、星敏感器等多种敏感器组成的高精度低带宽(几十赫兹)[7]姿态测量系统,但鉴于这些传统敏感器的原理对于高频的微角振动衰减严重,无法准确测量卫星平台的高频信息[7].基于磁流体动力学(magneto hydrodynamics,MHD)原理的角速度传感器因具备宽频带、抗冲击等特点,特别适用于高频微角振动测量[8].虽然MHD角速度传感器带宽可到达1,kHz[9],由于原理的限制,其低频(<2,Hz)性能不佳,具体表现为低频幅值衰减与相位误差,且无法响应直流信号,从而导致传感器无法有效地测量航天器真实的运动状态.
国内外相关领域人员为了克服MHD角速度传感器低频性能不佳的缺点,采取了多种方法.例如采用改进磁流体传感器工艺及机械结构,设计补偿电路[8],设计软件补偿算法,采用MHD角速度传感器与高精度陀螺仪进行信号融合的方式进行组合测量等.
综合国外文献,2006年日本航空航天探测署发射的先进陆地观测卫星ALOS[10]中的惯性测量平台、2013年NASA月球激光通信演示(LLCD)[11]系统中的激光通讯稳定平台[12]、NASA火星激光通信演示项目中的惯性基准单元(MIRU)[13-14]以及NASA 拟在激光通信中继演示计划(LCRD)中的惯性稳定平台[15]均采用了MHD角速度传感器与高精度陀螺仪信号融合的方法,实现了0~1,kHz带宽的测量,该方法已应用于美、日等发达国家最先进的航天器上.由此可知,采用2个传感器信号融合的方式是目前实现全频带测量的最佳方案.
目前,国内对于MHD角速度传感器的研究处于原理样机的研制阶段,而运用磁流体角速度传感器与高精度陀螺仪进行信号融合、实现千赫兹测量带宽的方法在国内外的文献中鲜有报道.基于此,本文提出了一种基于混叠滤波器的信号融合方法,该混叠滤波器根据建立的2种传感器复频域模型,设计相应的相位补偿高通滤波器与低通滤波器,实时地融合MHD角速度传感器与高精度陀螺仪的信号,有效补偿了MHD角速度传感器低频(0~2,Hz)范围内幅值衰减与相位误差,同时保证了MHD角速度传感器原有理想的高频特性,输出幅值随频率的波动被控制在一个较小的范围.
1 传感器的特性及复频域模型的建立
1.1 MHD角速度传感器的特性及复频域模型的建立
MHD角速度传感器的原理是基于磁流体动力学效应[16-17],传感器主要由敏感元件与信号检测电路两部分组成. 图1所示为敏感元件部分,流体通道内充满导电流体.当外界有角速度沿转动轴方向输入时,导电流体由于惯性作用保持原有运动状态,此时导电流体与永磁体产生的磁场形成相对运动,产生切割磁力线的效果,从而形成感应电动势.电动势再经过信号检测电路处理得到表征角速度的电压,通过该电压与角速度关系得到待测角速度的大小.
由于导电流体受到黏滞力与电磁力的作用,当流体环随外界旋转的速度较低,流体会随着流体环一起转动,此时流体与流体环之间产生的相对角位移会产生误差.此时表征角速度的电压信号不能反映传感器真实的运动状态.因此,MHD角速度传感器的低频(<2,Hz)性能不佳.为了更加准确地分析传感器的低频性能,对传感器复频域模型进行建模.建模采用的是本实验室自主研制的MHD角速度传感器.

图1 磁流体角速度传感器工作原理
MHD角速度传感器复频域模型可表示为

(1)
1.2 MEMS陀螺仪的特性及复频域模型的建立


(2)
2 混叠滤波器融合算法的设计
传感器融合算法如模糊推理法[19]、神经网络算法[20]、遗传算法[21],由于其复杂性难以满足实时性的要求,而加权平均法等融合频率特性不同的角速度传感器会出现融合后标度因数随频率产生较大变化的缺点,难以满足千赫兹带宽的测量要求.因此,本文提出了一种混叠滤波器融合算法,从而解决上述问题.
2.1 混叠滤波器的设计
混叠滤波器算法流程如图3所示.设计步骤如下.
步骤1标度因数归一化.
将MEMS陀螺仪的标度因数与MHD角速度传感器的标度因数化为一致,具体方式为

(3)
步骤2FIR低通滤波器的设计.
对MEMS陀螺仪进行FIR低通滤波器处理,目的是去除高频噪声以及杂散噪声对MEMS陀螺仪的影响.FIR低通滤波器的引入会对MEMS陀螺仪频率响应产生较大的改变,造成2个传感器融合后输出幅值与相位随频率变化.因此,为了解决上述问题,本步骤针对MEMS陀螺设计了高频噪声提取环节,以去除融合信号中的高频噪声.
步骤3 相位补偿高通滤波器的设计.
根据2个传感器所建立的复频域模型,采用特殊的高通滤波器截断MHD角速度传感器的低频部分,称这个特殊的高通滤波器环节为相位补偿高通滤波器,将截断后的MHD角速度传感器与MEMS陀螺仪进行信号融合,使融合后的输出在2个传感器的截止频率及其中间频段处消除幅值与相位随频率变化的现象,解决融合后标度因数随频率变化的问题.

图3 基于相位补偿高通滤波器的混叠滤波器算法流程
该算法的计算式分别为

(4)

(5)

(6)

(7)

(8)

(9)
相位补偿高通滤波器频率响应如图4所示.相位补偿高通滤波器的幅频曲线具有在低频增益小于1、之后逐渐增大、直到高频恒定为1的特点.其相频曲线具有在低频为0,随着频率的增大,先超前再滞后,最后保持为0的特点.

图4 相位补偿高通滤波器频率响应
2.2 相位补偿高通滤波器的校正效果
图5为经相位补偿高通滤波器校正前后融合的频率响应,图5中虚线表示未经过相位补偿高通滤器融合后的频率响应,在2个传感器的截止频率及其中间频段处,融合后的输出幅值随频率大幅变化,相频响应出现超前与滞后的现象,此时融合后的输出不满足测量要求;实线表示经过相位高通补偿滤波器融合后的频率响应,可以看出,融合后不仅解决了低频范围内幅值衰减与相位变化的问题,还基本消除了幅值与相位随频率变化的问题.

图5 经相位补偿高通滤波器校正前后融合的频率响应
3 混叠滤波器效果验证实验
3.1 测试平台
测试平台分为4个部分,包括速率转台、2个传感器、数据采集卡、工控机.其中,转台的正弦运动可以模拟空间一维的微角振动.速率转台与传感器如图6所示,将MHD角速度传感器安装在速率转台的工装内,MEMS陀螺在工装之上,2个传感器的敏感轴与速率转台的轴线重合.通过工控机控制速率转台转动,转台的速率通过采集转台的模拟输出获得.通过NI公司的数据采集卡同时采集不同频率下2个传感器与转台的模拟输出,并在工控机的Labview软件上进行实时的数据处理.

图6 实验平台
3.2 混叠滤波器校正效果的验证
3.2.1 单频特性的验证
1)直流(0,Hz)响应的验证
转台处于静止状态,5,s之后控制转台以100,(°)/s逆时针匀速转动,以验证传感器在0,Hz的特性.图7为MHD角速度传感器、MEMS陀螺仪、融合后与转台输出的电压幅值.可以看出,在转台从静止启动加速的时候,MHD传感器有电压输出,当转台进入匀速运动状态后,MHD传感器的电压输出变为0,V.而融合后的信号能够响应转台从静止到匀速运动全程的运动状态.实验结果表明:融合后的输出补偿了MHD角速度传感器的直流(0,Hz)输出误差.

2)从低频到高频响应的验证
为了更加全面地验证融合后信号的频率响应,控制转台的运动幅值恒定,进行频率范围为0.01~40,Hz的扫频实验.具体扫频方式如下:0.01~0.09,Hz,频率间隔为0.01,Hz;0.1~0.9,Hz,频率间隔为0.1,Hz;1.0~9.0,Hz,频率间隔为1,Hz;10~40,Hz,频率间隔为10,Hz.将上述扫频实验之后得到的频率点进行曲线拟合,如图8所示.选取其中部分频率点,计算融合前后MHD角速度传感器幅值的相对误差百分比与相位的绝对误差,如表1所示.

图8 扫频实验
由此可知,MHD角速度传感器经过MEMS陀螺仪低频补偿之后,低频(0~2,Hz)范围的幅值与相位误差得到了显著的补偿,幅值相对误差从99.98%,降低到了0.80%,以下,相位绝对差从90°下降到了1°以下;在大于2,Hz的频率范围内,融合后的输出与MHD角速度传感器的输出几乎接近,说明融合后输出保留了MHD角速度传感器较为理想的高频特性.经计算,融合后的输出幅值在0~40,Hz范围内波动程度小于1%,,相位波动控制在了±1°以内,说明标度因数具有较好的一致性.
表1 一定幅值不同频率下的误差

Tab.1 Error at fixed amplitude under different frequency
3.2.2 混频特性的验证
控制转台产生一个混频信号,包含0.05,Hz、0.10,Hz、0.15,Hz、30,Hz、35,Hz、40,Hz 6个低频与高频的单频信号,且6个单频信号的输入角速度均为100(°)/s.如图9所示,分别为MHD角速度传感器、MEMS陀螺仪、融合后、转台的输出电压幅值.MHD角速度传感器响应了混频信号中的高频部分30,Hz、35,Hz、40,Hz的信号,而没有响应低频部分0.05,Hz、0.10,Hz、0.15,Hz的信号;MEMS陀螺仪则相反,响应了混频信号中的低频部分0.05,Hz、0.1,Hz、0.15,Hz的信号,而没有响应高频部分30,Hz、35,Hz、40,Hz的信号;融合后的输出响应了所有实验频段的信号.实验结果表明:融合后的输出同时具有MEMS陀螺仪较为理想的低频性能与 MHD角速度传感器较为理想的高频性能,精确地跟踪上了转台的运动,反映出了转台运动的真实角速度.
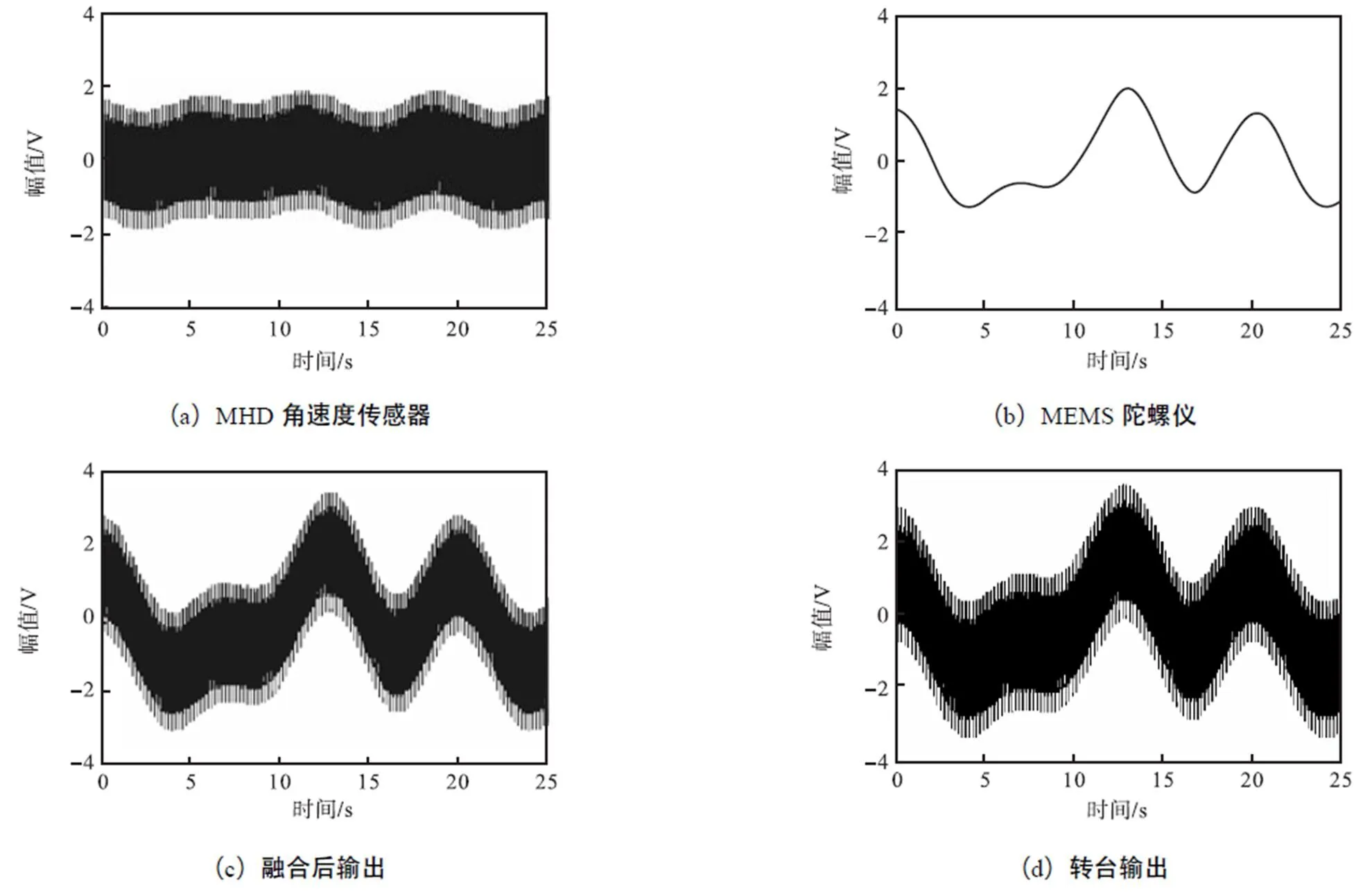
图9 混频响应
转台的模拟电压输出能真实反映转台的角速度,故以转台的输出为基准,分别用2个传感器的输出、融合后输出与转台做差,误差曲线如图10所示,并计算误差曲线的方差,如表2所示.方差数据反映了2个传感器输出、融合后输出与真实角速度的接近程度.由图10可以看出,在混频测试中,MHD传感器的误差曲线低频波动较大,可知其获取了较为准确的高频信息,但低频误差较大;MEMS陀螺仪误差曲线高频波动大,可知其获取了较为准确的低频信息,但其高频误差较大;而融合后误差曲线的低频与高频误差均被抑制在较小的范围内,说明其较为准确地测量出所有实验频段的振动信息.由表2中数据可知,融合后误差的方差较MHD传感器与MEMS陀螺仪误差的方差相比,降低了2个数量级,由此可知融合后的输出更为接近真实的角速度.误差分析结果表明,融合后的输出具有准确响应低频与高频信号的特性.

表2 混频实验误差的方差

Tab.2 Variance of error of mixing frequency
4 结 语
本文对MHD角速度传感器与MEMS陀螺仪进行复频域建模,设计了基于混叠滤波器的信号融合方法,该混叠滤波器通过相位补偿高通滤波器与FIR低通滤波器分别对MHD角速度传感器与MEMS陀螺仪进行信号处理,得到融合后的传感器输出,有效地补偿了MHD角速度传感器的低频误差.通过实验验证,结果表明该信号融合算法利用了MEMS陀螺仪在低频(0~2,Hz)范围的测量优势,有效补偿了MHD角速度传感器在0~2,Hz频率范围内幅值与相位误差,其幅值最大相对误差从99.98%,下降到0.80%,以下,相位最大绝对误差从90°下降到1°以内;同时保证了MHD角速度传感器原有较为理想的高频特性,将测量频段内标度因数随频率的波动控制在1%以内,满足千赫兹带宽的测量要求.
[1] Zhang Yao,Zhang Jingrui,Xu Shijie. Influence of flexible solar arrays on vibration isolation platform of control moment gyroscopes[J].,2012,28(5):1479-1487.
[2] Xu Mingming,Zeng Yi,Liu Wen Qing,et al. Random vibration analysis of rotating parts on satellite environment monitoring instrument[J].,2012(9):114-116.
[3] Aslanov V S,Yudintsev V V. Dynamics of large debris connected to space tug by a tether[J].,2013,36(6):1654-1660.
[4] Ragos O,Haranas I,Gkigkitzis I. Effects in the anomalistic period of celestial bodies due to a logarithmic correction to the Newtonian gravitational potential[J].,2013,345(1):67-72.
[5] Mkrtchyan A R,Navasardian M A,Gabrielyan R G,et al. Controlled focusing of the Å wavelength radiation in case of the ultrasound modulation or temperature gradient[J].,1986,59(3):147-149.
[6] 周东强,曹 瑞,赵 煜. 遥感系列卫星在轨微振动测量与分析[J]. 航天器环境工程,2013,30(6):627-630.
Zhou Dongqiang,Cao Rui,Zhao Yu. Micro-vibration measurement and analysis of a series of remote sensing satellites in-orbit[J].,2013,30(6):627-630(in Chinese).
[7] 金 钊,高晶敏,杨鸿波. 一种基于卡尔曼滤波的姿态信息融合方法[J]. 北京信息科技大学学报,2015,30(1):85-89.
Jin Zhao,Gao Jingmin,Yang Hongbo,et al. Kalman filtering-based attitude informantion fusion method[J].,2015,30(1):85-89(in Chinese).
[8] 张少强,李醒飞,吴腾飞. 磁流体动力学角速度传感器低频误差分析及校正方法研究[J]. 传感技术学报2015,28(11):1634-1639.
Zhang Shaoqiang,Li Xingfei,Wu Tengfei. Error analysis in low frequency region and correction method of MHD angular rate sensor[J].,2015,28(11):1634-1639(in Chinese).
[9] Pinney C,Hawes M A,Blackburn J. A cost-effective inertial motion sensor for short-duration autonomous navigation[C]//. Las Vegas,NV,USA,1994:591-597.
[10] Iwata T,Kawahara T,Muranaka N,et al. High-bandwidth attitude determination using jitter measurements and optimal filtering[C]//,. Chicago,Illinois,USA,2004:385-394.
[11] Khitri F I,Robinson B S,Semprucci M D,et al. The lunar laser communications demonstration operations architecture[J].,2015,111(10):77-83.
[12] Boroson D M,Robinson B S,Murphy D V,et al. Overview and results of the lunar laser communication demonstration[J].,2014,8971(10):1-11.
[13] Hawe L E. Control of a Fast Steering Mirror for Laser-Based Satellite Communication[D]. California:Massachu-setts Institute of Technology,2006.
[14] Boroson D M,Scozzafava J J,Murphy D V,et al. The lunar laser communications demonstration(LLCD)[C]//. Pasadena,CA,USA,2009:23-28.
[15] Luzhansky E,Edwards B,Israel D,et al. The overview and status of laser communications relay demonstration[C]//San Francisco,USA,2016:9739.
[16] Laughlin D,Sebesta H,Eckelkamp-Baker D. A dual function magneto hydrodynamic(MHD)device for angular motion measurement and control[C]//2. Breckenridge:Colorado,USA,2002,111:335-347.
[17] Laughlin D R,Smith D. Development and performance of an angular vibration sensor with 1—1000,Hz bandwidth and nanoradian level noise[J].,2002,4489(2):208-214.
[18] 刘天亮,高胜利. 硅微陀螺仪随机漂移建模及滤波[J],电子测量技术,2010,33(9):33-34.
Liu Tianliang,Gao Shengli. Filter and model of silicon micro-gyroscope random drift[J].,2010,33(9):33-34(in Chinese).
[19] 裴道武. 关于模糊逻辑与模糊推理逻辑基础问题的十年研究综述[J]. 工程数学学报,2004,21(2):1005-3085.
Pei Daowu. A survey of ten years’ studies on fuzzy logic and fuzzy reasoning[J].,2004,21(2):1005-3085(in Chinese).
[20] 张 凯,钱 锋,刘漫丹. 模糊神经网络技术综述[J]. 信息与控制,2003,32(5):431-435.
Zhang Kai,Qian Feng,Liu Mandan. A survey on fuzzy neural network technology[J].,2003,32(5):431-435(in Chinese).
[21] 戴朝华,朱云芳,陈维荣,等. 云遗传算法及其应用[J]. 电子学报,2007,35(7):1419-1424.
Dai Zhaohua,Zhu Yunfang,Chen Weirong,et al. Cloud model based genetic algorithm and its application [J].,2007,35(7):1419-1424(in Chinese).
(责任编辑:王新英)
A Method of Signal Fusion for Combination Measurement System of MHD Angular Rate Sensor and MEMS Gyro
Li Xingfei1,Zhou Xinli1,Wu Tengfei1,Ji Yue2
(1.State Key Laboratory of Precision Measuring Technology and Instruments,Tianjin University,Tianjin 300072,China;2.Key Laboratory of Advanced Electrical Engineering and Energy Technology,Tianjin Polytechnic University,Tianjin 300387,China)
To compensate for the low frequency error of Magneto hydrodynamics(MHD)angular rate sensor,an aliasing filter which fused the signals of the MHD angular rate sensor and the MEMS gyro was proposed.According to thecomplex frequency domain model of the sensors,an aliasing filter,which was made up of phase compensate high-pass filter and low-pass filter,was designed.Comparative experiments were conducted before and after fusion.Compared with MHD angular rate sensor,the results show that in the frequency region of 0—2,Hz,the maximum relative error of amplitude decreases from 99.98%, to lower than 0.80%,,while the maximum absolute error of phase decreases from 90° to lower than 1°.The method inherits the ideal characteristics in high frequency region of MHD angular rate sensor and the volatility of amplitude is restricted to 1%,.The aliasing filter algorithm is verified to be efficient,which meets the requirements of 1,kHz bandwidth of satellite.
compensation;fusion of signal;MHD angular rate sensor;aliasing filter
10.11784/tdxbz201704019
TH73
A
0493-2137(2018)02-0159-08
2017-04-09;
2017-08-24.
李醒飞(1966— ),男,博士,教授.
李醒飞,lixf_mhd@163.com.
国家自然科学基金国家重大科研仪器研制项目(61427810);天津市自然科学基金(青年项目)资助项目(16JCQNJC04500,17JCQNJC04100);国家自然科学基金青年科学基金资助项目(61703303).
the National Natural Science Foundation of China and National Project for Research and Development of Major Scientific Instruments(No.,61427810),the National Natural Science Foundation of Tianjin(No.,16JCQNJC04500 and No.,17JCQNJC04100) and the young Scientists Found of the National Natural Science Foundation of China(No.,61703303).
