单晶硅化学机械抛光的PLC控制系统设计
2018-03-03王昆曲庆韬
王昆 曲庆韬
摘要:为了完成单晶硅的化学机械抛光,本文提出了一种单晶硅化学机械抛光设备的控制系统设计方法。该控制系统以西门子的PLC S7-200为核心,实现控制单相交流电机的旋转运动和步进电机水平往复周期性运动,实现对不同尺寸的单晶硅晶片设置合适的运动参数,可以得到高表面质量的表面。并针对特定尺寸的单晶硅晶片进行抛光实验,得到满足粗糙度要求的表面。
关键词:单晶硅;化学机械抛光;西门子PLC S7-200
中图分类号:TN305 文献标识码:A 文章编号:1007-9416(2018)11-0007-02
1 概述
单晶硅是半导体,其光学、机械及化学性能优异。在常温下(300 K)硅的电阻率为 2.3×105Ω·cm,硅禁带宽度为1.1ev;折射系数和反射率都很高;化学性质稳定,不溶于酸,但易溶于氟化氢和硝酸的混合液。既广泛用于制作芯片和光学元器件,也广泛应用在太阳能电池和探测器上[1],有巨大的市场空间和前景,这对获得高表面质量的单晶硅提出了迫切要求。
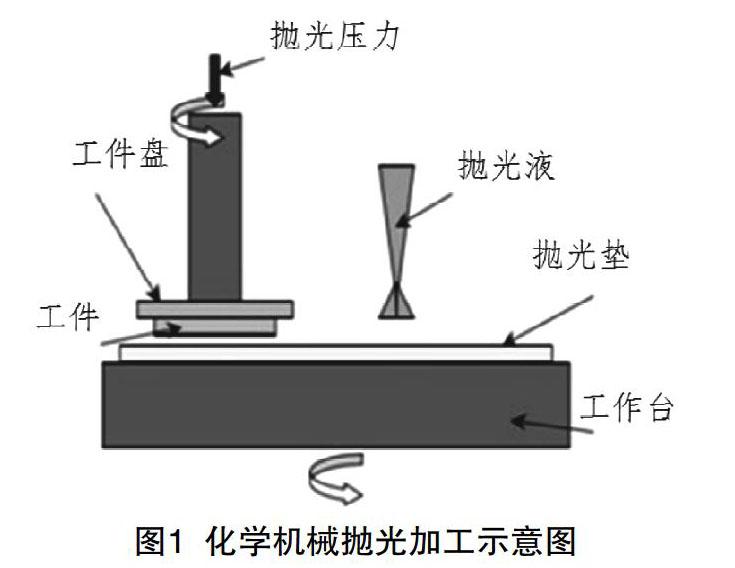
在我国50年代,随着光学玻璃制品的深加工,化学机械抛光技术也开始发展起来,化学机械抛光作为唯一的全局平坦化抛光技术,经过几十年的发展,目前已被广泛应用于各类芯片和光学晶体的超精密加工中,其加工示意图如图1所示。首先,通过化学氧化反应削弱材料原子分子之间的键能,形成一个全新的氧化分子层,再通过机械摩擦去除经氧化的表面软化层材料,流动的抛光液冲走脱落的材料[2]。
本文在继承开放式表面恒压化学机械抛光技术的基础上,基于西门子的PLC S7-200,設计了化学机械抛光控制系统,其可以根据不同尺寸的单晶硅晶片设计合适的运动参数,得到高表面质量的表面。
2 控制系统硬件设计
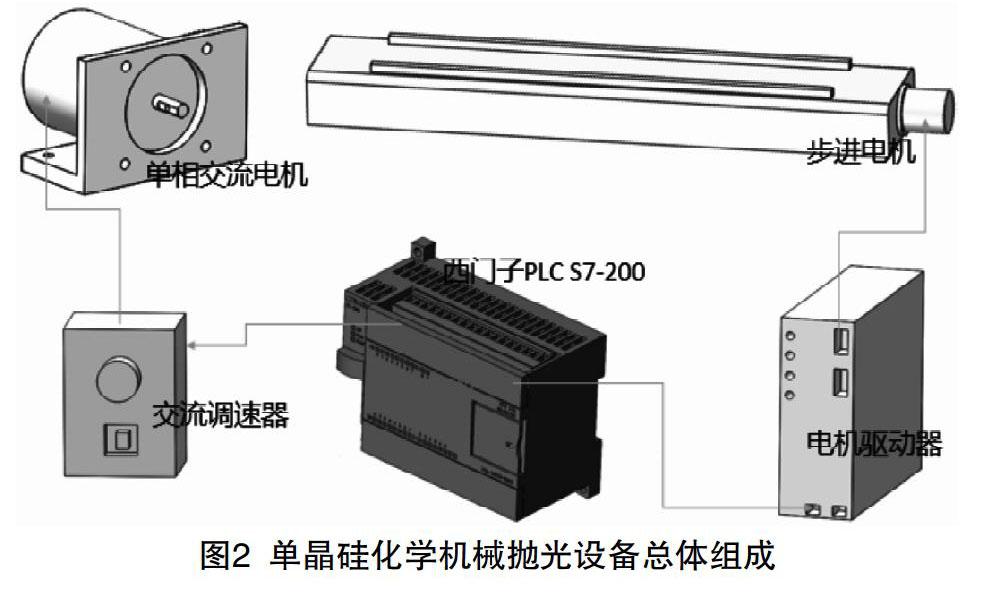
单晶硅化学机械抛光设备总体由旋转运动设备和水平往复运动设备组成,如图2所示。控制系统硬件由以下部分组成:
(1)西门子PLC S7-200;(2)步进电机;(3)电机驱动器;(4)交流调速器;(5)单相交流电机(带刹车);(6)+24V直流电源。
旋转运动设备由PLC控制单相交流电机的周期性启停和正反转运动来实现,转速由交流调速器控制,控制模式为开环控制。水平往复运动设备由PLC控制步进电机的周期性往返运动和转速来实现,通过设置限位开关,对运动距离进行限定,控制模式为开环控制。其中电机驱动器提供两种不同的控制信号:正脉冲/负脉冲、脉冲+方向。
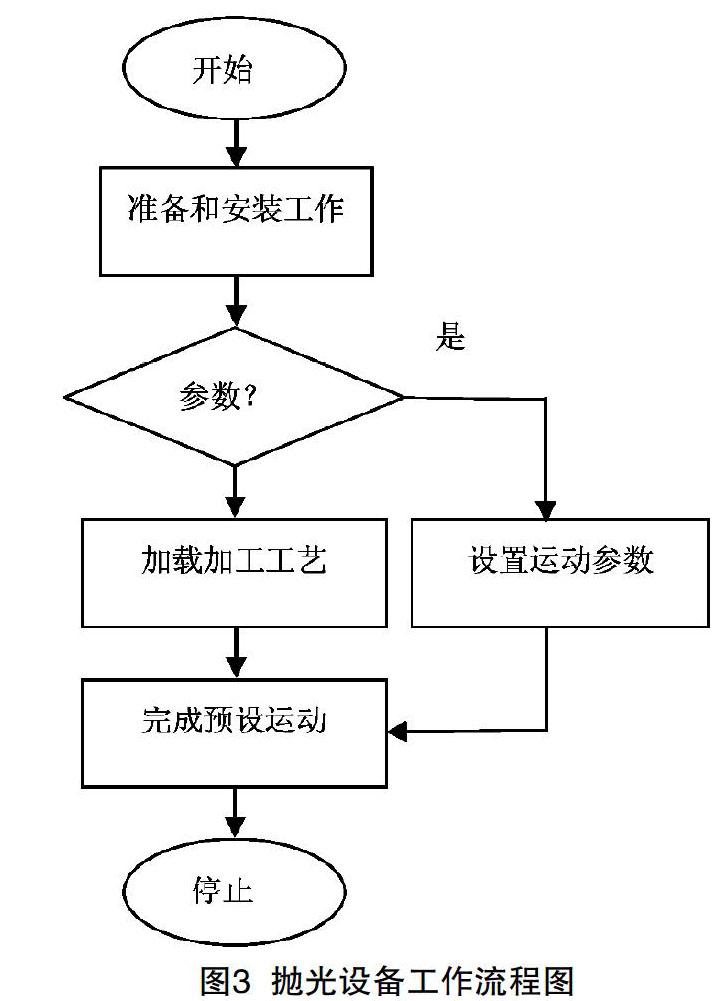
其抛光工作流程如图3所示。首先安装好抛光板和单晶硅待抛件,经过百分表定位后,调节换向阀和调压阀加压将单晶硅待抛件压在抛光板表面,滴加抛光液润湿接触面,完成准备和安装工作;随后根据实际的抛光参数设定单相交流电机和步进电机的运动速度等运动参数;同时启动单相交流电机和步进电机,单相交流电机带动抛光板按设定的运动方式旋转,实现旋转运动;步进电机带动平移台按设定的速度、运动距离和往返次数做周期性往复运动,实现水平往复运动,完成单晶硅的化学机械抛光。
3 控制系统软件设计
在保证自动化的前提下,控制好抛光板和工件的运动速度、运动轨迹对抛光出符合粗糙度要求的表面至关重要。
首先,采用PLC完成对单相交流电机旋转运动的控制,其中包括启停和正反转运动。要实现对单相电动机的正反转控制,只需改变电源在电机内电容两侧的接入位置,将PLC的两个数字量输出口通过中间继电器与交流调速器的正反转端子连接。为了防止电机正反转同时接通而烧毁电机,还要增加互锁保护功能,当电机正向启动时,可以增加按钮互锁或者线圈互锁功能,保证电机无法反向转动,反向启动类似。同时可以根据实际使用情况添加定时器和计数指令[3],控制电机按照运动要求周期性正反转与启停。
其次,采用PLC完成对步进电机周期性水平往复运动的控制,需要使用西门子的EM235模块,根据模块说明书要求完成与电机驱动器的模板接线,通过STEP7-Micro/Win SP9软件的“位置控制向导”配置工具,在离线的情况下,完成定位模块EM253的运动参数、运动轨迹包络等设置[4]。
配置控制步进电机的脉冲输出极性、控制方向,其中系统的测量单位选择“使用相对脉冲数”;方向控制既可以选择“使用P0输出正向运动脉冲;使用P1输出负向运动脉冲。”也可选择“使用P0输出双向运动脉冲;使用P1指明运动方向。P1有效为正向运动;P1无效为负向运动。”;根据实际使用情况定义电机的速度,包括最大速度、最低速度和启动/停止速度;设置运动轨迹包络和数量。其次应用“POSx_CTRL”命令编制程序,使用SM0.0接通参数“EN”、“MOD_EN”,使每一个循环都执行。然后将程序块、数据块、系统块下载到S7-200 CPU中,进入EM 253控制面板中进行调试,在此界面中手动操作寻找机械设备的参考点,调用、调试或者修改预定义的运动轨迹包络,如图4所示。根据实际抛光需求,编制程序,下载到S7-200 PLC,调试运行。
4 实验结果
本文以56mm×45mm×6mm的单晶硅晶片为例,根据计算出的抛光运动轨迹,推算出相应的步进电机和单相交流电机的运动参数。其中方向控制选择“使用P0输出正向运动脉冲;使用P1输出负向运动脉冲。”步进电机最大运动速度为脉冲217600脉冲/s,最低速度为20脉冲/s,加减速时间设置为100ms,往复周期设置为300次;单相交流电机转速设置为37r/min,30次往返运动切换正反转,其中停止时间忽略不计。进行抛光实验后得到表面粗糙度达到0.927nm。
5 结语
本文应用西门子PLC S7-200分别控制单相交流电机完成旋转运动和步进电机完成水平往复周期性运动。针对不同的实际抛光参数设定合理的运动参数,可以得到符合粗糙度要求的单晶硅表面,并针对特定尺寸单晶硅晶片进行抛光实验,得到表面粗糙度为0.927nm的表面,满足表面粗糙度要求。
參考文献
[1]张文爽.单晶硅精密研抛的分子动力学仿真及试验研究[D].吉林大学,2013.
[2]王永光.基于分子量级的化学机械抛光材料去除机理的理论和试验研究[D].无锡:江南大学,2008.
[3]西门子(中国)有限公司.SIMATC S7-200可编程控制器系统手册[M].2008.
[4]西门子(中国)有限公司.定位模块EM253快速入门[M].2010:2-3.
The Design of PLC Control System for Monocrystalline Silicon
Chemical Mechanical Polishing
WANG Kun, QU Qing-tao
(College of Mechanical Engineering, Tongji University, Shanghai 201804)
Abstract:In order to complete monocrystalline silicon chemical mechanical polishing, a control system of chemical mechanical polishing equipment for monocrystalline silicon was proposed. T- he control system was based on siemens PLC S7-200. It could control the rotational motions of m-otors and the periodic horizontal reciprocating motion of stepper motor, set appropriate motion pa-rameters for different monocrystalline silicon wafers, and obtain surfaces with high qualities. The polishing experiments for the monocrystalline silicon wafers with specific size were carried out, and the surfaces which met the roughness requirements were obtained.
Key words:monocrystalline silicon; chemical mechanical polishing; siemens PLC S7-200
