基于MIMO天线阵列的三维雷达探测
2018-02-28曹申艺付云起孙占山张雪松谷磊
曹申艺 付云起 孙占山 张雪松 谷磊

摘要
本文提出了一种基于MIN天线阵列的三维探测雷达系统。目标的三维位置可以由距离、速度、方位角和高度来决定。本文提出了一种利用动目标探测(MTD)和数字波束形成(DBF)同时获取目标三维信息的MIMO天线阵列。此外,本文利用所提出的信号处理方法解决了多目标情况下三维信息之间的不匹配问题并且降低了误警概率。通过仿真验证了该方法的正确性。
【关键词】三维探测 MIMO MTD DBF 多目标
1 引言
近年来,随着自动避碰雷达安全系统的普及,三维雷达探测技术得到了极大的发展。平面阵列、相控阵和机械扫描天线阵是实现三维探测的最常用方法,但这些天线系统的复杂性和成本较高。本文提出一种包含3个发射天线和2N个接收天线的时分多路复用(TDM)MIMO阵列,在水平和垂直两个维度都实现了1×2n探测效果。
一个目标的距离和速度可以通过将动目标探测(MTD)应用于接收天线的差频信号获得,二维的角度可以通过数字波束形成(DBF)确定,从而可以直接确定目标的三维信息。但是,在多目标情况下,一个目标的方位角和高程信息可能存在不匹配问题,例如两个目标的二维角度可能是(θ1,φ1),(θ2,φ2)也可能是(θ1,φ2),(θ2,φ1)因此产生虚警或者漏警的情况。本文提出了分别配对距离一速度、距离-角度以及速度一角度,合成目标三维信息的信号处理方法。
2 MIMO天线阵列
设计MIMO阵列是为了在低系统成本的情况下提高角度分辨率。利用调频连续波(FMCW)模式,通过混合发射和接收信号来获取差频信号,差频信号同时包含距离、速度和角度信息。当对MIMO虚拟阵列的差频信号进行DBF确定二维角度时,仅通过一个差频信号就可以得到距离和速度。
2.1 天线结构
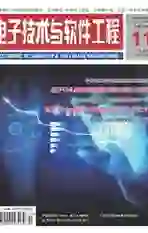
MIMO天线结构如图1所示。接收天线之间的距离为d,发射天线和接收天线之间的距离为d/2,其中d为波长的一半。接收阵列位于两个正交维度,发射天线分布在两端。
2.2 工作原理
与同时工作的接收机信道相反,发射机按时间间隔Tsw顺序运行。通过对发射机I的FMCW扫描,可以直接确定二维的距离和速度,而对发射机2和发射机3的扫描,可以分别得到方位角和高程。
由于相邻接收机之间的距离d,例如水平阵列接收到的差频信号会在N个接收天线之间存在连续的相位偏移,可以表示为:
其中λ为波长,θ为目标的方位角。如图1所示,考虑到发射机1与2之间的距离为Nd,发射机2扫描引起的差频信号的相位偏移可以表示为:
因此,通过结合两次扫描,将具有相等相位偏移量的差频信号的数量扩展到2N,差频信号的数组因子可以写成:
因此,接收天线在水平方向等于2N,方位角的分辨率得到两倍的改进。通过发射机I和3的工作方式可以得到垂直方向上的虚拟阵列。
假设一个目标的方位角为-15°、仰角为15°,以(-15°,15°)的形式表示。DBF检测角度的仿真结果如图2所示。
3 三维信息合成原理
目标的三维位置可以由距离、速度、方位角和高度来决定。基于多普勒信息在连续扫描时间内的差频信号,将MTD应用到一个接收机的差频信号中,可以同时得到差频信号的距离和速度。目标距离为100m,速度为5m/s的MTD仿真结果
这样,一个目标3D信息就确定了,并且位于(100m,-15°,15°)的目标的3D检测的仿真结果。
单个目标的三维信息可以直接合成,不會出现误报或漏报。然而,在多个目标的环境下,由于距离和角度的独立性,一个目标的两个维度的距离和角度不能准确匹配。考虑到调制带宽为B且调制周期为T的调频连续波雷达系统。两个目标的N个方位接收机的差拍信号可表示为:
其中i是目标的数量,n是接收天线的数量,ηi=2BPi/Tc+2vi/λ是差拍信号的中心频率。由于同时接收多个接收机,每个接收机的差频信号被写为:
接收机的频谱可以通过对响应的差频信号作FFT变换得到,并且可以被表示为:
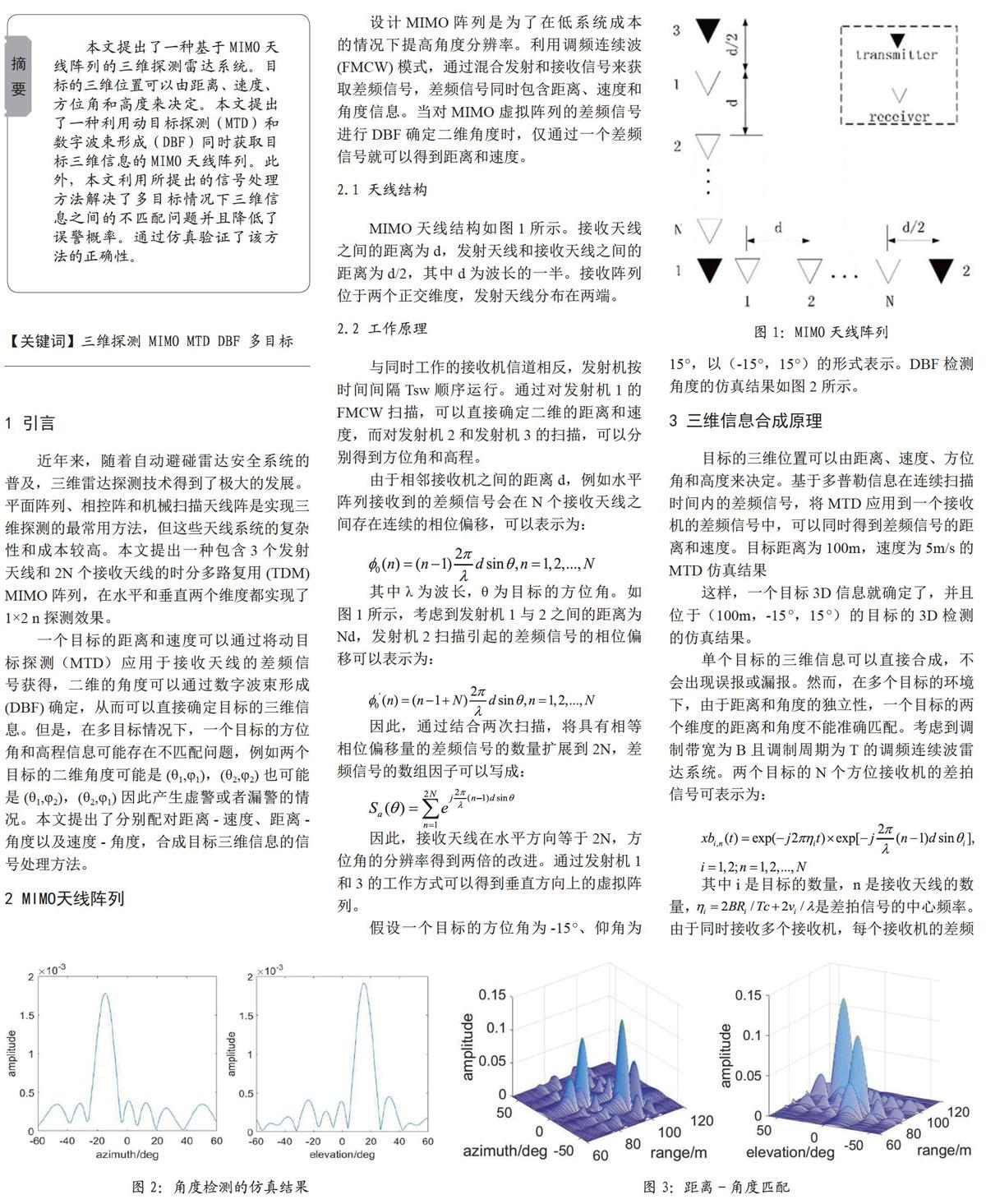
其中k=1,2…P,它表示一个扫描周期T被离散化为P个点。上面的公式表明频谱中的每条线都代表了一个距离单元,它包含了方位的相位项。因此,首先通过FFT变换,然后同时采用MTD和DBF,可以同时获得距离,速度和方位角。同样的,距离、速度和高程也可以用这种方法获得。对于处于(80m,10°,-10°)和(100m,-20°,20°)的目标进行距离一角度匹配的仿真结果如图3所示。
可以看出,距离一方位和距离一俯仰分别实现了精确匹配。
事实上,由于距离与二维角度不具备相关性,所以会出现多目标的距离相同,单目标的方位和高程可能出现不匹配问题的特殊情况。为了实现多目标情况下三维信息的精确匹配,本文提出了一种信号处理方法,分别在二维空间下对距离一速度,距离一角度和速度一角度进行匹配,从而可以合成每个目标的三维信息。
首先考虑N个方位接收机。假定调频连续波雷达发送K个扫描周期,并且每个周期中的差频信号的采样点是P。对每个周期的N个差频信号按顺序应用FFT变换,获得具有N×K个周期的距离谱。距离谱可以被写为SRn(K×P)。
然后将MTD应用到距离谱的K个周期的同一距离单位,以便获得速度谱Svn(K×P)。最后,将DBF应用于N个接收机的同一速度频谱单元,就能获得与一个目标的唯一速度相对应的方位信息。速度一仰角匹配结果可以以相同的方式获得。
二维速度和角度实现了精确匹配,一个目标的速度可以称为方位角和仰角的相关性,从而可以专门合成三维信息。
4 结论
本文提出了一种三维检测雷达系统来精确合成一个目标的三维信息。为了解决距离,方位角和仰角之间的不匹配问题,该工作分别实现了距离-速度,距离-角度和速度-角度匹配,从而使三维信息可以独立合成。本文所提出的信号处理方法通过仿真进行了验证。
参考文献
[1]Harter M,Chaudhury S,Ziroff A,etal.Realization of an innovative3D imaging digital beamformingradar system[C]//2011 icee cieinternational conference on radar,2011:186-189.
[2]Barrick D E,Lipa B J,Lilleboe PM,et al.Gated FMCW DF Radar AndSignal Processing For Range/Doppler/Angle Determination[J].1994.