双转向器合流式全液压转向系统特性分析
2018-03-05刘志怀
苏 晨 ,刘志怀
(1.河南工学院 汽车工程系,河南 新乡 453003;2.哈密豫新能源产业研究院有限责任公司,新疆 哈密 839001;3.河南理工大学,河南 焦作 454150)
1 引言
流量放大全液压转向系统具有负载敏感转向的功能,随着负载传感流量放大全液压转向器的使用范围越来越广,所以有必要对负载传感全液压转向系统静、动态性能做全面的研究[1]。而在更大吨位的工程机械中,原有的流量放大全液压系统设计中,遇到了转向器选型困难的问题,需要探索更大排量转向液压系统方案,因此我们还提出了一种双转向器合流方案。国内外学者取得一定成果:文献[2]基于OSQA型流量放大器的结构设计一种用于大型工程机械的全液压转向系统,解决了大型工程机械操作困难的问题;文献[3]针对全液压转向系统进行了分析,从能量流的角度建立转向器和转向系统的动态模型;文献[4]采用AMESim和ADAMS协同仿真的方法,对汽车用液压助力转向系统进行了仿真研究。
针对现有流量放大全液压系统的结构特点,此类系统在超大吨位工程机械应用中极有可能出现不能转向或者转向发沉的问题,为了解决这个问题和使流量放大大全液压转向系统能够应用到更大吨位自卸汽车上,提出一种方案:双转向器合流方案,即选用排量较小的两组全液压转向器OSPBX LS控制一个流量放大器OSQB合流工作,采用试验和建模仿真相结合的办法对新系统的特性进行分析,以验证此方案的可行性。
2 液压转向系统设计
2.1 全液压转向系统原理分析
全液压转向系统,系统液压原理图,如图1所示。
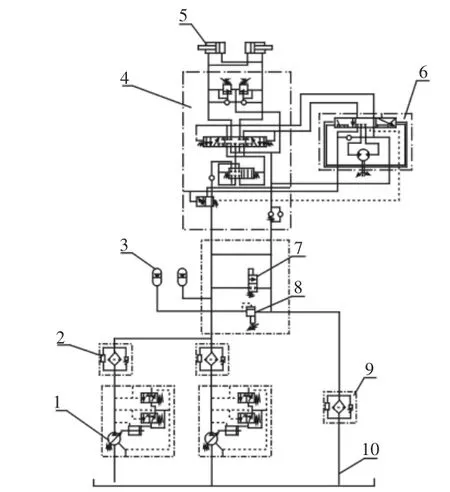
图1 全液压转向系统原理图Fig.1 Schematic Diagram of Full Hydraulic Steering System
2.2 转向液压系统参数设计
(1)转向阻力矩
根据转向阻力矩计算相关公式可得[5]:

式中:B—转向轮宽度,mm;μs—轮胎与地面摩擦系数;e—转向轮摆动半径,mm;Gs—转向桥负荷,N;k—超载系数。
(2)转向液压缸的最大推力:FSmax=TL/rmin(2)
式中:rmin—最小转向阻力臂,mm。
(3)转向液压缸的面积
(4)全液压转向器计算
转向液压缸的工作容积[6]:
(5)蓄能器计算选型
式中:ps1—转向系统最高工作压力,MPa;必须综合考虑该值,太大会增大系统压力损失,太小会增大蓄能器容积;ps0—蓄能器的充气压力,MPa;n—多变系数,n=1~1.4[7]。
(6)转向泵计算选型
转向器需要转向泵供给的额定流量按下式计算:

式中:nSU—转向器转速,发动机怠速工况下,转向器转速可取最小值,r/min。

式中:iep—发动机与转向泵的传动比;nengmin—发动机怠速转速,r/min;ηSPV—转向泵的容积效率。
由于是恒压变量泵补油、蓄能器供油,并且采用了分动箱带动两个转向泵,所以转向泵排量可以适当减小[8-9]。
选择的最大排量组合为:全液压转向器型号OSPLX520LS,流量放大器型号OSQB8。此时,方向盘转动圈数m=6.9,转向系统的最高压力已经接近25MPa,在某些工况下,系统极有可能出现不能转向或者转向发沉的问题,这种情况对于系统的安全性和操作性都是很难接受的,使得转向系统的性能需要进一步改善[10]。
为了解决这个问题和使流量放大大全液压转向系统能够应用到更大吨位自卸汽车上,我们提出了一种方案:双转向器合流方案,即选用排量较小的两组全液压转向器OSPBXLS控制一个流量放大器OSQB合流工作[11],如2×OSPBX400LS与OSQB8组合,该系统的排量可以很大,上述问题得以解决,系统原理,如图2所示。
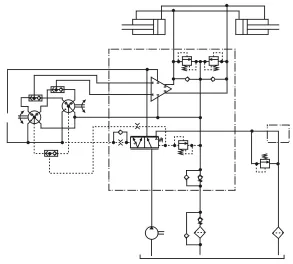
图2 转向器合流控制原理图Fig.2 Schematic Diagram of the Confluence of the Steering Gear
3 双转向器系统特性分析
本节模型的搭建也选用了转向器和流量放大器的超级元件,以便图形更加简洁[12-13]。为了模型与系统原理更好的对应及图形简化,将流量放大器、转向器和等效的模型封装为超级元件形式。

图3 系统特性曲线Fig.3 System Characteristic Curve
为了验证双转向器方案的可行性,现令方向盘转角θ输入斜坡信号,如图 3(a)所示。使方向盘转速降低一半[14]。由图 3(b)可以知道,由于采用了双转向器,输入到转向油缸的油量基本保持不变,这说明转向盘转动圈数降低一半,但是流入转向油缸的油液流量基本维持不变,也就是说可以得到更大输出流量的全液压转向系统。但是图3(d)~图3(f)均反映出系统响应时间变长。下面将分析转向负载和入口流量变化对系统响应的影响,通过得到的结果,可以更好的了解双转向器流量放大全液压转向系统是否具有可行性[15]。
3.1 转向负载变化对系统响应影响
改变转向负载,分析其对系统响应的影响。
方向盘转角输入斜坡信号,由图可知当转向器开口一定时,其流量不会随着负载的改变而变化,这证实了转向器的流量与负载无关。转向负载变化对系统响应的影响与单转向器模型相比具有相同的规律,这说明了双转向器系统流量依然与负载无关。但是在开始的短暂时间内,系统产生了不同的震荡,并且响应时间增长。
3.2 入口流量变化对系统响应的影响
方向盘转角输入斜坡信号,改变泵的转速分析入口流量变化对系统响应的影响,结果如图4所示。
由图可见,入口流量变化对系统响应的影响与单转向器模型相比具有相同的规律,但是在开始的短暂时间内,转向缸工作压力及转向缸输入流量产生了不同的波动,但是系统的响应时间略有延迟。由此可见,双转向器系统流量与入口流量变无关。
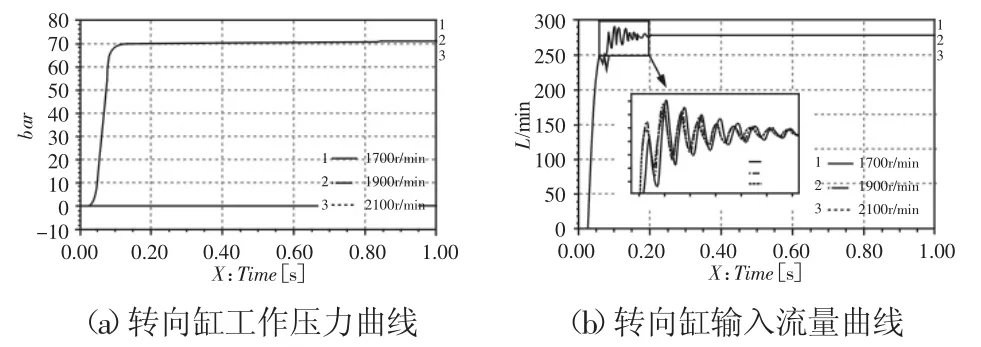
图4 入口流量系统特性影响Fig.4 Impact of Inlet Flow System Characteristics
根据上述分析可以知道使用双转向器的模型在方向盘转角输入斜坡信号时,各参数均趋于稳定。通过分析,影响双转向器系统性能的因素主要还是方向盘的转速和负载。从而说明负荷传感转向系统具有很好的性能,其能保证转向系统的流量不受发动机转速和负载的影响。
综上所述,双转向器系统是一个稳定的系统,其具有单转向器系统的所有特性。但是与单转向器系统相比,动态响应时间较长。当系统流量大于流量放大器允许最大流量时,系统还可增加一个流量放大器,即构成了双转向器+双流量放大器的系统。
4 系统特性试验分析
研究液压系统动态性能的过程中,试验测试工作是不可缺少的。双转向器合流式流量放大全液压转向系统试验平台总体结构图,如图5所示。在预先确定出的测点布置传感器,连接测试仪器,核查测试系统。具体测点布置情况,如表1所示。

图5 试验平台总体结构图Fig.5 The Overall Structure of the Test Platform

表1 转向液压系统试验测点Tab.1 Steering Hydraulic System Test Points
方向盘输入近似角速度阶跃信号,如图6(a)所示。由图可知,通过分析结果可知,负荷传感转向系统具有很好的性能,其能保证转向系统的流量不受发动机转速和负载的影响,验证了双转向器全液压转向系统方案的可行性,同时表明理论分析和模型仿真的准确性,为实车试验提供参考。
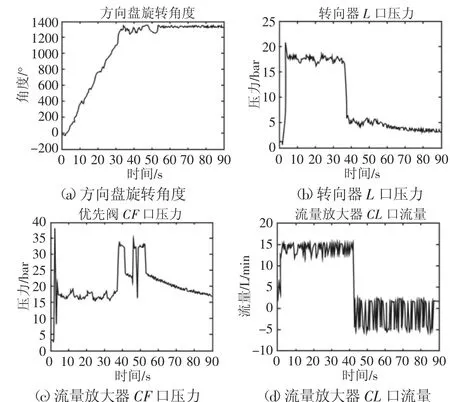
图6 试验分析结果Fig.6 Test Results
5 结论
基于流量放大全液压转向系统的特点,大吨位自卸车上极有可能出现不能转向或者转向发沉的问题,提出一种双转向器合流方案,并采用模型和试验相结合的方法对其特性进行分析,结果可知:(1)双转向器合流方案,选用排量较小的两组全液压转向器OSPBX LS控制一个流量放大器OSQB合流工作,该方案采用蓄能器供油,恒压变量泵补油,大幅度的提高了系统的效率。(2)分析了影响转向系统性能的因素,主要是方向盘的转速和负载。从而说明负荷传感转向系统具有很好的性能,其能保证转向系统的流量不受发动机转速和负载的影响(3)试验分析结果表明双转向器合流方案的可行性,同时表明理论分析和模型分析的准确性,为实车试验提供参考。
[1]Ren S Z,Cao X L.Full hydraulic steering system used in large-scale engineering machinery[J].Road Machinery&Construction Mechanization,2006,38(5):125-136.
[2]Yong J.The dynamic characteristic analysis of full hydraulic steering system in large mining truck[J].Applied Mechanics&Materials,2013(433-435):59-62.
[3]Gajda A,Adamiec J,Krawiec P.Analysis of the kinematic characteristic of the test stand for various steering systems for the hydraulic driven working attachment[J].Procedia Engineering,2016,136(4):3-7.
[4]Regueiro L,Lema J M,Carballa M.Key microbial communities steering the functioning of anaerobic digesters during hydraulic and organic overloa-ding shocks[J].Bioresource Technology,2015,66(3):197-208.
[5]戴正阳.基于AMESim矿用自卸车全液压转向系统建模分析[J].机床与液压,2016,44(19):158-163.(Dai Zheng-yang.Modeling and analysis on full-hydraulic steering system of mining dump truck based on AMESim[J].Machine Tool&Hydraulics,2016,44(19):158-163.)
[6]姜立标,翟伟良,程铖.载质量220t电动轮自卸车全液压转向系统设计[J].机床与液压,2014(4):38-43.(Jiang Li-biao,Zhai Wei-liang,Cheng Yu.Design of full hydraulic system of 220t load motor dump truck [J].Machine Tool&Hydraulics,2014(4):38-43.)
[7]王同建,陈晋市,赵锋.全液压转向系统机液联合仿真及试验[J].吉林大学学报:工学版,2013,43(3):607-612.(Wang Tong-jian,Chen Jian-shi,Zhao Feng.Mechanical-hydraulic cosimulation and experiment of full hydraulic steering systems[J].Journal of Jilin University:Engineering and Technology Edition,2013,43(3):607-612.)
[8]侯友山,石博强,谷捷.负荷传感转向液压系统优先阀的稳健设计[J].农业工程学报,2010,26(10):129-133.(Hou You-shan,Shi Bo-qiang,Gu Jie.Robust design of priority valve in load sensing hydraulic steering system [J].Transactions of the Chinese Society of Agricultural Engineering:Transactions of the CSAE,2010,26(10):129-133.)
[9]杨务滋,王昌平,黄亚光.矿用自卸车流量放大器AMESim建模与特性研究[J].武汉理工大学学报:交通科学与工程版,2013,37(2):287-291.(Yang Wu-zi,Wang Chang-ping,Huang Ya-guang.Modeling and simulation of mining truck flow amplifier based on AMESim[J].Journal of Wuhan University of Technology:Transportation Science&Engineering,2013,37(2):287-291.)
[10]薛飞,徐宝富,陆敏恂.流量放大阀在全液压转向系统中的应用[J].流体传动与控制,2005(5):16-17.(Xue Fei,Xu Bao-fu,Lu Min-xun.The application of flow control valve in hydraulic steering systems[J].Fluid Power Transmission and Control,2005(5):16-17.)
[11]李琳娜,刘英林.铲运机全液压转向系统机液联合仿真及优化设计[J].机械设计与制造,2016(10):18-21.(Li Lin-na,Liu Ying-lin.Mechanical-hydraulic co-simulation of full hydraulic steering system and optimal design of scraper[J].Machinery Design&Manufacture,2016(10):18-21.)
[12]贺海洋,李建朝.基于AMESim的全液压转向系统的仿真分析[J].农业装备与车辆工程,2011(10):36-39.(He Hai-yang,Li Jian-chao.Simulation and analysis of the whole hydraulic steering system based on AMESim[J].Agricultural Equipment&Vehicle Engineering,2011(10):36-39.)
[13]葛振亮,侯友山,姜勇.工程车辆全液压转向系统管路特性分析[J].振动与冲击,2011,30(3):60-63.(Ge Zhen-liang,Hou You-shan,Jiang Yong.Dynamic characteristics analysis of hydraulic pipes in fully hydraulic steering system of engineering vehicles[J].Journal of Vibration and Shock,2011,30(3):60-63.)
[14]Tang B,Jiang H B,Zhe X U.Dynamics of electromagnetic slip coupling for hydraulic power steering application and its energy-saving characteristics[J].Journal of Zhongnan University:The English version,2015,22(5):1994-2000.
[15]方桂花,常福,司润霞.工程车辆转向系统动态特性研究[J].机械设计与制造,2016(2):91-93.(Fang Gui-hua,Chang Fu,Si Run-xia.The analysis of dynamic characteristic of vehicles steering system[J].Machinery Design&Manufacture,2016(2):91-93.)
