基于R日F神经网络的水声目标分类
2018-02-27侯铁双
摘要
目标识别分类是水声信号处理的一个重要研究方向。本文以舰船辐射总声源级与舰船螺旋桨轴频作为特征量,设计径向基函数神经网络作为分类器,经实测数据验证,该算法在减少数据计算量的同时,对于舰船吨位大小的识别达到较好的效果。
【关键词】神经网络 水声信号处理 识别分类
目标识别分类是水中兵器研究的一个重要方向,在国内外一直受到重视并取得了一些进展。在目标识别中,特征量的提取起着关键的作用,能否提取反应目标本质的特征量直接关系到识别分类的性能。对于水中兵器而言,能够及时发现目标并迅速作出反应是非常重要的。为了实现这一功能,选择合理的目标特征量是关键的一步,国内外研究人员在该领域提出了多种方法。但是这些方法的共同特点就是选取的目标特征量维数较高,在识别分类环节难以做到实时处理,所以有必要寻找更能反映目标类别、维数更少的特征量。
1 特征量选择
在舰船的辐射声特征中,宽带总声源级反映了舰船辐射的声能量,包含有舰船航速、类型,尤其是吨位大小的相关信息。对于水面舰船、商船和潜艇这三类目标来说,潜艇的总声源级明显小于其它两类。测量数据显示,大型水面舰船辐射声功率可达1千瓦,而安静航行的潜艇辐射功率小于10毫瓦。另一个与目标舰船航速、类型有关的特征量是目标舰船的低频段线谱噪声,主要由螺旋桨轴频和叶片频及其谐波构成,随目标舰船的航速变化而变化。测量数据显示:商船的螺旋桨轴转速较低,其轴频线谱频率在0.9~3.6Hz内,现代商船大约在1Hz;大型水面舰船的螺旋桨轴转速较高,通常在3~6Hz;而潜艇航速一般都较低,其线谱频率也较低。
对于舰船宽带总声源级和线谱频率的测量相对来说,算法相对简单,能满足实时性要求。因此选择宽带总声源级和线谱频率作为特征量,可实现对三类目标的识别分类。
2 舰船宽带总声源级
声源级表示舰船辐射声功率的大小,定义为在目标方向上离目标舰船的声学中心1米处的辐射声强度,与均方根声压为1微帕的平面波强度之比,以分贝表示。声学中心是船内或船外的一个点,当在远处进行测量时,噪声好象是从这一个点辐射出来的一样。实际上,测量辐射噪声时,必须和辐射船离开一定的距离,再对波阵面扩展作适当的修正,折算到1米处。规定声源级是1赫兹带宽内,并以1微帕为参考级,因而,辐射噪声的声源级就是相对于1微帕参考级的谱级。
Ross[7]根据测量数据进行统计运算,得出航速8~24节的舰船在0.1~10KHz频带内的总声源级经验公式
或
式中V是航速(节),T是吨位(吨),参考声压是1μpa。
舰船噪声测量规定在标准距离上进行,在实际测量中都不是在标准距离上进行的。这样测量得到的总声源级需要换算到标准距离处的总声源级值。具体计算就是将不同距离上的测量值,加上声波在海洋中的吸收损失和传播损失。由于在实际测量中,测量点距舰船距离不是很远,吸收损失相对较少,可忽略。因此,计算总声源级时,只考虑传播损失,即
TL≈20logr(3)
式中,r是测量点距舰船的距离。
这样就得到目标舰船总声源级
SL=SL'+TL(4)
3 线谱频率
舰船辐射噪声线谱分为两类:频率固定的线譜和频率变化的线谱。舰船辅机产生的线谱分量与舰船的航速无关,通常相当稳定。因此,不能作为对目标进行吨位大小的识别分类的特征量。当航速增加到使螺旋桨产生空化时,推进系统和螺旋桨产生的线谱幅度增加,并向高频移动,可作为对目标舰船进行吨位大小识别的特征量。
研究证明,通过对调幅的空化噪声进行解调可以获得螺旋桨的轴频线谱。对于轴频线谱的提取采用文献[8]中提出的复解析小波变换算法,详细计算过程可参考相关文献。
4 径向基函数神经网络(RBF)
4.1 径向基函数神经网络结构
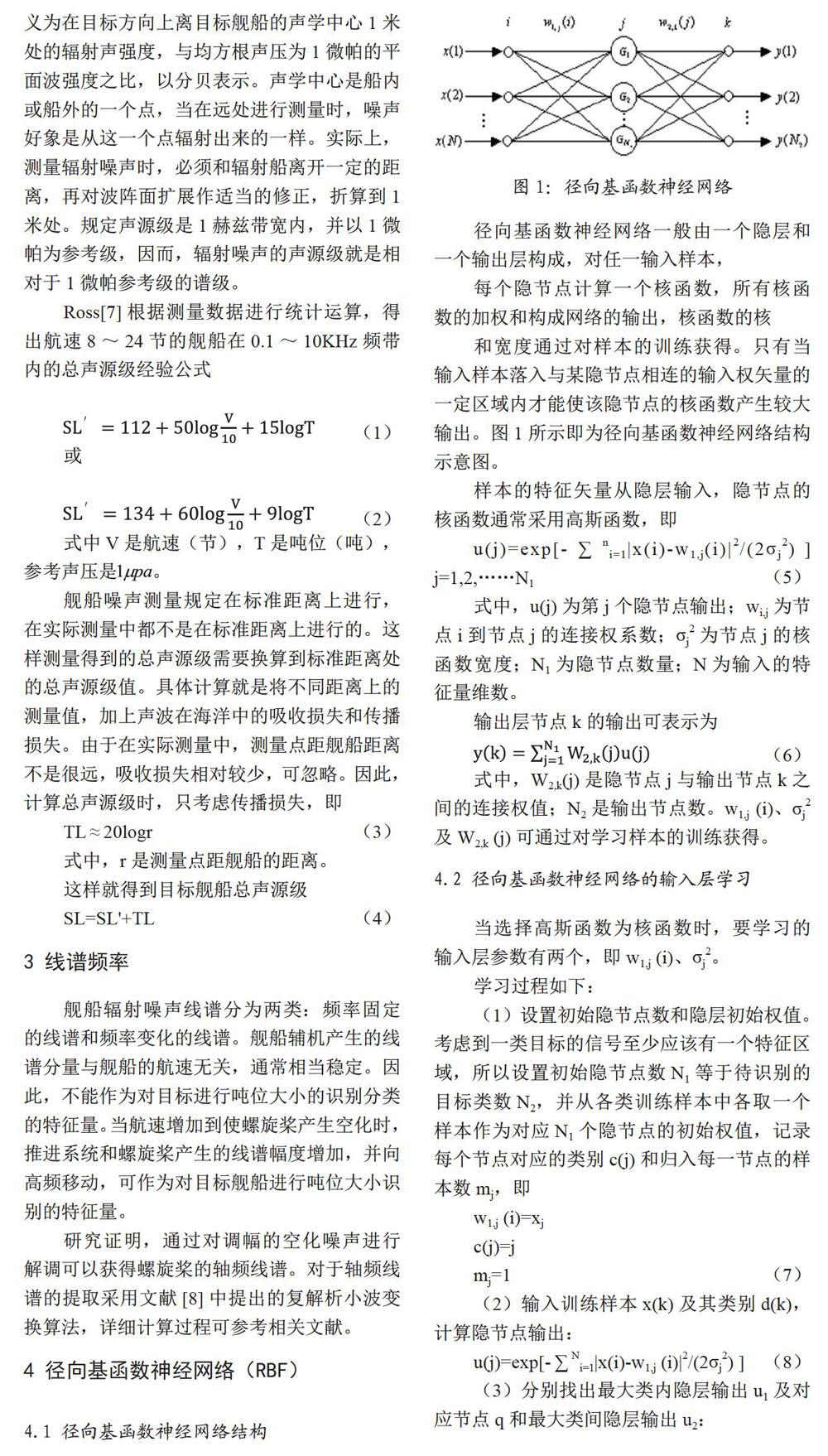
径向基函数神经网络一般由一个隐层和一个输出层构成,对任一输入样本,
每个隐节点计算一个核函数,所有核函数的加权和构成网络的输出,核函数的核
和宽度通过对样本的训练获得。只有当输入样本落入与某隐节点相连的输入权矢量的一定区域内才能使该隐节点的核函数产生较大输出。图1所示即为径向基函数神经网络结构示意图。
样本的特征矢量从隐层输入,隐节点的核函数通常采用高斯函数,即
式中,u(j)为第j个隐节点输出;wi,j为节点i到节点j的连接权系数;σj2为节点j的核函数宽度;N1为隐节点数量;N为输入的特征量维数。
输出层节点k的输出可表示为
式中,w2,k(j)是隐节点j与输出节点k之间的连接权值;N2是输出节点数。w1,j(1)、σj2及W2,k(j)可通过对学习样本的训练获得。
4.2 径向基函数神经网络的输入层学习
当选择高斯函数为核函数时,要学习的输入层参数有两个,即w1,j(i)、σj2。
学习过程如下:
(1)设置初始隐节点数和隐层初始权值。考虑到一类目标的信号至少应该有一个特征区域,所以设置初始隐节点数N;等于待识别的目标类数N2,并从各类训练样本中各取一个样本作为对应N1个隐节点的初始权值,记录每个节点对应的类别c(j)和归入每一节点的样本数mj,即
(2)输入训练样本x(k)及其类别d(k),计算隐节点输出:
(3)分别找出最大类内隐层输出u1及对应节点q和最大类间隐层输出u2:
(4)将u1和u2分别与类内匹配系数α和类间分离度系数β比较,判断隐层对新样本的类内匹配能力和类间分离能力。若u1≥α且u2<β,可以认为新样本与同类节点相匹配,与异类节点可分离,将此样本合并到有最大输出的节点,并修正该节点的联接权系数
式中,mq为归入第q个节点的样本数。
如果u1<α或u2≥β,说明新输入样本与现有同类节点不能很好匹配或当前隐层对该样本产生了模糊,则增加一个隐节点,即
返回(2),直到所有的训练样本全部学习完成为止。
(5)计算损失函数:
若J收敛,则训练终止;否则,返回(2)继续训练。
(6)计算核函数半径:
类内匹配系数α和类间分离系数β的值由训练样本确定。
4.3 输出层参数训练
对于输出层的参数采用LMS算法进行训练,具体过程如下:
(1)初始化连接权w2,k(j);
(2)利用样本训练对(x,d)计算隐层输出
(3)计算输出层输出
(4)计算输出层误差
(5)调整权系数
(6)返回(2),直到系数调整结束为止。
5 径向基函数神经网络在识别舰船时的参数确定
径向基函数神经网络是二层网络,只要隐节点数量足够,就可以逼近任何多元连续函数。所以RBF网络的设计,就是确定隐节点数量以及各个隐节点的参数和输出权系数。
5.1 确定输入、输出神经元数量
由于设计的分类器输入是目标舰船的总声源级和轴频频率两个特征量,则输入神经元数量N=2;同时分类器是对潜艇、大型水面舰船与小型水面舰船三类目标进行分类,则输出神经元数量N2=3。
5.2 确定隐节点数量
隐节点数量的确定,采用4.2的自适应增加隐节点的方法。由于输出神经元数量N2=3,所以初始化隐节点数量N1=3。
5.3 确定类内匹配系数α
将学习样本按舰船类型分成三类,利用公式(8)计算每类样本对应的径向基函数。类内匹配系数α按以下方法确定
5.4 确定类间分离度系数β
β的计算方法类似于α
6 舰船类型识别分类结果
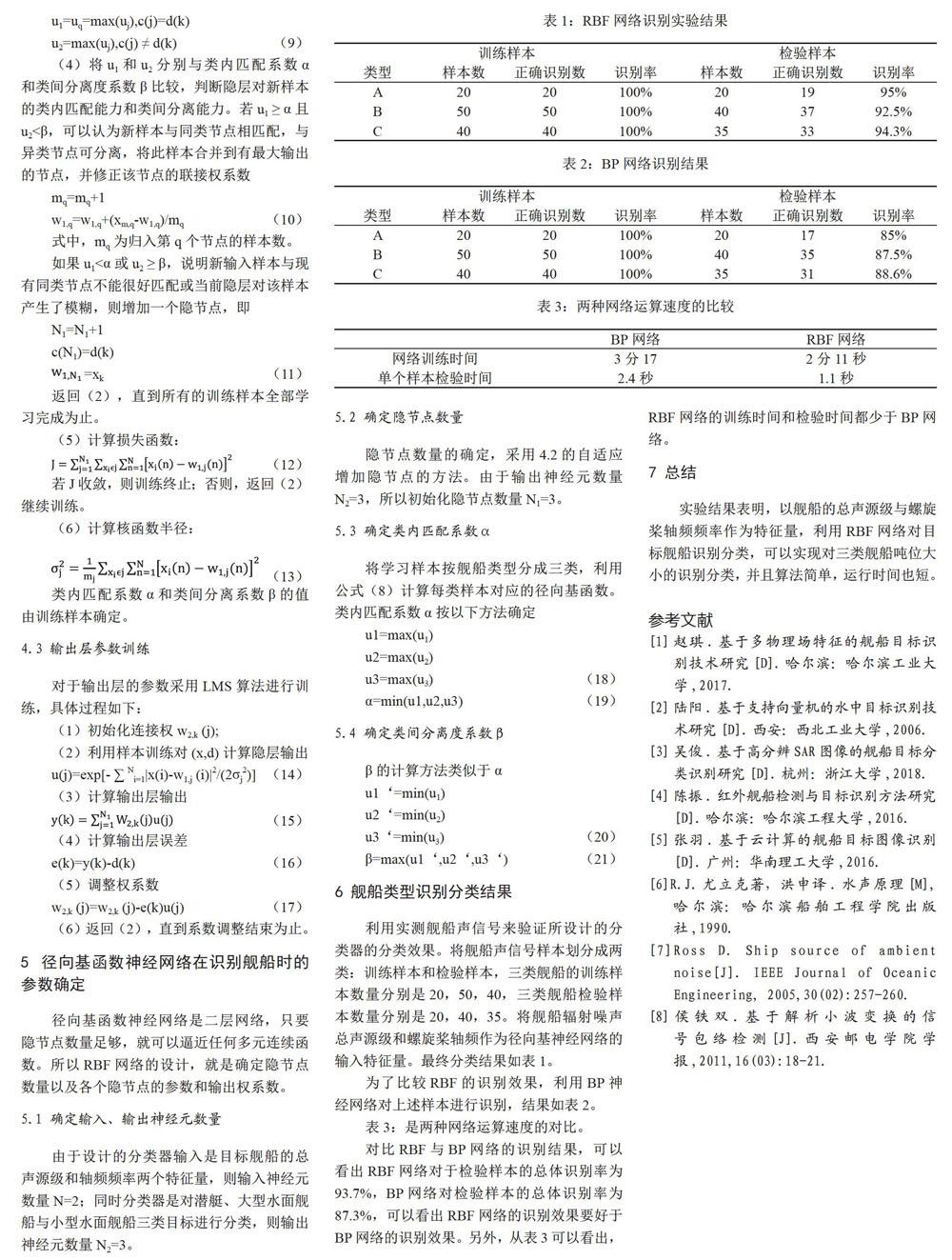
利用实測舰船声信号来验证所设计的分类器的分类效果。将舰船声信号样本划分成两类:训练样本和检验样本,三类舰船的训练样本数量分别是20,50,40,三类舰船检验样本数量分别是20,40,35.将舰船辐射噪声总声源级和螺旋桨轴频作为径向基神经网络的输入特征量。最终分类结果如表1。
为了比较RBF的识别效果,利用BP神经网络对上述样本进行识别,结果如表2。
表3:是两种网络运算速度的对比。
对比RBF与BP网络的识别结果,可以看出RBF网络对于检验样本的总体识别率为93.7%,BP网络对检验样本的总体识别率为87.3%,可以看出RBF网络的识别效果要好于BP网络的识别效果。另外,从表3可以看出,RBF网络的训练时间和检验时间都少于BP网络。
7 总结
实验结果表明,以舰船的总声源级与螺旋桨轴频频率作为特征量,利用RBF网络对目标舰船识别分类,可以实现对三类舰船吨位大小的识别分类,并且算法简单,运行时间也短。
参考文献
[1]赵琪.基于多物理场特征的舰船目标识别技术研究[D].哈尔滨:哈尔滨工业大学,2017.
[2]陆阳.基于支持向量机的水中目标识别技术研究[D].西安:西北工业大学,2006.
[3]吴俊.基于高分辫SAR图像的舰船目标分类识别研究[D].杭州:浙江大学,2018.
[4]陈振.红外舰船检测与目标识别方法研究[D].哈尔滨:哈尔滨工程大学,2016.
[5]张羽.基于云计算的舰船目标图像识别[D].广州:华南理工大学,2016.
[6]R.J.尤立克著,洪申译.水声原理[M],哈尔滨:哈尔滨船舶工程学院出版社,1990.
[7]Ross D.Ship source of ambientnoise[J].IEEE Journal of OceanicEngineering,2005,30(02):257-260.
[8]侯铁双.基于解析小波变换的信号包络检测[J].西安邮电学院学报,2011,16(03):18-21.
