基于IRN神经网络的雷达天线伺服系统故障诊断
2018-02-15薛松,刘涛
薛 松,刘 涛
(1. 西安电子科技大学, 陕西 西安 710071; 2. 上海宇航系统工程研究所, 上海 201109)
引 言
机械故障监测技术的研究起始于20世纪60年代的美国机械故障预防小组以及后来的英国机器保健中心。经过几十年的发展,机械故障监测技术在各个领域逐步得到普及,如飞机机身复合材料的健康监测,机床主轴加工及寿命预测,转子裂纹的预测以及齿轮、轴承等典型旋转零部件的故障诊断等[1]。
雷达工作在各种不同的复杂环境中,主要包括气候环境、机械环境以及电磁环境。环境条件对雷达的工作性能以及寿命都会产生严重的影响。在恶劣的气候环境(高温、高湿、盐雾及霉菌)中,雷达设备中的金属材料极易受到腐蚀和锈蚀,从而导致机械性能下降以及因各接插件接触不良产生的短路。在机械环境中,长期的振动或多次冲击也会使设备产生疲劳破坏,最终导致结构上的破坏。例如,炮瞄雷达和制导雷达在使用过程中要承受炮弹和导弹发射产生的振动和冲击,会使雷达的可靠性降低。雷达的电磁干扰主要来自内部元器件的干扰以及外界的电磁干扰。严重的电磁干扰不仅会严重影响雷达的性能,还会危及人员的安全[2-3]。因此,针对雷达系统的故障诊断能帮助人们快速找到并更换故障部件,更能保证雷达装备安全有效地运行。
雷达伺服装备的故障监测研究起始于21世纪初,其理论水平以及系统应用率远远低于故障诊断在其他领域的理论水平和应用率。在国内,文献[4]针对舰载雷达自身特点,设计了基于故障树的雷达伺服装备专家系统。该系统操作简单,但灵活性较差,诊断效率低。文献[5]基于VXI总线和集成技术,研制了某型雷达装备诊断专家系统,其缺点是不能对复杂雷达系统进行故障分解。文献[6]基于多普勒天气雷达系统装备了故障诊断软件。该诊断软件反应快,定位准,但虚警率较高。近几年来,人工智能技术得到了长足的发展,将人工智能与雷达传统的故障检测结合起来成为一种新的发展趋势[7-8]。本文针对雷达天线伺服系统,采用内部回归(Internally Recurrent Network, IRN)神经网络对雷达天线伺服系统进行故障分析,研究结果进一步提高了故障诊断的准确性。
1 雷达天线伺服故障分析
雷达天线伺服系统主要由电子控制设备以及机械传动系统组成。电子控制设备给定雷达需要的运动规律和运动位置,之后控制天线机械传动系统按照给定的规律自动转动以达到捕获、跟踪目标的目的。图1是CINRAD/SA型雷达交流数字伺服系统角码和速度信号流程图[9]。从图中可以看出,天线主要受到来自俯仰以及方位电机的控制,而2个方位的信号又通过光纤以及数字板传递到DAU大底板上,最后传递到RDA计算机上。RDA计算机也通过相同的路径实现对天线的控制。图2是图1中角码信号的流程图[9]。从图中可以清楚地看到角码信号从俯仰和方位2个方向汇流到伺服监控单元的整个流程。角码信号依次通过电机、减速箱、大齿轮、同步机、光码盘、编码器、光纤以及DAU,最后传递到监控单元。

图1 雷达交流数字伺服系统角码和速度流程图

图2 交流数字伺服系统角码信号流程图
在雷达天线伺服系统中,较常见的故障形式主要包括天线定位精度差、转速不稳定以及雷达角码异常等[9]。这些故障形式是由不同的故障部位引起的。为了寻找故障根源,本文拟采用故障树分析法对雷达天线伺服系统故障进行分析。该方法是将故障原因从总体到局部逐级细化的多层次分析方法。通过分析雷达伺服系统的速度流程图和角码信号图,可以掌握雷达天线伺服系统的总体工作流程,因此一旦出现故障,可以方便地找出所有可能的故障部件。图3为天线失控或角码异常的故障树图。从图中可以看出,天线失控或角码异常主要是由使能控制信号不正常或角码闪码或天线不动或伺服自检错误造成的。而这些原因又是由其他因素造成的,如此一级一级地构成天线失控的故障树。例如,天线失控的一个原因是角码闪码,而角码闪码主要由俯仰闪码或方位闪码造成,其中,俯仰闪码主要由光纤链路故障、DAU故障等5方面造成,而方位闪码主要由惯性链路故障、轴角盒故障等造成。通过图3还可以看出,不同故障最终有可能源于同一故障部件,例如惯性链路故障可能同时造成天线罩门开关信号不正常、锁定信号不正常以及角码闪码和天线不动。因此对故障树的最终故障进行分类编号对理解天线失控具有重要意义。依据此故障树模型,分类总结雷达天线的故障部件并对其进行编号,见表1。

表1 雷达天线故障模式

图3 雷达天线失控或角码异常故障树图
2 IRN神经网络
神经网络是模拟人脑结构的一种数学模型,因其具有良好的分类功能,在故障诊断领域得到了广泛应用。有关神经网络的研究仍在发展之中,已经提出了很多神经网络模型,但研究和使用最多的神经网络模型仍是BP算法的向前传播模型,亦称BP网络。在BP网络的基础上,加入反馈信号及偏差单元,生成IRN神经网络[10]。图4给出了带有偏差单元的递归神经网络模型的结构,它由3层节点组成:输入层节点、隐含层节点和输出层节点,2个偏差节点分布被加载到隐含层和输出层上。隐含层节点不仅接收来自输入层的输出信号,还接收其自身的延时输出信号,称为关联节点。
设NH和NI分别为隐含层节点数和输入节点数,Ij(k)是带有偏差单元的递归神经网络在时间k的第j个输入,xj(k)是第j个隐含层节点在时间k的输出,Y(k)是带有偏差单元的递归神经网络的输出向量,则带有偏差单元的递归神经网络可由如下3个数学公式描述:
(1)

xj(k)=σ(Sj(k))
(2)
式中:Sj(k) 为第j个隐含层节点在时间k的输入;σ(Sj(k))为隐含层节点的非线性激活函数。
(3)


图4 带有偏差单元的递归神经网络结构
3 IRN神经网络在雷达天线伺服故障中的应用
本文利用IRN神经网络分3个步骤对雷达天线伺服系统进行故障诊断。首先,建立IRN神经网络,赋予网络的节点连接权值初始值;然后,利用样本训练对IRN神经网络的各个连接权值进行训练直至达到收敛稳定为止;最后,利用训练好的IRN神经网络对输入的故障进行诊断,判别故障类型。
依据表1给出的故障模式,建立IRN神经网络可以利用的测试编码和故障编码。用IRN神经网络来实现故障分类,IRN神经网络输入层有23个神经元对应23个测试点,输出层共有4个神经元,隐含层共有20个神经元。以表2中的测试编码作为网络输入,以故障编码作为网络输出。第1层学习率为1.5,第2层学习率为1.5,输入偏差学习率为1.0,输出偏差学习率为3 000。
图5是本文建立的IRN神经网络的训练误差曲线收敛图。从图中可以看出,经过22次IRN神经网络学习,学习精度优于6.4e-07,满足所设计的神经网络要求。
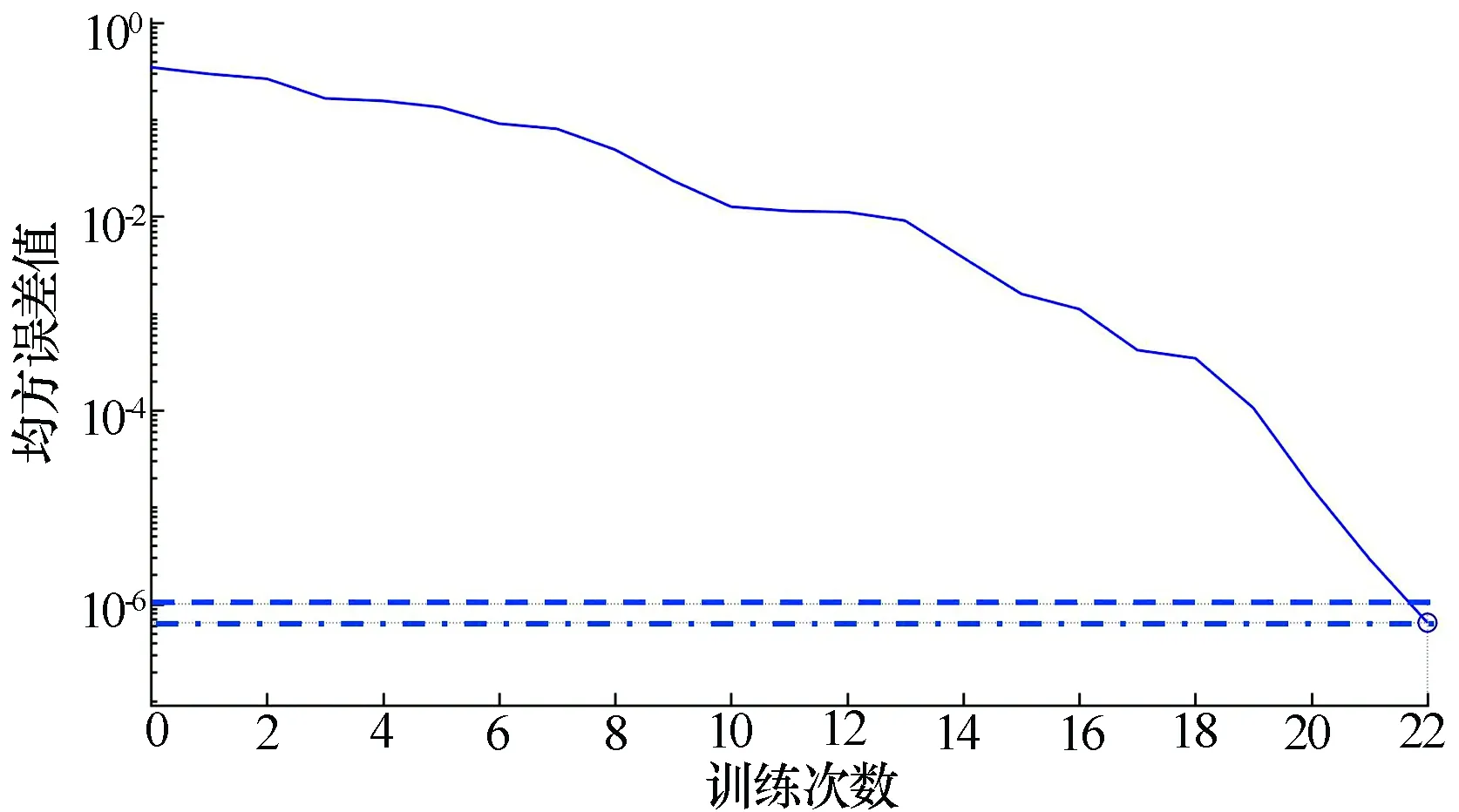
图5 训练误差曲线图
表2是计算机仿真输出的故障诊断结果。Bit 1~Bit 4为故障编码,不同的故障编码组合表示不同的故障名称。例如编码0001表示天线罩门开关故障,编码1111表示天线正常。表2中的故障名称与表1中的故障名称相对应。从表2可以看出,IRN神经网络能够较好地对各个故障进行区分并分类。
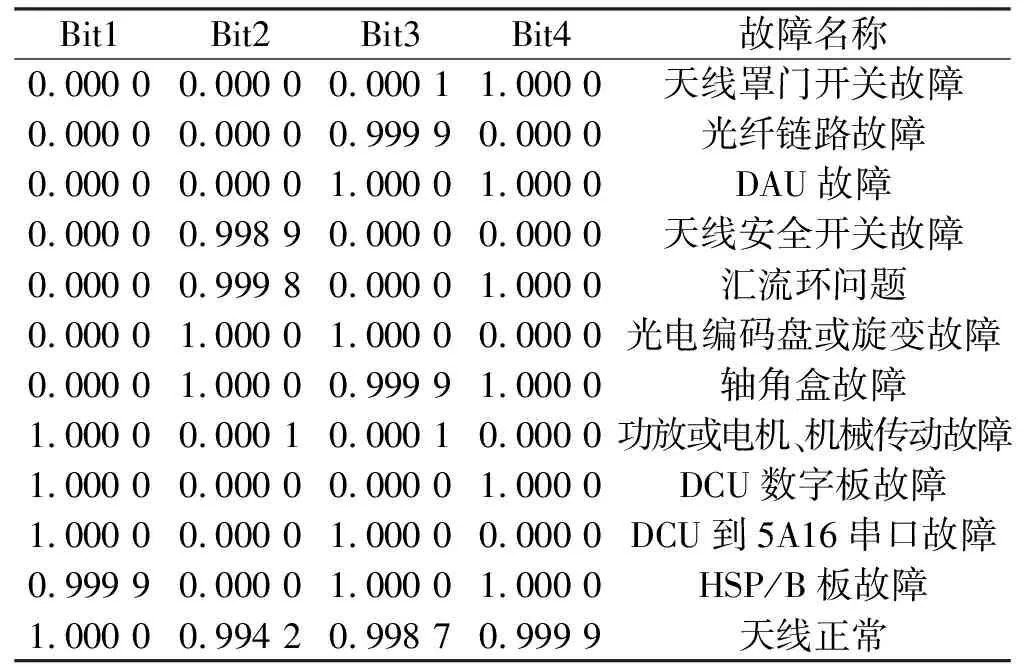
表2 计算机仿真输出的故障诊断结果
4 结束语
为了提高雷达天线伺服系统故障诊断的智能化水平,本文建立了基于IRN神经网络的故障诊断系统。通过故障树的分析手段,找到所有可能发生故障的部件并按一定的因果关系分层。通过对部件的进一步编号,将输入样本和目标样本输入到IRN神经网络当中,并对其进行训练。最后,对所训练的IRN神经网络进行测试,分析发现IRN神经网络能够很好地对各个故障进行分类并将它们区别开。虽然本文的研究对象为伺服系统,但所采用的研究手段也可用于雷达其他子系统乃至整个雷达系统的故障诊断研究。
本文的主要难点之一是工程训练样本的获取。因为利用神经网络进行故障诊断的关键在于训练样本的准确性,因此大量现场的工程样本对于本文所建立的神经网络的训练非常重要。然而,到目前为止,并没有公开发表的雷达伺服系统故障数据可以作为本文的输入样本,同时现场获取故障数据需要大量部门的协调,因此本文只是通过对故障形式进行编号作为训练样本对神经网络进行训练。
雷达天线伺服系统的故障诊断研究对雷达装备的性能保障具有重要意义。故障诊断能够及时、准确地对各种异常状态和故障状态做出诊断性预防,将雷达故障损失降至最低,还能帮助管理人员制定合理的检测维修方案,延长雷达服役寿命,降低雷达设备全寿命周期费用。本文初步探讨了利用人工智能手段对雷达伺服系统进行故障诊断的有效性,后续工作可以主要从以下几个方面考虑:
1)研究雷达伺服系统的故障机理。雷达伺服系统是由电子设备和机械设备组成的,因此其故障机理也是多种多样。正确掌握并了解伺服系统的故障机理对雷达故障诊断具有重要的意义。
2)研究故障特征提取手段。由于雷达伺服系统电子设备和机械设备的多样性,其监测手段也必将是多种手段相互结合。如何正确提取各个设备的故障特征也是雷达故障诊断研究的重点。
3)继续推进雷达故障诊断的智能化。各类神经网络的出现大大提高了故障诊断的准确性,然而大量训练样本或大量工程现场实测数据的获取问题,仍然是雷达故障诊断智能化前进的阻力。
