机器人底盘搭载局放技术应用
2018-02-25高磊齐振忠李育灵宁晋峰王婵琼
高磊 齐振忠 李育灵 宁晋峰 王婵琼

摘要 科学技术的不断发展,使得我国进入了自动化的科技时代。现如今,我国的机器人研发技术逐渐走向成熟,由最初的只为军事化战略服务,但现在的家用服务以及学习机器人等,这证明了我国机器人研发取得了巨大的进步。在机器人研发生产的过程中,其底盘技术的设计极为关键。
[关键词]机器人 底盘搭载 局放技术 技术应用
近年来,社会的发展逐渐趋于社会化,以往曾创想的机器人时代即将到来。在国外,早已经有多类及其人被研发及投入生产及销售使用。例如,智能服务类机器人、玩具机器人以及家用机器人等。在国内,也有诸多机器人已经逐渐开始投入生产及使用。文章依据对其底盘搭载局部技术的介绍,提出的其技术应用的重点探究,对我国机器人的研发工作具有理论性的意义,对国内机器人事业在国际市场上获得的竞争优势具有现实性的指导意义。
1 机器人底盘搭载局放的相关技术
1.1 模块化技术
一般的工业或者是农业机器人其体积偏大,致使其在生产、安装以及运输的过程中都会受到体积的影响,而在后期的保养与维修上也会存在诸多困难。对于此类问题的解决,具体的方法如下:
(1)创建优秀的框架,无论是大型的机器人,还是小型的机器人,其框架的设计均是需要具有一定的科学布局的,其走线必须设计合理,才可能使其具有较好的稳定性。
(2)模块设计,此为底盘设计内容之一。在对机器人进行生产的过程中,其每一部分的设计均是有模块的,且每一模块层次分明,可拆卸,可更新,功能也均是具有独特性的。对于同种产品的机器人,其模块是可以相互更换的,依据模块的设计,最终可以完成底盘搭载设计。良好的模块技术,可对机器人的生产产生重要的影响,利于其模块理念的形成。
1.2 局放模块技术
局放模块技术,其是底盘搭载技术的核心,主要涉及到的是驱动机械臂,搭载局放技术以及局放电检测等。其具体的设计要求如下.
(1)定位,现代机器人的设计,设计人员对于其定位功能的设计十分重视。
(2)机器人的机械性动作设计,如手臂的伸出与收回等。
(3)视觉的连动性设计,机器人与人类身体的结构功能是相类似的,其本身也具有视觉的设计,而在其视觉的设计当中,其连动性的设计至关重要,该项技术的重点在于传感器的设计与调整。
2 机器人底盘搭载局放技术应用难点解析
2.1 优化机械设计
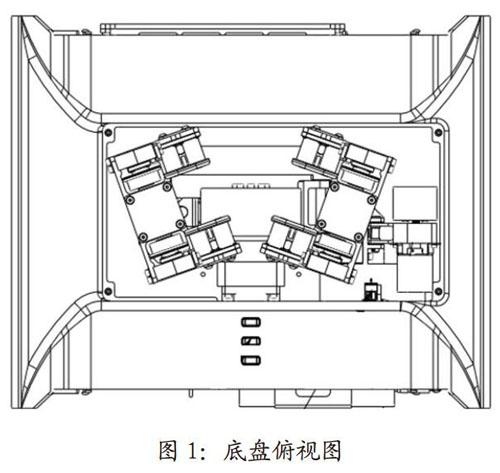
优化技术设计,其属于机器人自平衡技术的内容之一。在设计底盘时,其机械零件间的误差大小极为重要,误差值越小,则其机械间的协调性便会越高,便更利于其底盘的稳定性。零部件不同,线性排布也会存在不同,其中,底盘的线性排布十分重要,尤其是其与底盘轨道间的契合程度。图1、图2,是底盘的侧、附是视图,在垂直方向,依靠驱动力以及重力,可以使底盘与轨道紧密贴合。在水平方向上,底盘既需要和轨道的侧面进行贴合,又需要与其保持一定的空隙,利于确保机器人运行稳定。
2.2 机器人底盘搭载软件控制
机器人的底盘搭载软件控制主要包括的机械臂的伸缩控制、机器人底盘垂直升降的控制以及机器人水平移控制。机器人底盘搭载软件控制涉及到空间三维运动向量。从机器人底盘搭载软件控制的角度出来,为了确保机器人在运动的过程中,能够在确保自由度的前提下,对其零部件进行结构上的补充,从而提升稳定性。机器人底盘搭载软件的控制,应实现主动轮接触面积大、负載大以及重心低的特点,从而提升防滑能力,对此,应提升底盘搭载软件控制的水平,从而确保及其人底盘搭载软件控制的质量。
2.3 结构与平衡间的关系
机器人在执行命令的过程中,运动的控制需要与机器人的体态特征情况以及运行命令的和任务的分类相结合,只有这样才能有效的提升机器人运动的稳定性。在机器人底盘搭载局放技术的应用过程中,需要确保其日图案件系统能够针对不同的巡视位置进行不同的运动的速度,包括机器人运动的巡视的类型以及巡视点的数量。此外,机器人的体态特征也是机器人运动速度控制的重要因素之一。
3 结论
言而总之,据相关人员的介绍,对于机器人的设计,其底盘搭载技术的应用的关键,机器人之所以能够站稳,其功劳均归于底盘搭载技术设计的科学性与合理性。而在其底盘设计的工作中,其设计的相关技术有诸多种。而每一种技术其在施工的过程中,都是具有一定的技术难点的。文章针对其底盘设计具有模块化技术及局放模块技术等,提出了优化机械设计、机器人底盘搭载软件控制以及结构与平衡间的关系等难点探析,希望能够为机器人底盘的设计提供帮助。
参考文献
[1]王浩,工业机器人技术的发展与应用综述[J].中国新技术新产品,2018,21(03):109-110.
