基于Adaboost的无源RFID射频层析成像伪目标识别
2018-03-06马永涛
马永涛,高 鑫
基于Adaboost的无源RFID射频层析成像伪目标识别
马永涛,高 鑫
(天津大学微电子学院,天津 300072)
被动式定位(DFL)中的射频层析成像(RTI)算法主要运用在无线传感器网络(WSN)中.而物联网的快速普及使得无线射频识别(RFID)网络随处可见,所以本文提出了在无源RFID网络下实现RTI的被动式定位算法.针对多目标情况下的伪目标问题,提出了一种基于Adaboost的机器学习算法来去除伪目标,最终在目标数目未知的前提下实现至少3个目标的准确识别.实验结果表明提出的方法可行性很高,在定位误差为0.7,m时目标识别准确度达到86%,.
被动式定位;射频层析成像;无线射频识别;机器学习
在今天无处不在的智能技术研究中,一个巨大的挑战就是获取用户在室内环境的位置估计.目前室外的定位方式主要是依靠卫星定位,如美国的GPS全球定位系统,俄罗斯的GLONASS定位系统,欧盟的GALILEO计划,当然还有我国的北斗卫星导航系统.目前卫星定位在室外的定位精度基本上可以达到10,m以内.但是这种定位方式有2个缺陷:①在室内GPS的定位精度急剧下降;②这种定位方式需要被定位目标携带信号发射器,如手机、智能手表等.而在某些情景下目标不会主动携带这些设备,比如敌人入侵的时候.这时就需要一种不以待定位目标的意志所转移的方式来实现定位,这就是被动式定位[1],被动式定位(device-freelocalization,DFL)的概念一经提出就迅速吸引了很多学者的注意,并相继发表了大量高水平论文[2-10],可以预见在未来很长一段时间都是一个研究的热点.DFL的另一个优点是在得到目标位置的同时又实现了对目标隐私的保护功能,不同于摄像头直接把目标的一举一动都放在了眼前,而且摄像头还对光照敏感[11].
DFL不需要目标携带任何无线设备.当目标进入到定位区域后,不可避免地会遮挡一部分无线通信链路,从而造成这些链路信号强度上的变化.而目标处在不同的位置遮挡的链路是不同的,造成的链路的改变也是不同的.因此,基于链路的测量信息来推测目标的位置是合理可行的.
实现DFL的方法有很多,其中射频层析成像(radio tomographic imaging,RTI)是一种新颖的解决方式[12-13].射频层析成像的基本思想是把定位区域划分成大小相等的网格(像素点),网络中每条链路的衰减等效成该条链路穿过的所有网格的衰减值之和.然后建立数学模型,通过求解矩阵方程组,反解出每个像素点衰减的像素值.最后以图像的方式把这些像素值成像出来,在图像中最亮的区域即为最终的目标位置.该算法因其具有计算复杂度低、定位精度高、不需要训练数据、实时性好的优点而受到了关注,其中尤以美国的犹他大学对此研究得最为深刻. Zhao等[14-15]先后提出用子空间分解法(SubVRT)和方差最小二乘法(LSVRT)来减少基于方差的被动式定位中的噪声来实现目标的精确定位与跟踪.另一个研究重点是RTI的权重模型.Inverse Area Elliptical模型[16],基于衰落水平的空间权重模型[17]和基于几何学的椭圆权重模型[18]的提出,使得RTI算法更加实用.中山大学的Huang等[19]提出一种数据高效的RTI方案,旨在利用链路的衰减水平信息以及贝叶斯压缩感知算法来实现自适应的链路选择.该方案的优点是排除了信息量少而且衰落不确定度很高的链路,从而高效地利用测量数据并提高了定位性能.
然而上述文献中所提到的RTI算法几乎都是以传统的WSN为基础来实现DFL.本文提出在无源RFID网络下实现RTI被动式定位算法.RFID技术是物联网领域的一项关键性技术,近年来受到了广泛关注,并发展迅速.由于RFID技术也是一种无线通信技术,并且容易得到标签和阅读器天线通信时的接收信号强度(RSS).由此可以想到,RFID系统也可用于实现被动式定位.与无线传感器网络相比,该系统主要有两方面的优势:① 成本更低:物联网的飞速发展使得RFID的成本不断降低,特别是无源标签的成本越来越小,同时定位系统只需要少量的阅读器天线;② 维护费用低:无源标签无需电池供能,不怕油渍、灰尘污染等恶劣的环境,使用寿命长,而且易于布置.
本文研究了在无源RFID场景下的RTI被动式定位方法,并针对在定位区域出现多个目标时RTI算法定位性能急剧下降问题提出了一种新的解决方案,充分利用成像后图片的特点,并与机器学习算法相结合,排除伪目标点,精确识别目标的位置和个数.并对所提出的算法做了实验验证.本文的结构如下:第1节介绍如何在无源RFID场景下实现RTI算法;第2节提出多个目标出现时的问题模型;第3节给出多目标问题解决方案;第4节进行实验验证和结果分析;第5节作出总结并展望未来.
1 无源RFID场景下的RTI
1.1 RTI
RTI算法源于人们所熟悉的雷达扫描和CT成 像[13].以往对RTI算法的研究都是基于无线传感器网络,进入监控区域的目标会引起区域中无线链路RSS的改变,而被影响的链路携带了目标的位置信息.射频层析成像算法就是对这种相互关系进行数学建模,最后用成像的方式显示定位结果.假设定位区域被分成个相同大小的网格.当目标进入网格区域后,某些链路因被遮挡而产生了衰减,把该条链路的衰减等效成这条链路穿过的网格的衰减.用数学公式表示为[13]

(1)
式(1)求解的经典方法是最小二乘估计,但这里涉及到矩阵的求逆,从而形成了数学上的不适定问题.常用的方法是在最小二乘的基础上使用正则化技术,最后可得[13]

(2)

(3)
1.2 无源RFID场景下实现RTI-DFL
RFID系统由阅读器、标签、阅读器天线以及对应的软件所组成.这里的无源指的是无源标签,当然还有有源标签.但无源标签体积小,成本低,可以实现大规模地布置在室内各处,比如贴在墙上或放在地毯下面.随着物联网的加速发展,其核心的RFID技术将会有更大的应用范围,所以本文研究了如何在无源RFID场景下实现RTI被动式定位.
首先模仿无线传感器网络下的定位场景,无源RFID系统的定位场景设置如图1 所示.本文中把阅读器天线放置在每条边的中点,主要是为了使通信链路尽量覆盖全部的定位区域,并且让每个网格的链路密度最大限度地均匀分布.这里的链路密度定义为穿过一个网格的链路的总条数.另一种分布是将阅读器天线放在4个角落,但仿真结果表明定位效果不如前一种布置方式好.这里需要说明的一点是,在固定大小的定位区域中应该存在最优的布置方式以及最优的标签、阅读器数量.这也是今后的一个研究 方向.

图1 无源RFID场景下的RTI被动式定位示意
在RFID系统中应用RTI算法,首先需要得到定位区域中每条通信链路的RSS变化量.在RFID系统中,一条完整的通信链路包括两部分:由阅读器天线发射无线信号到标签称为前向链路;由标签把无线信号反射回阅读器天线称为后向链路.每条链路返回的RSS值可以在阅读器终端直接获得.那么当目标遮挡了某条链路时,RSS会如何变化呢?有学者提出了一种模型来模拟这种变化[20].

(4)

(5)


(6)

(7)
2 多目标问题
RTI算法基于两个前提:①目标的出现会引起定位区域中特定的无线通信链路的RSS衰减;②受影响的链路的RSS衰减可以等效为该条链路穿过的像素点的衰减之和.那么直观上的感觉就是多条受影响链路的交点形成了最终目标的位置.定位区域中如果只出现一个目标时,把上述交点作为目标的位置可信度很高.但是当出现两个以上的目标时,仅仅把不同链路的交点当做目标位置就不再可行.因为当出现多个目标时,会随之出现伪位置点,而这些点也是受影响链路的交点,如图3所示.
RTI算法最终的结果是一幅二维图像,在图像中最亮的区域为目标所在区域,而这些最亮的区域是由多条受影响的链路相交而成.从图3中可以发现,当出现两个以上的目标时,受影响的链路的交点随之变多,反应到成像结果图像上就是局部最亮区域变多.这里把那些多余的交点称为伪目标点.而在预先不知道目标数目的情况下,这时的定位结果就显得毫无意义.那也就意味着RTI算法在无源RFID场景下只能实现单个目标的定位.
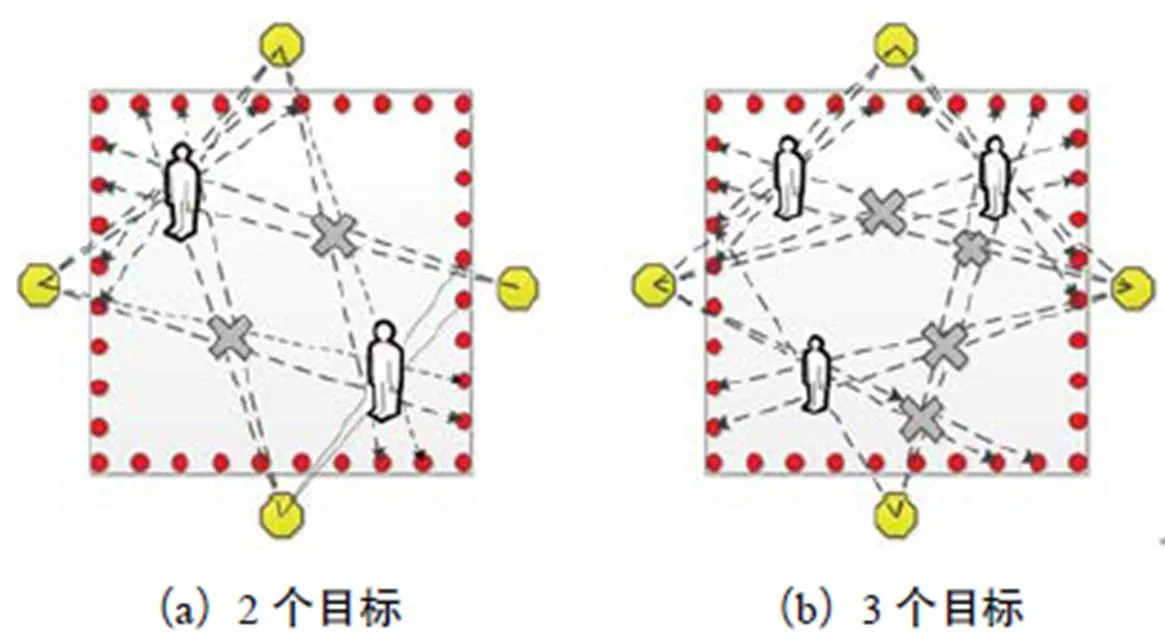
图3 多个目标出现时的RTI算法成像结果
在这种情况下只有2种选择.①在定位之前想办法得到目标的个数,然后再设法排除伪位置.比如用阈值法直接把前几个最亮的区域作为真实目标.②直接去除伪目标,在确定目标位置的同时确定目标的个数.在实际情况下,第2种情形更为常见.
3 基于Adaboost算法的多目标识别
本文的思路是既然RTI算法的结果是一幅图像,那么就可以直接在图像上寻求解决问题的方法.那么如何把图像中的真实目标点和伪目标点分开,即去除伪目标点.定位问题已转变为一个二分类问题.需要做的就是想办法寻找或提取待分类问题的特征,最后用合适的分类算法实现自动分类.
3.1 “热点”区域
如图 4所示,无论是真实目标点还是伪目标点在成像结果上都以局部最亮区域出现.这些局部最亮区域被形象地称为“热点”区域.首先需要把成像结果中的所有热点都找出来.这些热点也就是本分类问题中的样本.在图像中,热点即在一定范围内像素值最大的像素点.在数字图像处理中有许多方法可以实现区域提取,本文采取的是最简单的方法.想要得到局部最亮区域可以先找到局部最大值点,通过比较每一个像素点与其周围相邻的8个或16个像素点的像素值大小来作出判断.如果该像素点的值最大,则认为其为一个局部最大值点.遍历图像中所有的像素点,找出并记录所有的局部最大值点的坐标.找到了局部最大值点,即找到了局部最大区域.在本文中局部最大区域指以局部最大值为中心的24个像素点组成的区域.
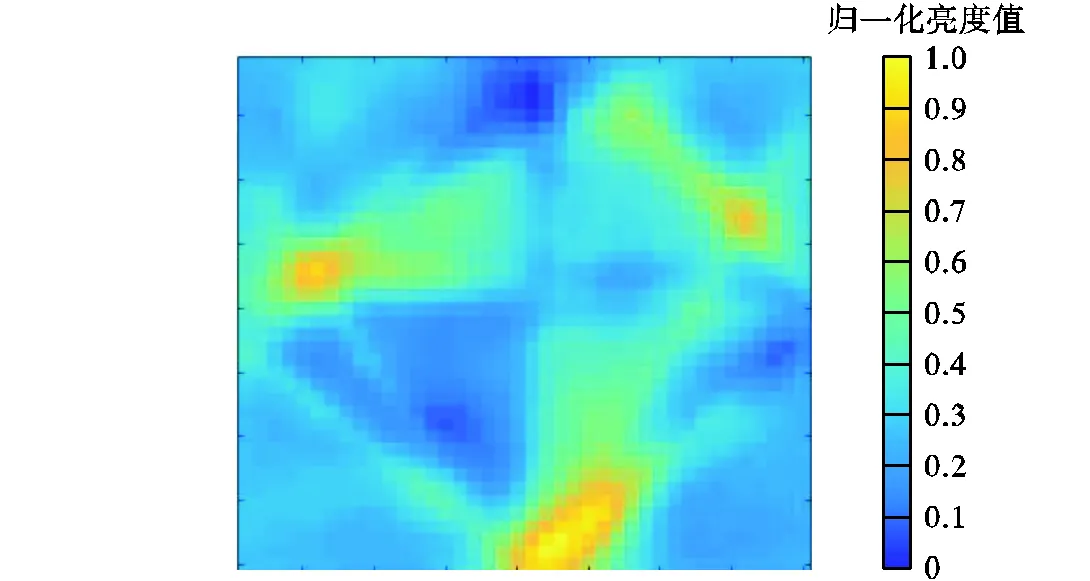
图4 无源RFID场景下的RTI算法仿真结果
3.2 特征计算


(8)
3.3 Adaboost分类器
机器学习(machine learning,ML)现在已成为各个领域的学者们争先研究的一门学问.机器学习算法是一类从数据中自动分析获得规律,并利用规律对未知数据进行预测的算法.而Adaboost元算法就是其中的一种[21].
Adaboost是adaptive boosting的缩写.其核心思想是利用弱分类器和多个实例来构建一个强分类器.这里的弱指的是分类器的性能比随机猜测稍好,但不会好很多.在本文中笔者使用简单的单层决策树作为弱分类器.单层决策树就是一种最简单的决策树,仅基于单个特征来做决策.


(9)

(10)
本文之所以采用Adaboost算法来进行伪目标的识别,有两点原因:①Adaboost算法适用于大部分的分类问题,尤其在数据集的特征类别不多的情况下也能实现很好的分类性能,并且不需要手动调整参数;②在训练的时候只需要少量的样本就可以达到训练效果,因为它可以重复利用样本,算法原理相对简单,易编程实现.Adaboost算法的示意如图5所示.

图5 Adaboost算法示意
图5中,左边是输入的样本数据,直方图的不同长度代表不同样本的权重大小,每迭代一次各个样本的权重都要重新计算,迭代次后把个弱分类器加权相加,经判决函数判决后输出类别结果.
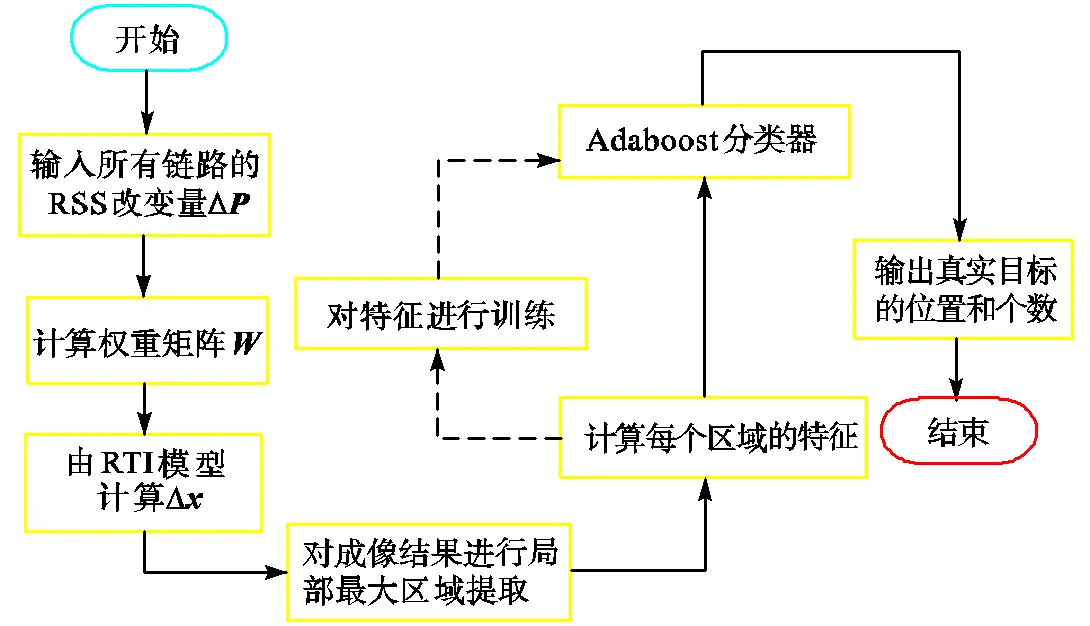
图6 无源RFID场景下的RTI被动式定位流程
4 实验仿真
4.1 实验设置
为了对本文所提出的方法进行验证,笔者在真实场景下做了实验,并用MATLAB对实验数据进行了仿真.本实验室从美国英频杰公司引进了一套完整的无源超高频RFID系统,包括阅读器R420,4个阅读器天线以及大量的无源标签,如图7所示.
图7中,实验区域大小为4.8,m×4.8,m.每个标签相距0.3,m,共40个标签.定位区域划分为40×40个正方形网格,每个网格边长为0.1,m.实验开始时,需要先选择样本点进行训练.该方法不需要输入大量的样本,本实验只是让目标站在几个预先设定好的位置来测量数据,而且把不同数量的目标出现时的数据一起进行训练.由于RSS值比较容易受周围环境的干扰,所以在每次记录时至少测10组数据求其均值作为后续的数据使用.分类器训练好之后,随机地让不同数目的目标随机站在定位区域中进行定位验证.这里有一个要求是,多个目标出现时,彼此的距离不能小于1,m.因为如果不满足这个条件,在成像结果中两个目标只有一个热点,这种情况就变成了另一个需要研究的问题,即在多个目标离得很近时如何判断目标的数目.

图7 无源RFID场景下的具体实验布置
4.2 实验结果
正如第2节所述一样,直接在无源RFID系统中应用RTI算法会出现很大的问题,当两个以上的目标出现在定位区域中后,会在定位结果中出现伪目标,如图8所示.在事先不知道目标数目的情况下,定位就变得更加困难.而在经过本文所提方法的处理后,可以准确轻易地获得目标的数目和位置.
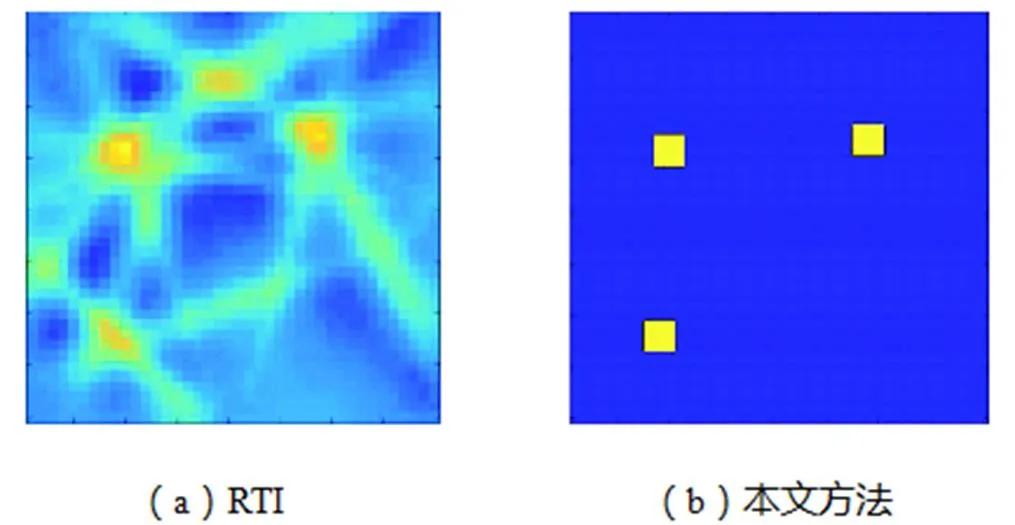
图8 无源RFID场景下3个目标的RTI与本文算法的定位结果
4.3 结果分析
大量数据仿真后的定位误差累积分布函数(cu-mulative distribution function,CDF)曲线如图9所示.
从图9中可以看出,在1个目标、2个目标和3个目标场景下,本文所提出的方法可以分别以97%,、87%,和86%,的概率使得定位误差小于1,m.将本文算法与Wagner等[22]提出的PDE(polygon distance estimation)方法作出比较.PDE算法的思想是构造一个虚拟的多边形,这个多边形的顶点由成像结果中的热点组成.首先计算每对顶点的欧式距离,然后把距离最大的两个顶点作为真实目标点.原文中该方法其实只适用于2个目标情况,而且对2个目标的相对位置依赖性很大,如果是3个目标情况则基本失去了识别能力.本文在仿真过程中笔者根据上述算法的思路,在3个目标情形下,先按照上述方法确定距离最大的两个目标,然后把与前2个目标距离最大的热点作为第3个目标.实验结果如图9所示,相比于PDE方法,本文所提出的方法即使在3个目标情况下也能保持相对高的定位精度.

图9 无源RFID场景下的RTI定位性能曲线
此外,在本实验场景下经过多次重复实验后,经过统计计算分别得到本算法在本实验条件下1个目标的平均定位误差为0.57,m,2个目标为0.72,m,3个目标时为0.78,m.对于本文所提出的方法来说,定位性能固然重要,但更重要的是分类器的性能,因为笔者需要先准确分类真实目标和伪目标,才能确定真实目标的位置和个数.所以还需要对分类器的性能作出评价.在一个二分类问题中,如果一个正例被判为正例,就认为产生了一个真正例(TP);如果一个反例正确判为反例,就认为产生一个真反例(TN),相应地,另外两种情况分别称为伪反例(FN)和伪正例(FP).图10直接给出本方法下的ROC曲线[23].

图10利用20个单层决策树的Adaboost-RTI定位系统的ROC曲线
在图10的ROC曲线中,横轴是伪正率(伪正率=FP/(FP+TN)),纵轴是真正率(真正率=TP/(TP+FN)).图中的曲线是随机猜测的结果曲线,左下角对应着把所有样例判为反例的情形,右上角则是都判为正例的情况.在理想情况下,最佳的分类器应尽可能的位于左上角,这就意味着在伪正率很低的同时得到了很高的真正率.本文的问题中就是把伪目标全部排除而剩下了真实目标.
对不同的ROC曲线进行比较的一个指标是曲线下的面积AUC(area unser the curve),表示分类器的平均性能值.完美分类器的AUC值为1,随机猜测为0.5.图10中从上往下分别是1个目标、2个目标和3个目标时的ROC曲线,对应的AUC值分别为0.97、0.92、0.86.
5 结 语
本文提出了在无源RFID场景下实现RTI被动式定位,并针对RFID场景下多个目标出现时的伪目标问题,提出了基于Adaboost分类器的一套完整方法来实现伪目标的识别,最终在目标数目未知前提下准确识别真实目标的数目与位置,并做了大量的仿真实验来验证所提方法的可行性.结果表明该方法有一定的研究应用价值.由于实验场地以及实验设备的局限性,只做到了3个目标的识别.但随着物联网技术的进一步发展,RFID系统的通信距离和抗干扰能力必定会大大提升,到时就可以实现更大范围更多目标的被动式定位,比如在大型商场布置大量的无源RFID标签实现定位.
[1] Youssef M,Mah M,Agrawala A. Challenges:Device-free passive localization for wireless environments[C]//. New York,USA,2007:222-229.
[2] Zhou Zimu,Yang Zheng,Wu Chenshu,et al. Omnidirectional coverage for device-free passive human detection[J].,2014,25(7):1819-1829.
[3] Wang Jie,Gao Qinhua,Pan Miao,et al. Towards accurate device-free wireless localization with a saddle surface model[J].,2016,65(8):6665-6677.
[4] Hong J,Ohtsuki T. Signal eigenvector-based device-free passive localization using srray sensor[J].,2015,64(4):1354-1363.
[5] Brad M,Philip L,Neal P. Fingerprint-based device-free localization performance in changing environments [J].,2015,33(11):2429-2438.
[6] Wang Ju,Chen Xiaojiang,Fang Dingyi,et al. Transferring compressive sensing based device-free localization across target diversity[J].,2015,62(4):2397-2409.
[7] Wang Jie,Gao Qinghua,Wang Hongyu,et al. Device-free localization with multidimensional wireless link information[J].,2015,64(1):356-366.
[8] 刘 凯,夏 然,柴 柯. 结合菲涅尔理论的免携带设备定位研究[J]. 传感技术学报,2015,28(2):297-302.
Liu Kai,Xia Ran,Chai Ke. The study of device free localization with wireless networks based on fresnel theory[J].,2015,28(2):297-302(in Chinese).
[9] Wang Jie,Gao Qinghua,Yu Yan,et al. Time and energy efficient TOF-based device-free wireless localization[J].,2016,12(1):158-168.
[10] Talampas M C R,Low K S. A geometric filter algorithm for robust device-free localization in wireless networks [J].,2016,12(5):1670-1678.
[11] Wang Jie,Zhang Xiao,Gao Qinghua,et al. Device-free wireless localization and activity recognition:A deep learning approach[J].,2017,66(7):6258-6267.
[12] Neal Patwari,Piyush Agrawal. Effects of correlated shadowing:Connectivity,localization,and RF tomo-graphy[C]//New York,USA,2008:82-93.
[13] Joey Wilson,Neal Patwari. Radio tomographic imaging with wireless networks[J].,2010,9(5):621-632.
[14] Zhao Yang,Neal Patwari. Noise reduction for variance-based device-free localization and tracking[C]//,Salt Lake City,USA,2011:179-187.
[15] Zhao Yang,Neal Patwari. Robust estimators for variance-based device-free localization and tracking[J].,2015,14(10):2116-2129.
[16] Hamilton B R,Ma X L,Baxley R J,et al. Propagation modeling for radio frequency tomography in wireless networks[J].,2014,8(1):55-65.
[17] Ossi K,Maurizio B,Neal P. A fade level-based spatial model for radio tomographic imaging[J].,2014,13(6):1159-1172.
[18] Lei Qian,Zhang Haijian,Sun Hong,et al. A new elliptical model for device-free localization[J].,2016,16(4):577.
[19] Huang Kaide,Luo Yubin,Guo Xuemei,et al. Data-efficient radio tomographic imaging with adaptive bayesian compressive sensing[C]//. Lijiang,
China,2015:1859-1864.
[20] Lieckfeldt Dominik,You Jiaxi,Timmermann Dirk. Characterizing the Influence of human presence on bistatic passive RFID-System[C]//,. Marrakech,Morocco,2009:338-343.
[21] Canovas O,Lopez-De-Teruel P E,Ruiz A. Detecting indoor/outdoor places using WiFi signals and adaBoost [J].,2017,17(5):1443-1453.
[22] Wagner B,Timmermann D. Approaches for device-free multi-user localization with passive RFID[C]//New York,USA,2013:1-6.
[23] Wunderlich A,Goossens B,Abbey C K. Optimal joint detection and estimation that maximizes ROC-type curves[J].,2016,35(9):2164-2173.
(责任编辑:王晓燕)
Adaboost-Based Radio Frequency Tomography for False Target Recognition in Passive RFID
Ma Yongtao,Gao Xin
(School of Microelectronics,Tianjin University,Tianjin 300072,China)
The radio tomographic imaging(RTI)algorithm in device-free localization(DFL)was mainly used in wireless sensor network(WSN).While with the rapid development of the internet of things,the wireless radio frequency identification devices(RFID)network can be seen everywhere.So the idea of realizing the RTI algorithm in passive RFID network is proposed.The Adaboost-based machine learning algorithm was presented to remove the false goal for multiple target situations.Finally,the accurate identification of at least three targets was realized on the premise that the target number was unknown.Experimental results show the feasibility of the proposed method is very high,and the target recognition accuracy reaches 86%, when the position error is 0.7,m.
device-free localization;radio tomographic imaging;wireless radio frequency identification devices;machine learning
10.11784/tdxbz201703015
TN911.7
A
0493-2137(2018)02-0135-08
2017-03-09;
2017-05-02.
马永涛(1979— ),男,博士,副教授.
马永涛,mayongtao@tju.edu.cn.
国家自然科学基金资助项目(61671318).
the National Natural Science Foundation of China(No.,61671318).
