一种新的融合空间信息的半监督变化监测方法
2018-02-28谢福鼎于珊珊
谢福鼎,于珊珊,杨 俊
(辽宁师范大学城市与环境学院,辽宁 大连 116029)
遥感图像变化监测指的是从同一区域、不同时期的遥感图像中,寻找变化信息的过程[1]。近年来,随着变化监测技术的日益成熟,遥感图像变化监测技术已经成为监测地球表面的一种不可或缺的手段,并广泛运用于城市发展、森林覆盖变化、森林火灾、湿地变化等领域[2]。对此,国内外众多学者也在不同方面使用不同方法进行了研究。
在众多研究方法中,常用的方法可分为两种:①分类后比较法,即先对每个时相的图像进行分类,然后对分类后的各时相图像进行比较[3-4]。②比较后分类法,即先构造一幅差异图像,然后对这幅差异图像进行(阈值法或分类法)处理[2,5-11]。
采用遥感软件(ENVI、ERDAS)做的变化监测通常是分类后比较法。文献[3]选取郑州市3年的遥感数据,采用ENVI软件和决策树分类算法提取城镇、植被和水体信息,比较变化信息,对郑州市城市变化进行了分析。
在数据挖掘领域,通常是构造一幅差异图像,然后用聚类算法对差值图像进行聚类。杜培军等提取遥感影像的多种特征,构造差异图像,运用支持向量机(SVM)的分类器分类,最终实现变化信息的融合与输出[6]。监督分类由于有部分类别信息,监测效果优于无监督分类,近年来,也被很多学者用于变法监测领域。文献[7]提出了一种半监督的距离度量变化监测方法,结果表明此方法在有噪声的环境下也可以取得较好的监测结果。
一般的,聚类算法只考虑了图像的光谱信息而忽略了像元点间的邻接关系,使得分类图像出现离散的噪音点[9]。针对此类问题,众多学者也作了相关改进。Shekhar Mishra等将FCM方法分别与SA(模拟退火算法)和GA(遗传算法)结合,同时融入了空间信息,结果表明,融合空间信息的SA与FCM相结合的方法能取得较好的检测效果。通过对马尔科夫随机场中像素空间关系的定义和空间信息权重的确定进行研究,并把非参数核密度函数与FCM方法结合,文献[9]提出了基于FCM算法和马尔科夫随机场的变化检测方法。
传统的半监督聚类需要真实的地物信息,即每个样本都有类标签,但是这类信息通常不易得到。本文针对变化监测问题,在样本没有类标签的情况下,根据差值图像,给出了一种新的标记方法,分别标记差值图像中的变化点和不变点。在此基础上,本文提出一种新的半监督变化监测方法。运用改进的半监督FCM算法对标记后的差值图像进行聚类,该方法充分利用原始数据中的类别信息。同时,通过马尔科夫随机场模型,计算邻接像元的类归属,有效地将空间信息融入聚类过程中,去除噪声点,从而达到提高精度的目的。
1 融合空间信息的半监督FCM算法
1.1 半监督FCM算法
最早的半监督FCM算法(S-FCM)由Pedrycz提出[12],它通过引入有标签点的隶属度矩阵F=[fij],将无监督算法改进成半监督算法
(1)
式中,α(α≥0)取值为无标签样本点与有标签样本点个数的比值;bi是一个二值向量,当xi有标签时,bi等于1;否则,bi等于0。
1.2 改进的半监督FCM算法
假设将数据集X分成有标签样本XL和无标签样本XU的集合,改进后的半监督FCM算法[13]目标函数为
(2)
式中,α表示有标签样本点的个数与总样本个数的比值;μij表示第i个像元点属于第j类的隶属度;dij表示第i个像元点到聚类中心j的距离;dkj表示第k个像元点到聚类中心j的距离;[fkj]是有标签样本点的隶属度矩阵,它是一个二值向量,当k点属于第j类时,fij=1,否则fij=0。改进后的质心和隶属度更新公式为
(3)
(4)
显然,当α=0,即有标签样本点个数为0时,该算法退化为经典FCM算法;当α=1时,即所有的样本点都被标记,算法不进行迭代[13]。因此,所提出的算法可以被理解为经典FCM算法的一般化。
1.3 马尔科夫随机场模型
马尔科夫随机场(Markov random field,MRF)是一种综合利用光谱和空间信息的图像处理方法,近年来被广泛用于图像变化监测问题[8-9,14-15]。马尔科夫随机场指的是在一个空间中的每个点只与它相邻的点有关,而与其他的点无关[14]。它的空间邻域关系如图1所示。
对于一副图像PD中的像元点PD(i,j),MRF的局部能量函数为
uMRF(PD(i,j))=uspectral(PD(i,j))+uspatial(PD(i,j))
(5)
式中,uspectral(PD(i,j))是光谱能量函数;uspatial(PD(i,j))是描述各像元点之间空间关系的空间能量函数。
(6)
式中,N(i,j)表示点(i,j)的邻居;l(i,j)、l(g,h)表示点(i,j)和点(g,h)的类别;I(l(i,j)、l(g,h))是一个二值函数,当l(i,j)=l(g,h)时,值是1,反之,值是0。
本文结合FCM算法和式(5),得到隶属度矩阵的调整公式为
(7)

(8)
式中,μk,(g,h)表示点(g,h)属于k类的隶属度;d(i,j),(g,h)表示点(i,j)与他的邻接点(g,h)之间的欧氏距离。β用于调节空间信息与光谱信息之间的比重,本文试验中取β=1。
1.4 一种新的半监督变化监测方法
P1、P2是两幅同一地区,相同大小(I×J),为不同时间获得的遥感影像,将两幅图像做差得
PD=P2-P1
(9)
得到PD=PD(i,j)/1≤i≤J,1≤j≤J。其中,PD(i,j)指图像PD中的点,(i,j)指点的坐标。
本文提出了一种新的融合空间信息的半监督变化监测方法。针对变化监测问题,在样本没有类标签的情况下,根据差值图像,给出了一种新的标记方法。首先,根据式(9)得到差值图像PD。在图像PD中,灰度值较大的认为是变化的点,灰度值小的认为是没有变化的点[14]。本文将差值图像PD中的像元点PD(i,j)按照灰度值大小排序,选取灰度值较大的一部分标记为变化点,灰度值较小的一部分标记为不变点。然后运用改进的半监督FCM算法对标记后的差值图像聚类。同时,通过马尔科夫随机场模型,计算邻接像元的类归属,有效地将空间信息融入聚类过程中,去除了噪声点。
本文方法的具体过程如下:
(1) 对P1和P2两幅遥感图像做差值,得到差值图像PD。
(2) 标记差值图像中的变化点和不变点。
(3) 对标记完成的差值影像运用改进的半监督FCM算法聚类,根据式(3)—式(4)更新vj和μij,得到隶属度矩阵U。
(4)U代表光谱信息的隶属度矩阵,USpatial代表空间关系的隶属度矩阵,UMod代表融合空间信息和光谱信息的隶属度矩阵,用式(7)—式(8)迭代得到UMod。
(5) 根据UMod将差值影像分成变化类和不变类。
本文变化监测法方法的流程如图2所示。

图2 本文变化检测流程
2 试验与结果分析
2.1 试验数据
为了验证本文提出的变化监测方法的有效性,选取了两组同一地区不同时间获得的TM影像进行了试验。数据来源于马里兰大学网站(http:∥glcf.umd.edu/data/)。参考变化图像是运用ENVI软件通过目视解译获得的。
第1组数据集是2005年和2009年Borneo(婆罗洲)的森林覆盖图,图像大小都是268×268像元。图3(a)是2005年真彩色合成图像,图3(b)是2009年真彩色合成图像,由于森林被砍伐,部分森林变成裸地。

图3 婆罗洲数据集
第2组数据集是2000年和2005年Brazil(巴西)的森林覆盖图,图像大小均为400×400像元。图4(a)为2000年真彩色合成图像,图4(b)为2005年真彩色合成图像,由于森林被砍伐,部分森林变成裸地。
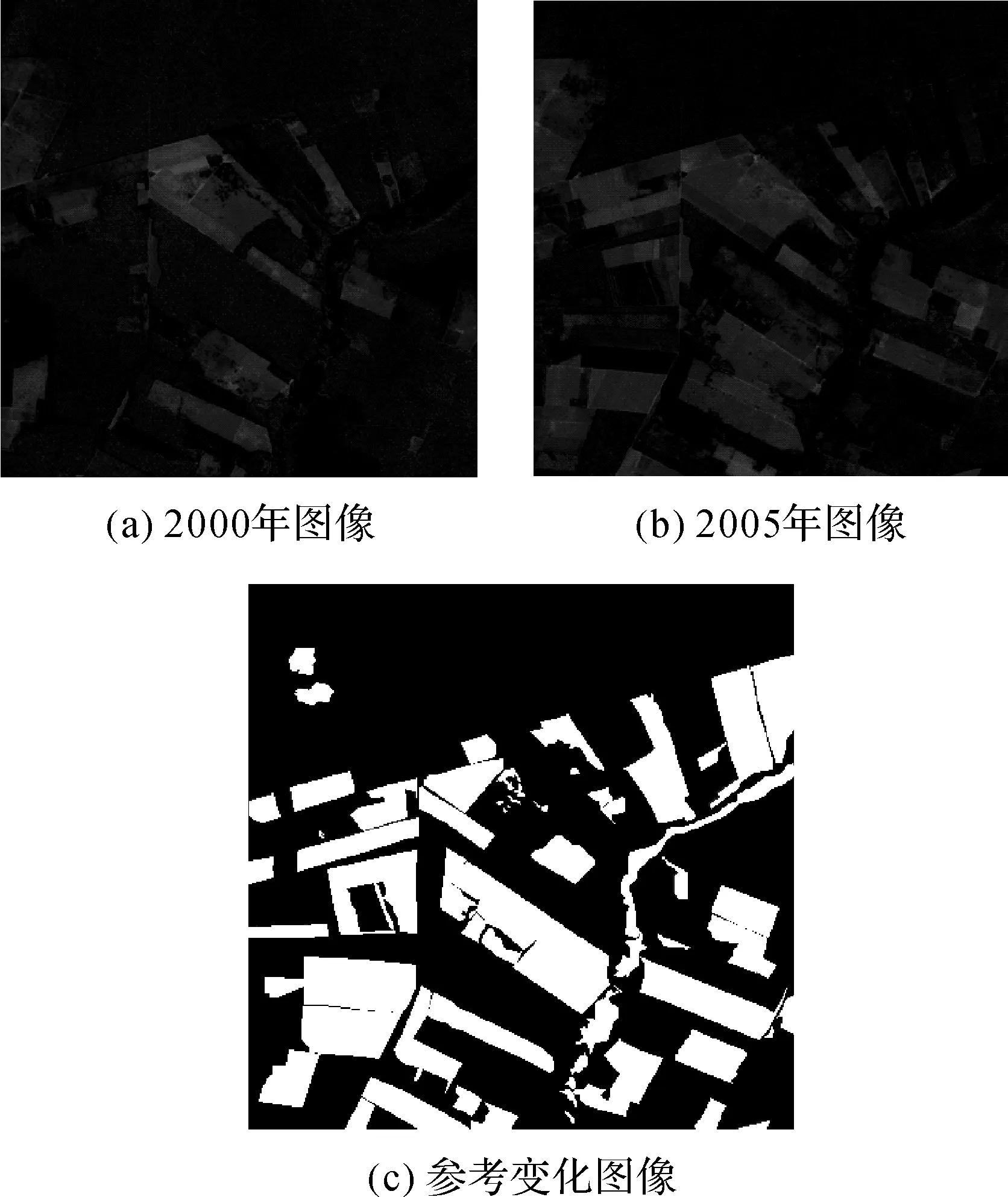
图4 巴西数据集
2.2 试验结果分析
由于本文的两组试验都是检测森林的变化,因此选择TM图像的第4波段进行试验,即差值图像的获得是将两幅影像的第4波段相减得到的。
为了验证本文提出方法的有效性,将FCM算法、融合空间信息的FCM算法(FCM-MRF)、改进的半监督FCM算法(MS-FCM)与本文方法(MS-FCM-MRF)作对比,比较分类精度。变化结果如图5和图6所示。本文分别取α=0.05、0.10、0.15进行了试验。本文运用以下几个指标来衡量监测结果的精度:漏检数(miss detection,MD),虚检数(false alarms,FA),总体错误概率(overall error rate,OE rate),Kappa系数(KC)[14-16]。结果见表1和表2。

图5 婆罗洲变化监测结果

图6 巴西变化监测结果
根据图表可以看出,只用聚类方法(FCM、MS-FCM)获得的变化监测结果图存在较多的噪声点,当聚类方法结合马尔科夫随机场分类时,噪声点明显减少,虚检数减少,Kappa系数增大。FCM方法与MD-FCM方法相比,MD-FCM方法可以监测到更多的变化区域,漏检数减少,Kappa系数增大。在MD-FCM方法中,随着α的增大,即标记样本比例的增大,监测的变化区域增多,漏检数减少,噪声点增多,虚检数增多,总体错误率减少。当α取最大值0.15时,Kappa系数达到最大值,变化监测效果最好。

表1 婆罗洲变化监测结果
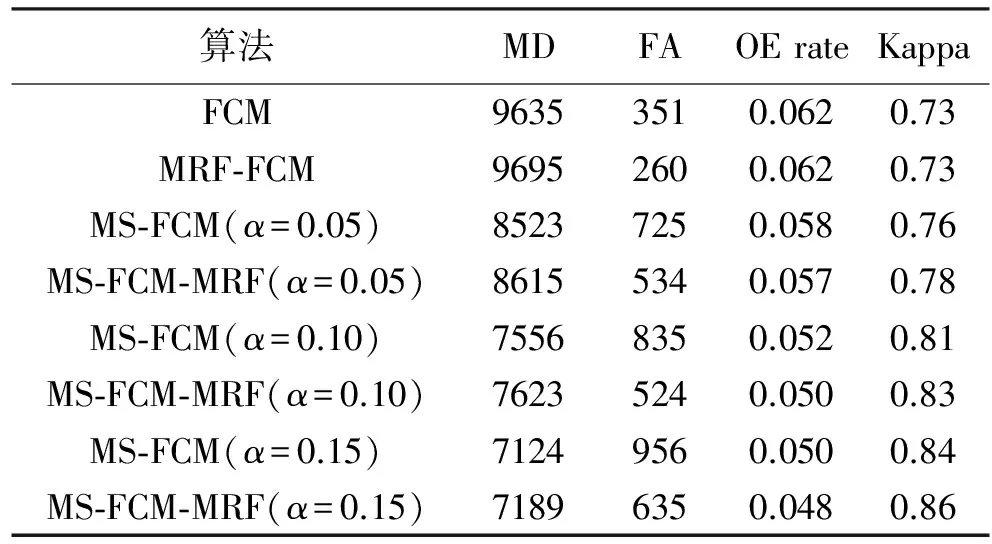
表2 巴西变化监测结果
3 结 论
本文提出了一种融合空间信息的半监督FCM变化监测方法,该方法针对变化监测问题,在样本没有类标签的情况下,根据差值图像,给出了一种新的标记方法。运用改进的半监督FCM方法对标记后的差值图像聚类,并通过马尔科夫随机场模型,去除了噪声点。该方法充分利用了原始图像中的类别信息,以及邻居像元点的空间信息。试验表明,该方法用于遥感图像的变化监测是可行的,改进的半监督FCM方法有效地提高了变化监测的漏检率,马尔科夫随机场方法有效地提高了变化监测的虚检率。因此,该方法也适用于其他变化监测。
[1] 周启鸣. 多时相遥感影像变化检测综述[J]. 地理信息世界, 2011, 9(2):28-33.
[2] 贾彩杰. 基于模糊聚类算法的遥感图像变化检测的研究[D]. 西安:西安电子科技大学, 2013.
[3] 刘乐乐,汪云甲,陈国良,等.基于多源遥感数据的城市变化监测研究——以郑州市为例[J].地域研究与开发,2010,29(1):136-140.
[4] 韦玮,崔丽娟, 李胜男,等. 基于偏差平均值的乌梁素海湿地变化监测研究[J]. 林业科学研究, 2012, 25(6):719-725.
[5] 夏双,阮仁宗,颜梅春,等.洪泽湖区土地利用/覆盖变化分析[J].遥感信息,2013,28(1):54-59.
[6] 杜培军,柳思聪. 融合多特征的遥感影像变化检测[J]. 遥感学报, 2012, 16(4):663-677.
[7] YUAN Y, LV H, LU X. Semi-supervised Change Detection Method for Multi-temporal Hyperspectral Images[J]. Neurocomputing, 2015, 148:363-375.
[8] MISHRA N S, GHOSH S, GHOSH A.Fuzzy Clustering Algorithms Incorporating Local Information for Change Detection in Remotely Sensed Images[J]. Applied Soft Computing Jarnal, 2012, 12(8): 2683-2692.
[9] 杨红磊,彭军还.基于马尔可夫随机场的模糊c-均值遥感影像分类[J].测绘学报,2012,41(2):213-218.
[10] 郝明. 基于空间信息准确性增强的遥感影像变化检测方法研究[D]. 徐州:中国矿业大学, 2015.
[11] 罗旺. 遥感图像的变化检测与标注方法研究[D]. 西安:电子科技大学, 2012.
[12] PEDRYCZ W,WALETZKY J.Fuzzy Clustering with Partial Supervision[J].IEEE Transactions on Systems Man,and Cybernetics,1997,27(5): 787-795.
[13] 谢福鼎,李壮.基于改进的半监督 FCM 算法的高光谱遥感影像分类[J].测绘通报,2016(9): 60-62.
[14] SHAO P, SHI W, HE P, et al. Novel Approach to Unsupervised Change Detection Based on a Robust Semi-supervised FCM Clustering Algorithm[J]. Remote Sensing, 2016, 8(3):264.
[15] SUBUDHI B N, BOVOLO F, GHOSH A, et al. Spatio-contextual Fuzzy Clustering with Markov Random Field Model for Change Detection in Remotely Sensed Images[J].Optics & Laser Technology,2014,57(1):284-292.
[16] GONG Maoguo, LI Yu, JIAO L,et al.SAR Change Detection Based on Intensity and Texture Changes[J].ISPRS Journal of Photogrammetry and Remote Sensing,2014,93(93): 123-135.
