车用内置式永磁同步电机SPWM控制系统建模及仿真
2018-03-05赵海艳罗先云罗媚媚石书琪彭志华
林 立,赵海艳,罗先云,罗媚媚,石书琪,彭志华,姚 楠
(邵阳学院 多电源地区电网运行与控制湖南省重点实验室,湖南 邵阳,422000)
1 车用永磁同步电机SPWM矢量控制系统结构及原理
1.1 车用永磁同步电机SPWM矢量控制系统结构
车用永磁同步电机SPWM矢量控制系统结构如图1所示,系统由车载蓄电池、滤波器、三相逆变器和永磁同步电机构成主电路,电机通过3s/2r变换及其反变换2r/3s实现矢量控制,逆变器采用SPWM控制技术。车用永磁同步电机SPWM矢量控制系统,用基于DSP2812的驱动器实现[8]。

图1 车用永磁电机SPWM矢量控制系统结构Fig.1 Structure of SPWM vector control system for PMSM
1.2 PMSM矢量控制原理
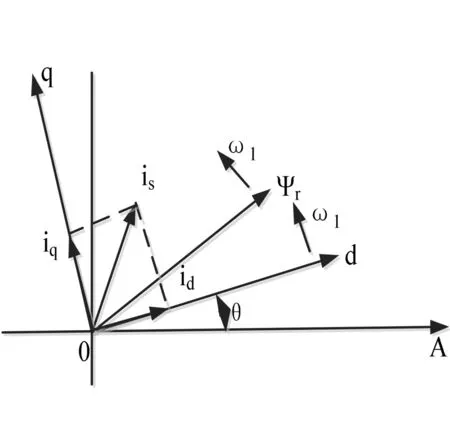
图2 矢量控制坐标变换图Fig.2 Vector control coordinate transformation
PMSM矢量控制是基于直流电机控制的思想,将PMSM等效为直流电机实施控制的一种策略。正弦波永磁同步电动机控制系统定子电压为正弦波,一般采用按转子磁链定向控制方式,图2是矢量控制的坐标变换图,将旋转d-q坐标系d轴放在转子磁链ψr方向上,即按转子磁链定向,实现矢量控制。令定子电流励磁分量id=0,则定子电流中只含有转矩分量,在相同定子电流时电动机产生的转矩最大,即最大转矩比电流控制。
按转子磁链定向并使永磁同步电动机由三相逆变器供电,转子位置传感器PG检测电动机转速ω和转角θ,并计算sinθr和cosθr。由转速调节器ASR和电流调节器q-ACR得到定子电压的转矩分量usq.。按最大转矩比电流控制原则,设定定子励磁电流分量id=0,经d-ACR电流调节器输出ud,ud和u0经2r/3s变换得到SPWM调制器的三相电压调制信号。定子电流经检测并通过3s/2r变换,得到定子电流的转矩分量iq作为电流的反馈信号。系统转速由驾驶员给定从而实现PMSM系统SPWM矢量控制[8]。
1.3 永磁同步电机数学模型
建立车用永磁同步电机的数学模,作如下假设:
(1)忽略定、转子贴心磁滞,不计涡流及磁滞损耗;
(2)永磁材料的电导率为零,永磁体内部的磁导率与空气相同;
(3)转子上没有阻尼绕组;
(4)永磁体产生的励磁磁场和三相绕组产生的磁场正弦分布;
3)通过收集现场相关故障信息及波纹表明,110kV那曲变#1、#2两台主变并列运行,且#1主变中性点接地运行情况下,故障当时那曲#1主变高压侧基本无3I。故障零序电流流过,那安线上流过的故障零序电流基本与当那线上流过的故障零序电流持平。
(5)稳态运行时,相绕组中感应电动势波形为正弦波。
则在以上假设下,PMSM在d-q坐标系下,可建立数学模型,其电压方程为:
(1)
磁链方程为:
(2)
转矩方程为:
Te=1.5np[ψriq+(Lsd-Lsq)idiq]
(3)
运动方程为:
(4)
式(1)-(4)中,ud、uq、id、iq为定子d-q轴坐标系下的电压和电流;Ld、Lq为等效定子二相绕组自感;ω为同步旋转角速度;ψr为转子磁链;p为微分算子;J为电机转动惯量,np为极对数,TL为负载转矩。
1.4 逆变器SPWM控制原理
SPWM控制即正弦脉宽调制技术,以正弦电压作为电压型逆变器期望输出波形,以频率比正弦波高得多的等腰三角波作为载波,并用频率和期望输出频率相同的正弦波作为调制波。调制波与载波相交时刻确定逆变器开关器件的通断,从而可以获得两边窄中间宽的一系列等幅不等宽的矩形波。而通断时刻是指正弦波大于三角波时,上桥臂导通,下桥臂关断;正弦波小于三角波时,上桥臂关断,下桥臂导通[9]。
SPWM一般采用双极性控制方式,即在正弦调制波的半个周期内,三角载波在正负极性之间连续变化,SPWM波也在正负极性之间变化。双极性控制方式原理图如图3所示,在ur的一周期内,输出的PWM波形只有正负U0两种电平,仍然在调制信号ur和载波信号uc的交点时刻控制各个器件的通断[10]。
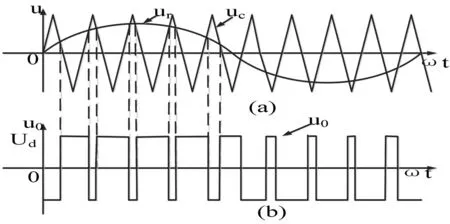
图3 双极性调制原理图Fig.3 Bipolar modulation principle
2 系统仿真模型的建立
依据第1节分析的工作原理,可以在Matlab/Simulink环境下建立PMSM电机SPWM矢量控制系统仿真模型。
2.1 PMSM仿真模型
由永磁同步电机定子电压、磁链、转矩和运动方程可组成的PMSM数学模型可以搭建PMSM仿真模型。由式(1)-(4)可推导得到dq坐标系下的电压和电流关系,以ud,uq,ω作为输入量,id,iq作为输出量,可建立PMSM电压、电流仿真模型,如图4所示。

图4 PMSM的电压和电流仿真模型Fig.4 Simulation model of PMSM voltage and current
由式(1)-(4)可知,id,iq,TL作为输入量,Te,ω既作为输入量,又作为输出量,θ为输出量,调用Simulink中的模块可建立电磁转矩真模型如图5所示。

图5 永磁同步电机电磁转矩仿真模型Fig.5 Electromagnetic torque simulation model of PMSM
经过Clarke变换和Park变换及其逆变换,可将三相静止坐标系的物理量(如电压、磁链、电流)变换到两相旋转两相坐标系中,也可将旋转坐标系下物理量(电压、磁链、电流)变换到三相静止坐标系下。在三相静止坐标系中,PMSM数学模型因三相定子绕组之间的耦合情况与转子的位置密切相关,使其电感矩阵非常复杂,经过坐标变换,可简化耦合,选两相坐标系将d轴始终定位在转子磁极轴线上的转子坐标系,电感矩阵会简化为常数,数学模型得到简化。通过矩阵变换可将三相静止定子绕组电压变化到dq旋转坐标系中的两相绕组电压,图6是3s/2r变换仿真模型,里面采用一个Mux模块将4个输入信号合成一个,然后采用两个函数模块进行3相ABC静止坐标系到dq坐标系的旋转变换,输入为uA、uB、uC,输出为ud、uq。
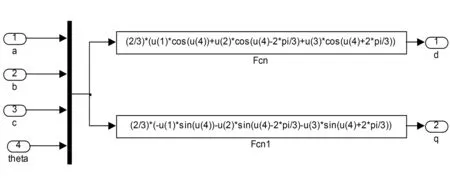
图6 ABC-dq坐标变换模型Fig.6 ABC-dq coordinate transformation model
同理,经过坐标变换,可将d-q坐标系转换到ABC三相静止坐标系。将图4-图6以及dq-ABC坐标变换模型结合到一起,即可得到PMSM的仿真模型。
2.2 SPWM逆变仿真模型
依据SPMM双极性控制的原理,建立的三相电压源型SPWM逆变器仿真模型如图7所示。逆变器采用全控型高速开关器件IGBT管,调频和调压均由逆变器完成。由PWM Generator模块提供驱动信号,在该模块中,设置调制波为正弦波,即进行的是SPWM调制。正弦波和三角波进行比较以后,经过Relay继电器输出三相SPWM波,利用Demux模块将其分解为三个独立的信号,通过示波器观测到仿真结果。
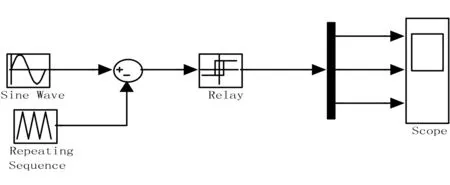
图7 SPWM仿真模型Fig.7 SPWM simulation model
2.3 SPWM矢量控制系统仿真模型
依据前述分析,建立系统的仿真模型如图8所示。仿真模型中,Permanent Magnet Synchronous Machine 为控制对象,模拟车用正弦波永磁同步电动机;PMSM的转速,电流、转角和电磁转矩等信号都取自永磁同步电机向量分解器;汽车蓄电池用直流模块DC模拟;通用桥Universal Brige模拟三相逆变桥;模型中放大器Gain1用于调整dq-abc模块输出的三相调制信号的幅值,Gain2用于调整定子三相电流反馈信号的幅值,Gain3设定为PMSM极对数;abc-dq及dq-abc为3s/2r变换及反变换仿真模块;PWM Generator为SPWM仿真模块;ACR-d,ACR-q为d-q轴励磁电流及转矩电流PI调节器模块,实现常规比列积分调节。
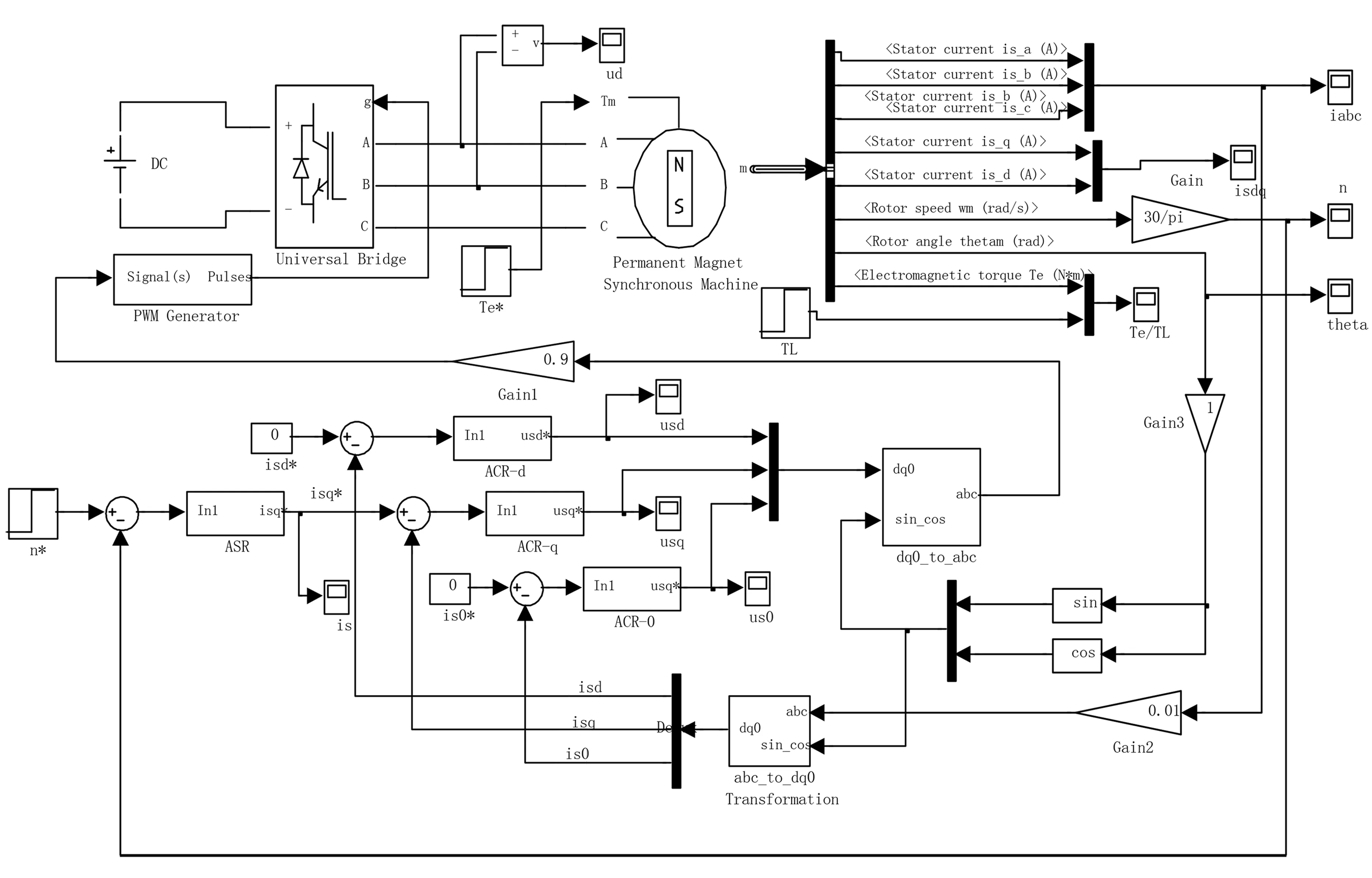
图8 永磁电机SPWM矢量控制系统仿真模型Fig.8 Simulation model of SPWM vector control system based on PMSM
4 仿真结果及分析
在Matlab/Simulink仿真模型中,设置PMSM电机参数和PI调节器参数,选用定步长ode3算法,给定转速为n=2500r/min,0-0.015s,PMSM的负载转矩为0,0.05后负载转矩为4N·m,0.15s时给定转速降为1000r/min。运行图8仿真模型,得到图9转速仿真波形及图10的SPWM仿真波形。由图9速度仿真波形可知,0-0.015s,PMSM空载起动,0.015s时达到给定转速,动态响应快,0.05s加载4N·m,转速略有波动,但仍保持给定转速2500r/min,PMSM表现出较强的抗干扰能力,在0.15s时将转速给定调整为1000r/min,PMSM转速迅速下降并稳定在1000r/min,PMSM表现出较好的带载转速跟踪性能。

图9 PMSM转速仿真波形Fig.9 PMSM simulation waveform
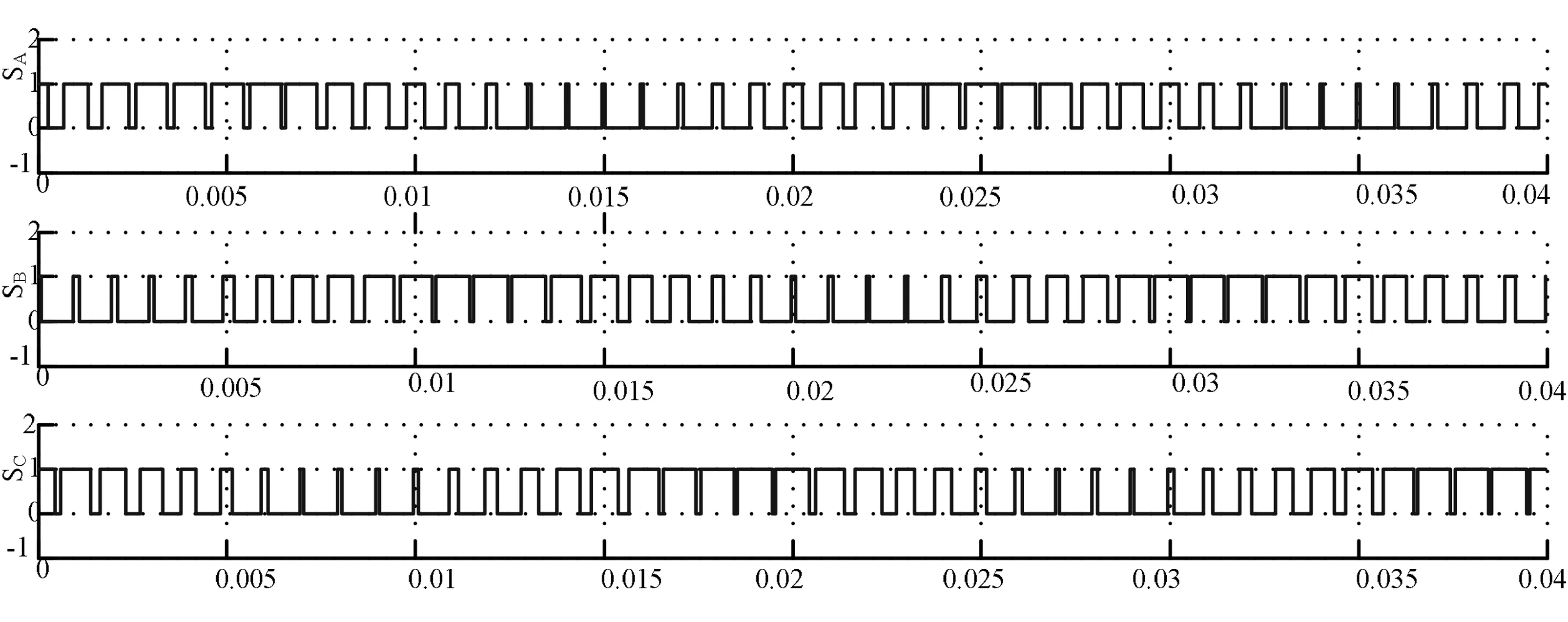
图10 SPWM仿真波形Fig.10 Simulation waveform of SPWM
图10是图7永磁同步电机SPWM矢量控制系统仿真模型中PWM Generator仿真模块在0-0.04s时的仿真波形,由仿真模型可以看出,是一系列幅度相等,脉冲宽度按正弦规律变化的正弦波,较好的验证了SPWM控制的原理及仿真模块的正确性。
5 结论
文中分析了车用永磁同步电机SPWM矢量控制系统的原理,并分别建立了各个模块的仿真模型,最后建立了系统仿真模型并进行了仿真,仿真波形表明系统有较好的动稳态性能,有较好的速度跟踪及抗干扰能力,说明系统SPWM控制及矢量控制的正确性和有效性,表明仿真模型可靠,为车用PMSM系统高性能控制策略的验证及半实物仿真平台及DSP实验系统奠定了基础,在工程上有一定的实用价值。
[1]陆婋泉,林鹤云,韩俊林.永磁同步电机的扰动观测器无位置传感器控制[J].中 国 电 机 工 程 学 报,2016,36(05):1387-1394.
[2]沈辉,张希.电动汽车牵引电机新型控制系统的设计研究[J].电气传动,2015,45(03):3-6,28.
[3]邱鑫,黄文新,卜飞飞,等.电动汽车用IPMSM直接转矩控制系统效率优化[J].电 工 技 术 学 报,2015,30(22):42-48.
[4]赵长辉,卢黎波,陈立玮,等.飞机的电动力系统技术概述[J].航空工程进展,2011,2(04):449-458.
[5]郭嘉成,王森,赵阳阳,等.电动飞机主推进永磁同步电机强度分析[J].沈阳工程学院学报(自然科学版),2016,12(04):328-331.
[6]黄俊,杨凤田.新能源电动飞机发展与挑战[J].航空学报,2016,37(01):57-68.
[7]尹常琦.欧洲EADS全电飞机Cri-Cri[EB/OL].(2010-9-7)[2015-08-20].http ://news.xinhuanet.com/mil/2010-09/07/content_14143775.htm.
[8]王兆安,刘进军.电力电子技术[M].北京:机械工业出版社,2015.
[9]阮毅,陈伯时.运动控制系统[M].北京:机械工业出版社,2015.
[10]林立,唐杰,刘家芳,等.Simplorer在电力电子技术教学改革中的应用[J].中国电力教育,2011,(18):169-170,18.
