六自由度手臂机器人的捡拾动作研究
2018-02-26崔瀚文
崔瀚文
摘 要:六自由度是工业上常用的机械手臂结构,通过对机械手臂工作原理和结构的研究,完成了六自由度手臂机器人的系统设计和构架设计,分析了机械手臂的自由度,并对相关功能进行了测试。
關键词:手臂机器人;捡拾;研究
中图分类号:TP242 文献标识码:A
doi:10.14031/j.cnki.njwx.2018.02.006
手臂机器人的主要功能是在工作要求条件下精确的捡拾、移动或操纵目标零件,在实际的应用过程中,手臂机器人往往由于设计和控制关系等问题,影响到机械手臂位置的精确程度,妨碍了机械手臂特有功能的实现。通过对六自由度手臂机器人捡拾动作和相关机理的研究,分析了手臂机器人的自由度构架和控制方式,对手臂机器人的行进能力和捡拾动作的精确性做了相关试验。
1 结构及功能介绍
六自由度手臂机器人是一个可移动的综合系统,其主要功能包括了环境适应、路线规划、动作设计、人为控制以及动作执行等几个方面。手臂机器人安装在一个可移动的平台之上,能够在移动的过程中通过六自由度的条件来捡拾空间上的物体,在结构设计上,移动平台采用了四轮式结构,通过独立的电机提供动力,能通过事先规划的路线或人为的控制到达指定的工作位置,并且利用移动来配合机械手臂的捡拾动作,使机械手臂能够以更科学的姿势捡拾对应的物体,在一定程度上提升机械手臂的适应能力。
2 系统构架设计
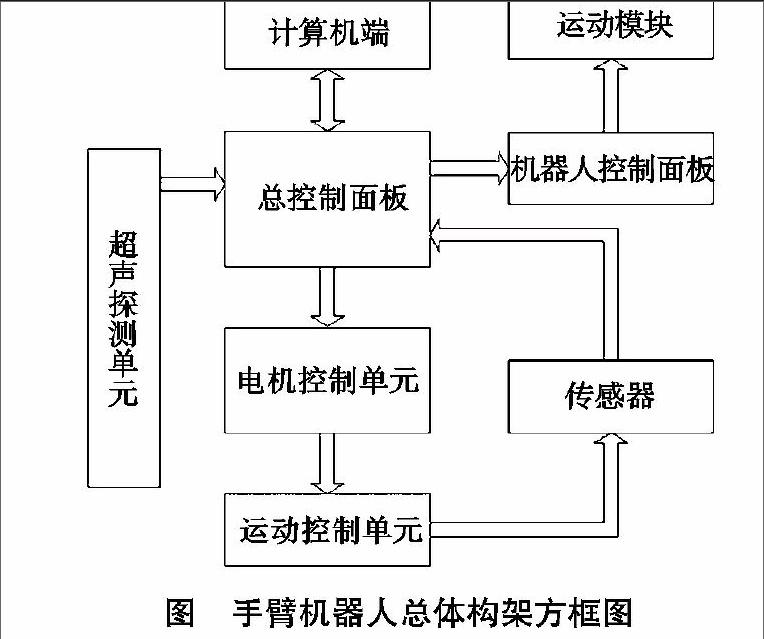
六自由度手臂机器人能够通过其自主移动和多向运动有效代替人力劳动,具有高效稳定的特性。下图是手臂机器人的总体构架设计,主要包括:计算机控制端、总控制面板、电机控制单元、运动控制单元、手臂控制面板、辅助的探测单元及传感器等。总控制面板包含了微处理器和多种数据接口,能够处理各种信息和数据,并对其他功能单元实现协调与控制;电机控制单元能够根据传感器的反馈实时控制机器人的行进速度,并配合机器人控制面板实现对捡拾动作的精确控制。
3 手臂构架设计
由于在三维空间中必须有6向自由度才能实现全部位置的捡拾作业,因此六自由度的机械手臂具有很好的实用意义。若机械手臂的自由度小于6,那么它的行动能力将受到很大限制。机械手臂是机器人最重要的结构部分,关节型的机械手臂是工业领域最常用的机械手臂类型,它能够通过程序或人工控制实现近似于人体手臂的功能。
3.1 机械手臂的自由度分析
六自由度机械手臂包含了底座、手臂、手腕和捡拾器4部分,手臂的运动通过伺服电机来控制,通过手臂、手腕和捡拾器的配合实现要求的捡拾功能,主体的运动结构由3个带有转动关节的手臂以及1个可以转动的捡拾器组成,手臂的位置和对应姿态需要6个数据才能完全控制,因此机械手臂为适应所有的空间位置具备了6个自由度,而少于六自由度的机械手臂不能实现空间上的全部捡拾要求。具备7个以上自由度机械手臂在进行空间计算时没有唯一解,这就导致控制手臂运动的程序必须要从无数种运动方式中选择一条最佳方式来完成,这无异于耗费了大量的时间和计算,在工业上采用7自由度以上机械手臂的应用很少。因此,选用六自由度的机械手臂完成空间捡拾要求是合理的。
3.2 手臂控制系统介绍
控制精度对机械手臂的功能性有很大影响,想要完成空间里物体的捡拾要求,必须要对手臂的各个结构进行精确的控制,以保证手臂的各个位置与最初的设计位置相同,进而提高工作任务完成的精确程度。机械手臂的实际运动位置需要通过计算机进行空间计算获得,计算机会根据预期的目标位置计算出各个关节的旋转角度,并通过电信号的持续时间来控制不同关节的旋转角度,再通过传感器的信号反馈将数据反馈给微处理器进行验证,从而完成对机械手臂运动的控制。
4 六自由度手臂机器人的测试分析
在对六自由度手臂机器人的实际测试中,主要采用了信号接收测试、行走路线测试、避障功能测试以及捡拾功能测试这四项。信号接收测试是指对机器人发送指定的指令,观察机器人是否按照预计的方式执行相应的命令,本次测试指令共计12条,测试结果全部通过。行走路线测试主要是观察机器人在规划的或是人工控制的情况下能否按照理想的轨迹行驶,测试初期行走效果有偏差,经调整或多次试验后达到预期效果。避障功能测试主要试验当行进路线上有障碍物时,机器人能否自动躲避,测试结果满足要求。捡拾功能测试主要试验机械手臂的捡拾能力,本次试验共设计了20个捡拾点,在经过多次调整后捡拾工作的效果达到了预计要求。
5 总结
六自由度手臂机器人的结构和自由度选择有其自身的合理性,且控制方式和程序简单、容易实现,实际测试效果良好,是比较成熟的机械手臂形式,易于被工业广泛使用。endprint