搬运机器人在印刷装备智能制造中的应用
2018-02-17
随着中国制造2025和德国工业4.0的发展,传统的制造行业已经慢慢淡出了人们的视线,从过去传统的报纸到现今的精美画册以及对互联网的使用,这无一不印证互联网+和自动化时代的到来。历史上每一次工业革命都使得世界飞速发展,而自动化技术就如同工业革命,它将会给工厂带来飞速发展。
自动化技术是传统工业与现代工业的连接纽带,自动化智能制造已经成功地普及到矿山、轻工、电力、汽车制造等工业领域,并成功取得了突破性的发展。对于印刷行业的制造业来说,智能制造已经开始慢慢地渗入到制造工厂,但是对比国外的印刷智能制造,我国存在很大差距。国外已经做到了全自动智能生产,生产效率和生产质量是非常顶尖的,因此产品也受到了很多客户的青睐。国内知名的印刷企业使用的都是进口印刷机,比如海德堡、曼罗兰、小森等知名品牌。国内的印刷机制造业虽不如国外,但也在飞速发展,慢慢跟上了国外的发展脚步。
在这个传统制造行业渐渐被自动化生产线所取代的时代,印刷装备制造业也要跟上时代的步伐,要不断吸取当代智能制造所带来的便利,以此来改善传统印刷制造行业。
本文尝试以加工印刷机某零件为研究对象,通过机械臂、红外传感器、Arduino控制板、360°旋转舵机、码垛机械臂等组成的智能制造工艺系统。该系统实现了零件在加工过程中机床之间的自动化搬运、翻转、堆垛等功能。大大节省了人力,降低了人力搬运过程中所发生的零件损坏率和一些不安全因素,提高了生产效率。
智能制造工艺系统构成
在印刷机生产制造过程中,涉及到很多常用的加工方法,有对应的加工方法就有对应的车床来加工部件。其实印刷机智能制造系统是利用机械手段把车床连接起来,组成的由电脑PC端控制的一种自动加工系统,它包括电脑远程控制模块、车床的控制工艺系统模块、车床之间连接所需要的机械的控制工艺系统模块三大模块。
在印刷机小零件(如印刷机轴承盖)加工制造时,虽然部件体积很小,但在加工制造时很不方便。如果靠人力去翻转加工或者在车床之间来回搬运就会显得很不便捷,而且效率特别低。所以如果在车床之间加入一个机械手再加入一个回转工作台就可以直接生产出产品,最后再加一个入库堆垛机械臂就可以做成智能生产制造这类小零件的系统。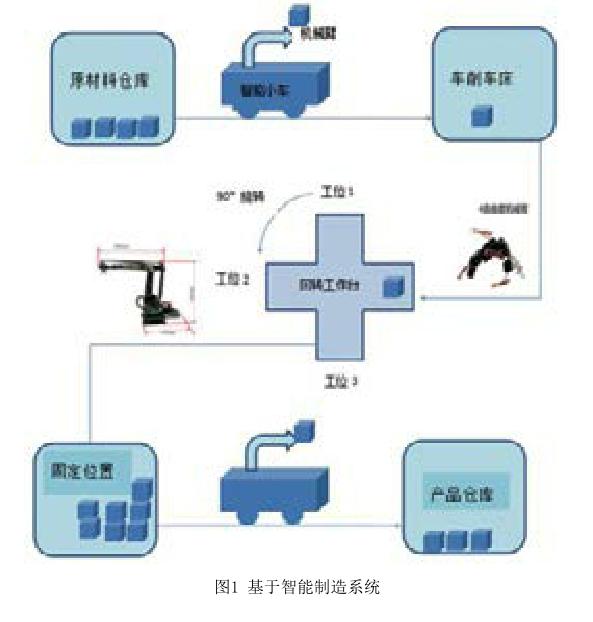
如图1所示,这是本次模拟设计的智能制造车间机床、机械臂位置分布图,此图包含了加工印刷机轴承所有工艺系统,从原材料到成品一步一步的加工过程都非常清楚。
在智能生产系统中,机械臂的工作对象一般为集中起来的一些加工部件,在一定情况下这些部件的形状、大小、质量都不一样,故多采用夹钳式的手爪,保证物体能被牢固夹起不掉落并转运到工位上,且不影响工作的正常进行。
由于在工业生产过程中,现场的生产情况也属于不可控的,随时会有许多的障碍产生,极有可能会对小车的行进路线产生阻挡,同时生产过程随时都有可能发生突发状况,必要时需要小车及时躲避障碍,不影响自身的运行,故小车需具有可循迹避障的功能。
控制系统构成
本次设计所采用的机械臂系统基于Arduino UNO微处理器,采用单CPU集中控制方式利用其强大的运算和处理能力进行系统的控制,完成预定工作。本设计采用的机械臂控制系统为单CPU集中控制,系统框图如下: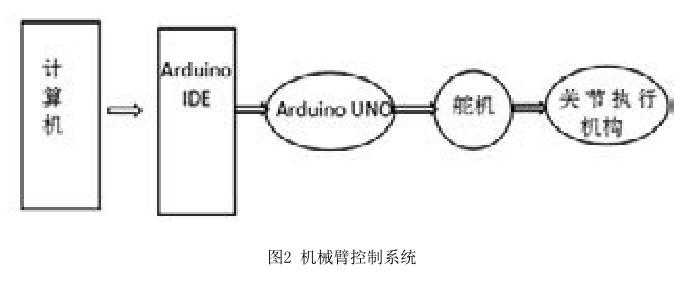
计算机用于完成整个系统的管理、发送指令、运动轨迹规划等。计算机通过Arduino IDE将程序烧录至Arduino UNO微处理器,向关节控制系统发出指令,Arduino根据指令输出PWM波,从而使机械臂的各个关节旋转指定的角度,进而按照预定规划的轨迹完成搬运工作。
本次设计的通过以Arduino微处理器为核心的机械臂控制系统,对直流伺服电机(舵机)进行较为精确的运动控制,其主要是通过微处理器内的PWM单元产生的PWM信号来完成伺服电机的精确定位。采用此控制系统可降低功耗,增强了运算能力,同时采用直流伺服电机驱动各个关节,比较简单准确。
机械臂小车现如今在越来越多的产业中应用,其单机控制系统的研究已经有了很长的时间,但是多级联合工作的还不多,印刷中很少采用。目前无论是在教学还是工业应用中其都有着很重要的意义,但距离技术成熟的应用还有很长的一段路要走。
本设计是以Autolabor小车为基础,以Arduino自由度机械臂控制为主要对象,对其系统的硬件进行设计和研究,并在此基础上,采用合适的控制系统方法,进行了软件系统的设计。在整个设计中,以机械臂的硬件和软件的设計为重点,控制芯片的选型为保证,以机械臂和小车的串口通信控制为辅,在保证系统的可靠性和稳定性的情况下,通过编写控制程序来完成对各个部件的控制。本次设计也表明基于Arduino控制板能够完美地契合对中小型机器人的控制要求,无论是在灵活性还是控制精度上都可以表现出良好的性能,但仍有一些不足之处需要改进。
①小车的自动巡航。作为机械臂工作时的基础,其本身的性能决定了机械臂在实际应用中的效果。本设计采用的小车的自动巡航部分仍有待开发,加入一些摄像头模块,可以为小车的控制提供更为完整的信息。
②自动控制的算法的研究。为了更完美地实现机械臂的自动调节,往后对控制算法的要求会更高,尤其在机械臂逆向运动学方面的算法需要更加优化,这样计算出的控制参数才具有更高的精准度。
③小车的控制精度。虽然现在小车可以实现路径规划和自动避障,但是由于其控制系统不够完善,小车在到达目的地后无法自动将机械臂停靠在面对工作台的一面,需人工操控,后期可加入一些超声波探测模块来完成这类工作,增强小车的控制精度,使其在工作时更加简单实用。
总结
在现如今人工智能快速发展的大背景下,对机械臂的要求不仅仅满足于简单的搬运,所以对机械臂的结构、性能的进一步研究与探索则更为迫切,比如加入可以感应环境变化的传感器和智能的自动控制算法,在不需要人控制的情况下,其可以自动进行更优化的计算,随着环境的变化可以进行自身的调节。
智能化印刷设备、智能印厂是印刷行业发展的趋势所在,各种新技术层出不穷,印刷行业也会随着技术的发展进步而不断发展进步。机械搬运小车、机器人将来在制造业中一定会发挥越来越重要的作用。
