基于D-S推理算法的智能车辆轨迹预测研究
2018-03-01黄建根陈祯福裴晓飞董兴智
黄建根,陈祯福,裴晓飞,董兴智,张 杰
(1.万向集团公司,杭州 311215;2.武汉理工大学 汽车工程学院,武汉 430070)
轨迹预测技术在智能汽车的研究中占有重要地位[1]。例如,在自动换道或超车控制算法中,需要对侧后方车辆或前车在未来一定时间内的运动轨迹进行有效预测,智能汽车才能做出正确的决策。此外,轨迹预测也是智能汽车进行可行域判断的基础。
在汽车的轨迹预测中,常用的汽车运动模型主要有4种:恒车速(Constant Velocity,CV)模型、恒加速度(Constant Acceleration,CA)模型、恒转角(Constant Turn Rate,CTR)模型、恒转角恒切向加速度(Constant Turn Rate and Acceleration,CTRA)模型[2]。CV模型将速度看作常数,将短时间内汽车的运动简化为匀速直线运动。CA模型是在CV模型的基础上,考虑汽车加速度的变化。CTR模型不仅考虑汽车的纵向运动,还考虑了横向运动,即假设汽车在转向工况下按照某一确定的半径做匀速圆周运动。CTRA模型是最常用的汽车运动模型,是在CTR模型的基础上,考虑汽车速度的变化,将汽车的加速度以及横摆角速度看作定值。
传统的路径预测多采用单一的运动模型,不同的运动模型取得的轨迹预测效果不同。但是汽车实际行驶过程是一个多维度运动,这就导致任意单一的运动模型都很难准确地描述汽车在任意时刻的运动状态。国内外很多文献针对如何获取最优的轨迹预测结果进行了研究。POLYCHRONOPOULOS 等[3]提出一种分层结构的数据融合算法,用于自适应巡航系统与前撞预警系统的轨迹预测。充分利用各种运动模型的优点设计了多模型切换的预测算法,试验表明该方法相对于直接利用单一的运动模型具有较高的预测准确度,但是文中的模型决策取决于不同传感器的门限值,在实车传感器噪声大、信号易受干扰的情况下,门限值附近的判断结果会存在偏差。ADAM等[4]为了解决单一运动模型带来的短期预测精度过低的问题,提出一种基于运动模型与轨迹模型的路径预测算法。根据运动曲率连续原理,将汽车的运行轨迹采用多项式表达,求解历史轨迹的多项式模型,进而推算汽车将来的行驶轨迹,并采用自适应权值分配的方法与运动模型的预测结果进行融合,得到最优的轨迹预测。PANAGIOTIS等[5]提出一种基于无线通信的协同轨迹预测算法。该轨迹预测算法分为两部分:第一部分为基于车辆动力学的短期轨迹预测,第二部分为基于道路曲率的长期轨迹预测。最终试验表明,该算法能获得较好的汽车长期轨迹预测效果,但是其短期轨迹预测由于采用固定的运动模型而存在一定的精度误差。邵清波[6]提出一种考虑道路纵向坡度的汽车轨迹预测算法,建立了适用于纵向坡度工况的汽车运动模型,并在轨迹预测中采用当前的最优坡度进行修正。
本研究在车辆轨迹预测过程中,融合D-S证据推理对4种运动模型进行合理决策。首先介绍了D-S证据推理的基本原理,然后研究了采用D-S推理算法进行轨迹预测的实现方法,构造了不同传感器的基本概率分配函数。最后设计实车试验,通过试验数据对所提出的汽车轨迹预测算法进行验证。
1 D-S推理算法
1.1 基本概念
D-S证据推理运用集合的方式来描述不确定性命题的全部穷举类型,将某一不确定性命题结果全部穷举组成集合,该集合称为D-S证据推理的辨识框架,用Θ表示,Θ内的元素包含了对命题认识的所有可能性并且互斥[7]。

式中:θi为识别框架Θ中的事件或者元素;n为元素个数,i =1, 2,…,n 。利用辨识框架Θ上的子集构成新的集合2Θ,称为Θ的幂集,可表示为:

式中:{φ,为空集;{θiU θj中 i≠ j,{θ为不确定集。
D-S证据推理利用辨识框架将系统的命题转换为集合的表示形式,将命题之间的逻辑关系转换为集合子集之间的运算关系。此外,需要建立证据对某一事件的基本概率分配函数,用符号m表示。对于任意属于幂集2Θ的命题A,其基本概率分配函数m可以定义为m:2Θ→[0 , 1]且:

式中:m( A)反映了证据对A命题成立的支持程度。
1.2 合成规则
假设在同一辨识框架Θ上对不同证据依据某种规则建立基本概率分配函数,分别表示为m1, m2,…,mn,若这些证据对不同命题的支持相互独立,则可以利用D-S证据合成公式对其进行合成,得出一个合成后的基本概率分配函数m,m表示为:

式中:m为m1, m2,…,mn的直和,是n个不同证据对同一命题的成立的基本概率分配函数。
Dempster合成公式是D-S证据推理中最基本的合成公式,Dempster合成公式的基本形式为:
式中:{φ,为空集;K可表示为:

1.3 判决规则
D-S证据推理的判决准则与基本概率分配函数一样没有统一的定义,一般会根据具体的问题选择不同的判决方法。这里介绍一种基于规则的判决方法,其判决结果需要满足:(1)判决结果应取得最大的概率分配。(2)判决结果的概率分配数值应超过其它目标类型的概率分配数值一定范围。(3)表示不确定子集的概率分配函数数值m(θ)在一定门限内。(4)判决结果概率分配函数值超过一定门限。
其中,上述规则中的门限值可由训练数据得到。基于规则的判决方法的数学公式表达形式如下。
存在A1、A2属于辨识框架Θ,并且满足:

若
式中:A1为判决结果;ε1、ε2为门限值。
1.4 典型应用
D-S证据推理可应用于多传感器信息融合中,结构框图如图1所示。信息融合的过程可分为3步:(1)建立系统的辨识框架,构造各个传感器对辨识框架内元素的基本概率分配函数并分别计算求解。(2)利用D-S证据推理合成公式,综合不同传感器对辨识框架不同元素的基本概率分配函数。(3)利用选定的判决规则,选择最大支持程度的目标情形。

图1 基于D-S证据理论的信息融合结构框图
2 车辆轨迹预测
2.1 总体结构
汽车轨迹预测算法可看作以上D-S信合融合架构的具体实现。根据不同车载传感器的输入信息和选定的判断规则,D-S证据推理算法将输出当前轨迹预测周期内的最佳汽车运动模型。
系统的辨识框架中包含了4种汽车运动模型,辨识框架Θ可以表示为:

式中的CV模型被当做加速度为0时CA模型的特例,因此辨识框架同样可以简化为:

在D-S证据推理预测过程中,选用加速度与横摆角速度传感器差分信息作为D-S证据理论算法的输入,再以此作为D-S证据推理的证据,并对最终模型的选择起着决定性作用。纵向加速度的大小表征了汽车纵向的运动趋势,用以区分CTR模型与CA模型、CTRA模型;横摆角速度信号的差分值可以反映汽车横向的运动趋势,以此判别CA模型与CTR模型、CTRA模型。用于轨迹预测的D-S证据推理系统框架如图2所示。
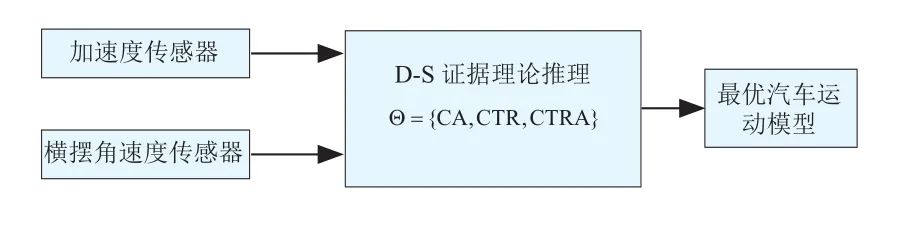
图2 轨迹预测算法的D-S证据推理框图
2.2 概率分配函数
在轨迹预测算法中,需考虑不同传感器信息对相应运动模型的贡献度,再参考文献[8]中的方法,构造不同传感器的基本概率分配函数。当加速度传感器的观测值大于某一值a0且与a0的差值越大时,汽车的纵向加速度运动趋势明显,运动模型为CA模型和CTRA模型的可能性越大,可以认为呈线性分布,CA模型与CTRA模型的基本可信度相同;当加速度传感器的观测值小于a0且更接近于0时,汽车纵向的加速运动趋势越弱,运动模型为CTR模型和CV模型的可能性越大。设定在检验门限值处各运动模型的基本概率分配函数均为0.5。因此,加速度传感器对辨识框架中各运动模型的基本概率分配函数为:
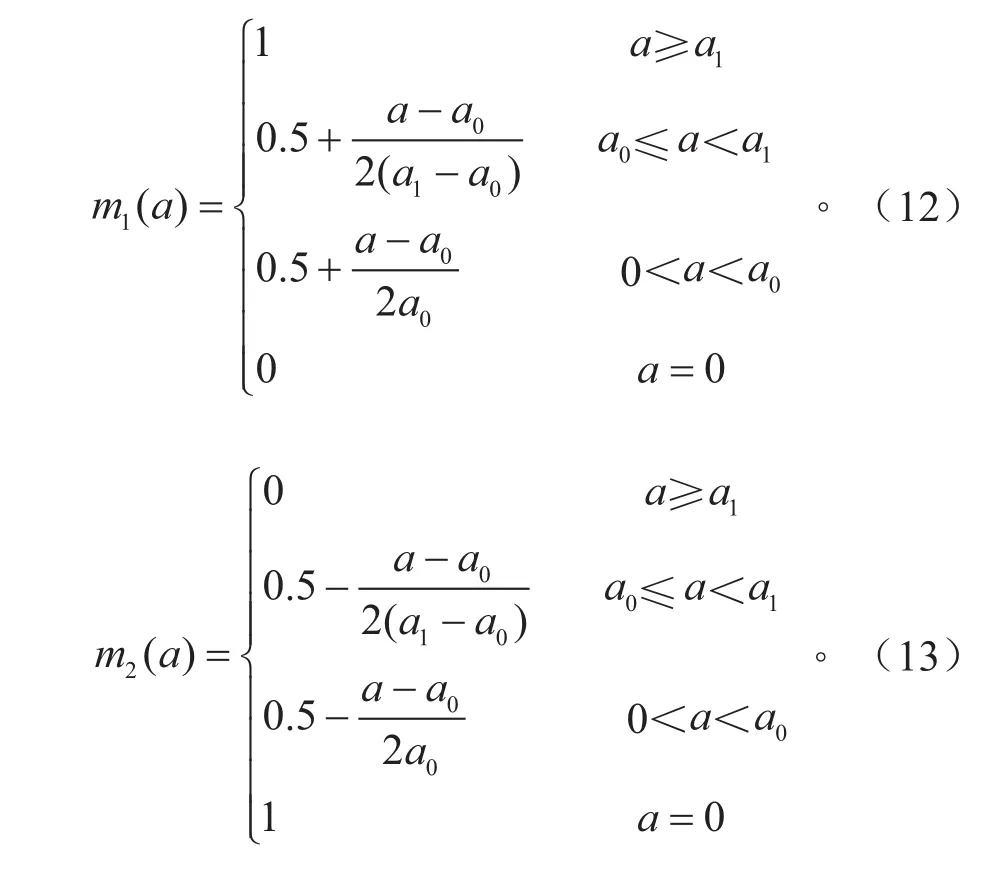
式中:m1(a)为加速度对CA模型与CTRA模型的基本概率分配函数计算公式;m2(a)为加速度对CV模型与CTR模型的基本概率分配计算公式;a0与a1的值通过试验获得。
与上述内容相似,当横摆角速度传感器观测值的导数大于某一值0且与的差值越大时,汽车的横向转向运动趋势越明显,运动模型为CTR模型与CTRA模型的可能性越大,可以认为呈线性分布,CTR模型与CTRA模型的可信度相同;当横摆角速度传感器的观测值小于0且越接近于0时,汽车横向运动趋势较弱,可以认为此时驾驶员在进行方向调节,运动模型为CA模型与CV模型的可能性越大。设定在检验门限值处各运动模型的基本概率分配函数均为0.5。因此,横摆角速度传感器对辨识框架中的各运动模型的基本概率分配函数为:
式中:m1()为横摆角速度对CTR模型与CTRA模型的基本概率分配函数计算公式;m2()为横摆角速度对CV模型与CA模型的基本概率分配计算公式;0与1的值通过试验获得。
对于表示空间的不确定度目标框架,系统的基本概率分配函数为:

此外,假设系统的运动轨迹必然出现在辨识框架的不同运动模型中,不考虑不确定性问题。
各传感器对目标框架的基本概率分配函数确定以后,即可利用上述D-S证据理论合成公式进行证据合成,求得所有证据下对各目标框架新的概率分配,再依据选定的判决规则,推出当前最优的运动模型。在本研究中,使用基于规则的判决方法进行最优运动模型选择。
3 仿真与试验
3.1 联合仿真
首先在Carsim与LabView仿真环境下验证基于D-S证据推理的汽车轨迹预测算法,其中,轨迹预测算法在LabView软件中编写。图3和图4分别给出了Carsim中某道路的轨迹曲线与汽车驶过该道路时的汽车加速度、横摆角速度曲线。
将数据导入到D-S证据推理算法进行轨迹预测,参考文献[3]中的门限值,加速度门限a0取0.2 m/s2,a1取0.4 m/s2,横摆角速度的门限值0取0.02 rad/s,1取0.05 rad/s。根据1.3节中的判决规则,此处取:(1)被选中的目标框架汽车运动模型具有最大的概率分布数值。(2)被选中的目标框架汽车运动模型的概率分布数值与运动模型的概率分配数值相差大于0.05;(3)选定的汽车运动模型概率分布函数应大于0.4。
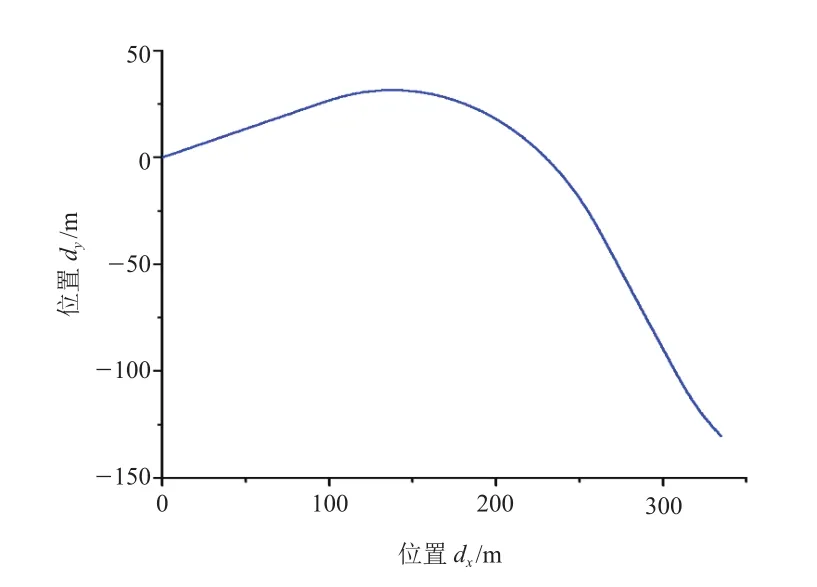
图3 道路曲线

图4 汽车运动状态
最终得到轨迹预测结果如图5所示。仿真结果表明,采用D-S证据推理的轨迹预测算法相比单一的运动模型,在任意时刻的预测周期都更接近实际的汽车轨迹。

图5 轨迹预测的仿真结果
3.2 实车试验
选择某停车场进行实车试验, 在GPS信号良好的空旷地带采集GPS信息作为道路定位信息。图6给出了GPS采集并经过坐标转换后的汽车运动轨迹曲线与相应的卫星地图。

图6 汽车的运动轨迹
试验过程中利用惯导设备采集的汽车运动状态信息如图7所示。在实车试验中对传感器信号采取卡尔曼滤波预处理,同时认为连续3次超过门限才为有效更新。
将以上数据导入到D-S证据推理算法中进行轨迹预测,再将预测结果与各运动模型单独预测的结果进行对比,如图8所示。

图7 汽车的运动状态

图8 汽车D-S轨迹预测结果对比
选取图中的3个点(A、B、C),其在运动过程中传感器的观测值见表1。

表1 传感器观测值
利用上述传感器观测值,带入基本概率分配函数表达式(12)~(15)计算各个传感器对不同运动模型的概率分布,其结果见表2。
根据表2中不同传感器对不同运动模型的基本概率分布,即可按照Dempster合成规则对各个传感器的证据进行合成,计算合成后对不同运动模型的概率分布。合成后的概率分布计算结果见表3。

表2 基本概率分配计算

表3 A、B、C三点的基本概率分配函数计算值
由图8和表3可知,D-S证据推理通过多传感器证据的融合,可有效处理模型不确定的问题,在每一个预测周期都能选择最佳的汽车运动模型。例如,对于图中的3个点(A、B、C),D-S证据推理算法分别选择为CA模型、CTR模型和CTRA模型。
4 结论
本文围绕D-S证据理论设计了一种新的汽车行驶轨迹预测方法。在4种运动模型的基础上,建立了以加速度信号和横摆角速度差分信号作为证据源的D-S证据推理轨迹预测系统。给出了该D-S系统的总体框架与基本概率分配函数,并分别进行了Carsim/LabView联合仿真与实车试验。结果表明,D-S证据推理在每个轨迹预测周期内都能有效、准确地得出最佳的运动模型,解决了汽车行驶过程中运动模型的不确定问题。
参考文献(References):
[1]陈慧岩,熊光明,龚建伟. 无人驾驶汽车概论 [M]. 北京:北京理工大学出版社,2016.CHEN Huiyan,XIONG Guangming,GONG Jianwei.Introduction to Self-driving Car [M]. Beijing:Beijing Institute of Technology Press,2016.(in Chinese)
[2]LI X R,JILKOV V P. Survey of Maneuvering Target Tracking. Part I. Dynamic Models [J]. IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1255-1321.
[3]POLYCHRONOPOULOS A,TSOGAS M,AMDITIS A J. Sensor Fusion for Predicting Vehicles’ Path for Collision Avoidance Systems [J]. IEEE Transactions on Intelligent Transportation Systems,2007, 8(3):549-562.
[4]ADAM H,PHILIPPE B,VÉRONIQUE C. Vehicle Trajectory Prediction Based on Motion Model and Maneuver Recognition [C]// IEEE RSJ International Conference Systems,2013:4363-4369.
[5]PANAGIOTIS L,GEORGE T,MANOLIS T. An Advanced Cooperative Path Prediction Algorithm for Safety Applications in Vehicular Networks [J]. IEEE Transactions on Intelligent Transportation Systems,2011,12(3):669-679.
[6]邵清波. 纵坡工况下汽车轨迹预测算法的研究 [D]. 长春:吉林大学,2015.SHAO Qingbo. Trajectory Prediction for Vehicle in the Slope Condition [D]. Changchun:Jinlin University,2015.(in Chinese)
[7]CHEN Yuanchao,WEN Guangrui,DONG Xiaoni.Research on Rotor Condition Monitoring Based on D-S Evidence Theory [C]//2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence,Xi’an,China:IEEE,2016:848-853.
[8]蒋雯,张安,杨奇. 一种基本概率指派的模糊生成及其在数据融合中的应用 [J]. 传感技术学报,2008,21(10):1717-1720.JIANG Wen,ZHANG An,YANG Qi. Fuzzy Approach to Construct Basic Probability Assignment and Its Application in Multi-sensor Data Fusion Systems [J]. Chinese Journal of Sensors and Actuators,2008,21(10):1717-1720.(in Chinese)
