提高电动汽车行驶时无线充电效率的电磁耦合追踪装置
2018-02-27韩语晨王清懿
韩语晨 王清懿
摘要
电动汽车在无线充电公路上行驶时,由于公路磁场分布不均匀,随着汽车轨迹的偏移,底盘固定的接收线圈无法始终朝着磁通量最大的方向,无法获得最大的充电效率。本文设计了一种可根据磁场强度的变化自动调节线圈朝向的电磁耦合追踪装置,通过磁场传感器检测公路的磁场强度,并将得到的信号分析处理,控制机械转动部分调整接收线圈,使之朝向磁通量最大的方向以获得最大的充电效率。
【关键词】无线充电公路 磁场追踪 电磁耦合
1 简介
如图1,本装置安放在汽车底盘,分为磁传感器部分,信号处理部分和机械转动部分。利用磁传感器,实时检测无线充电公路上磁场强度的分布,将信息反馈给信息处理器,分析出磁通量最大的方向,进而控制机械转动部分调整接收线圈的朝向,使接收线圈与公路磁场之间产生最大的电磁耦合率,时刻保持最大的能量传输效率。
2 设计原理
2.1 硬件组成
2.1.1 传感器结构及工作原理
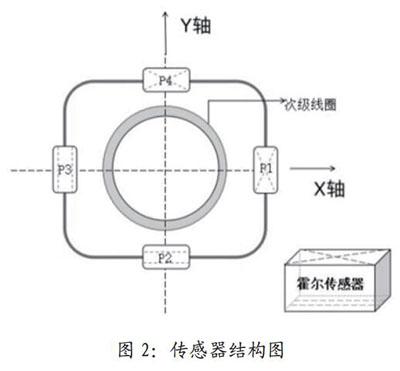
图2是传感器的结构图:在次级线圈的切面方向上设置四个霍尔传感器,分别为P1、P2、P3、P4。其中霍尔传感器P1、P3相反地放置在切面的竖直方向上,P2、P4相反地放置在切面的水平方向上。霍爾传感器感应到磁场,会根据磁场强度的不同输出电压值,此电压值与磁场强度呈线性关系。当线圈切面并不完全与磁场方向垂直时,相对的两个霍尔传感器输出的电压值大小相等、符号相反,运算放大器就会输出差值信号,该差值信号送入控制电路,驱动电机调整线圈的角度,使线圈切面与磁场方向垂直,此时的感应电流为最大值。两组相对的霍尔传感器分别控制线圈的方向角和仰角,可以实现空间范围内线圈朝向的变化,保证感应电流达到最大。
本装置的信号处理与控制电路主要包括:差值放大器部分、数模转换部分、单片机控制部分和步进电机驱动部分。
差分放大电路用来对传感器信号进行放大,输入单片机前用数模转换器把模拟信号转换成数字信号。
从4个传感器输出的信号经过预处理后,分别得到信号U1、U2、U3、U4。其中U1、U3经过运算放大器后得到东西方向的跟踪控制信号Ux,而U2、U4经过运算放大器后得到南北方向的跟踪控制信号Uy。放大后的两路信号转换成数字信号后再送入单片机中,在单片机中,先判断各路信号的值,然后由软件产生相应的信号去控制调整机构实现相应的方向调整,以实现对磁场方向的跟踪。
2.1.2 机械转动舵机
其工作原理是由接收机发出讯号给舵机,经由电路板上的IC驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。
2.2 软件设计
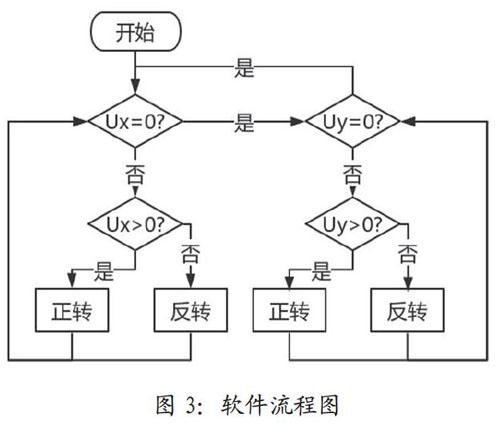
整个系统是在单片机的协调控制下完成,软件流程见图3.
在单片机中,对A/D转换后的传感器输出的信号进行处理。步骤如下:
先判断Ux是否为零,如果不为零,则根据Ux的值由单片机输出相应的跟踪控制信号控制方位角调整机构实现相的位置调整,如果Ux为零,再判断y是否为零,如果不为零,则根据Uy的值由单片机输出相应的跟踪控制信号控制高度角调整机构实现相应的位置调整,如果Uy为零,则停止跟踪。
3 结束语
本文利用磁传感器设计了一种能够提高电动汽车无线充电效率的电磁耦合追踪装置,磁传感器接收信号,通过线圈两侧的信号差值可以计算线圈与磁场所成角度,利用舵机调整线圈角度从而提高能量转换率。本装置可以有效地节约无线充电公路的电能,提高电能的利用率。此外,本装置结构相对简单,成本较低,安装方便,利于普及。
参考文献
[1]赵争鸣,刘方,陈凯楠.电动汽车无线充电技术研究综述[J].电工技术学报,2016,31(20):30-40.
[2]李斌,刘畅,陈企楚,林晶怡,邓小元.电动汽车无线充电技术[J].江苏电机工程,2013,32(01):81-84.
[3]Anthony Thomson.WirelessCharging:TheFuture of Electric Vehicles[M].Springer International Publishing:2013-06-15.
