AR交互控制平台
2018-02-27夏继强王雪洁田甘霖马丽敏王云龙张弛
夏继强 王雪洁 田甘霖 马丽敏 王云龙 张弛
摘要
AR交互控制平台是具有灵活性易操作性的载体,主要是应用于相对复杂的环境中。通过VR眼镜盒可以实现对机器人最直观的控制,可通过感测操控者的头部动作灵活控制摄像头观测角度,使操控者更加方便的勘察四周情况,便于整个载体的动作。不断完善这种控制平台,争取让其在未来可以应用于实际中。
【关键词】AR交互 远程控制 勘察
1 研究背景
AR交互控制平台,可运用于高危环境下的信息采集和替代人类完成一些危险的动作。比如在用于火情勘察,当发生火灾时,可通过AR交互控制平台替代人进入火灾現场进行勘测,避免不必要的人员伤亡。通过在AR交互控制平台上搭建了一个机械臂,主要是用来在紧急时刻帮助人们完成一些动作,在高危环境下进行抢救一些重要物品。
2 设计原理
2.1 设计思路
本设计采用AR交互技术,通过姿态陀螺仪和压力传感器感测出操控者的肢体动作,从而控制控制平台上的机械臂来替代人完成一些危险动作。通过手柄操控控制平台的移动。通过摄像头云台,可通过感测操控者的头部动作灵活控制摄像头观测角度,使操控者更加方便的观测四周情况。目的可以灵活的控制平台,在复杂的环境中替代人类完成危险动作。
2.2 研究方法
结合上述说明,设计出这样一个作品,以下是详细说明。
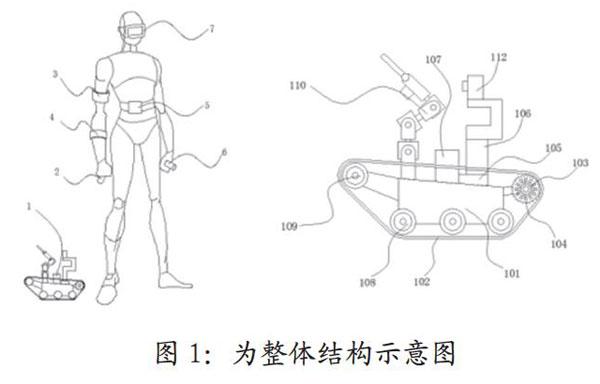
如1所示。
图1中:AR交互控制平台,包括:1控制平台、101底座、102履带、103驱动装置、104驱动齿轮、105控制板、106云台、107车载锂电池、108滚轮、109从动轮、110机械臂、111机械爪、112摄像头、2压力传感器、3第一陀螺仪、4第二陀螺仪、5控制盒、6手柄、601摇杆、7VR眼镜盒。
具体实施方式:
包括控制平台1、压力传感器2、第一陀螺仪3、第二陀螺仪4、控制盒5、手柄6和VR眼镜盒7,其特征在于:机器人1包括底座101,底座1底部的左侧固定连接有机械臂110,机械臂110有四个自由度构成,机械臂110的顶部固定连接有机械爪111,底座101右侧的顶部固定连接有驱动装置103,驱动装置103为直流电机,驱动装置103输出轴的一端固定连接有驱动齿轮104,底座101的底部转动连接有滚轮108,底座101左侧的顶部通过固定支架转动连接有从动轮109,驱动齿轮104、滚轮108和从动轮109的表面分别传动连接有履带102,底座101的顶部固定连接有车载锂电池107,底座101的顶部且位于锂电池107的右侧固定连接有控制板105,控制板105的顶部固定连接有云台106,云台106的顶部固定连接有摄像头112,控制盒5安装在使用者的腰部位置,控制盒5的内部设置有锂电池,控制盒5和控制板105的内部均集成了通信模块,通信模块包括蓝牙芯片、Wi-Fi芯片和TD-LTE通信基带,压力传感器2由使用者右手握持,第一陀螺仪3套设在使用者的右臂上臂位置,所诉第二陀螺仪4套设在使用者右臂前臂位置,手柄6顶部的一侧转动连接有摇杆601,VR眼镜盒7套设在使用者头部位置,VR眼镜盒7内部设置有手机,压力传感器2,第一陀螺仪3,第二陀螺仪3、手柄6和VR眼镜盒7通过电线分别与控制盒5连接,驱动装置103、机械臂110、机械爪111、云台106和摄像头112通过数据线分别与控制板105连接。
使用时,控制盒5与控制板105通过Wi-Fi、蓝牙和TD-LTE数据进行数据交换,左手通过手柄6上的摇杆601控制机器人1运动,右手通过第一陀螺仪3和第二陀螺仪4控制机械臂110运动,压力传感器8控制机械爪111开合,摄像头112所得画面传输到VR眼镜盒7中,使用者头部通过VR眼镜盒7中的手机对云台 106控制实现转动俯仰。
3 创新特色
本设计采用了履带式传动轮,具有一定的承重效力,履带式传动轮相比于普通车轮,可以使用的地形更加广泛,即使在恶劣的气候下,影响也较小。AR交互控制平台前方的履带与地面具有一定角度,这样的实际便于应对有一定坡度的地形。目前很多载运平台采用传统履带底盘搭载一个机械臂,但是爬坡能力较弱,控制方式也及其复杂,遥控器按钮较多,操作员需要同时控制车体的运动,还需要控制机械臂的运动,往往需要经过很长时间的训练才能够熟练掌握操作方法,同时视频回传的视频画面只能固定的显示在终端设备上面。操作人员很难有身临其境的感觉。这样使操作难度增加,很难灵活的控制载运平台,AR交互控制平台解决了这一难题,结合传感式机械手臂,机械具有了人肢体的灵活。
4 应用前景
在事故多发的现今,在某些特定的情况下,操控者只需要在外面穿戴一套操控设备,戴一个VR眼镜,通过VR眼镜盒可以实现对控制平台最直观的控制,通过摄像头云台,可通过感测操控者的头部动作灵活控制摄像头观测角度,使操控者更加方便的勘察四周情况。还可根据操控者的动作灵活的控制它,可以弥补复杂环境下的自由变动。本设计具有良好的应用前景。
参考文献
[1]王涌天,陈靖,程德文.增强现实技术导论[M].科学出版社,2015.
[2]徐学磊增强现实必知必会的工具与方法[M].机械工业出版社2013.
[3]何强,陈清奎,陈玉龙,姜小会.基于ARToolkit的增强现实系统开发及应用[J].现在制造技术与装备,2013.
