三维激光扫描技术在公路边坡稳定性监测中的应用研究
2018-02-14张利
张 利
(山西省交通科学研究院,山西 太原 030006)
随着社会各项事业快速发展,公路交通建设也在向标准更高、安全性更好、服务水平更优、路网结构更加完善的目标发展。作为交通发展基础的公路建设也受益于科学技术的进步,越来越多的先进技术服务于公路建设工程中。当公路穿越山岭区时,不可避免地出现高填深挖路基,形成高边坡,受高边坡自身地质构造、车辆扰动、雨水冲刷等因素的影响,有些边坡产生滑塌、坍塌等病害,轻者造成交通中断,重者危及生命财产安全,因此在施工期及运营期进行必要的高边坡稳定性监测是非常必要的,三维激光扫描技术作为一种日趋发展成熟的技术,其精度已经可以满足高边坡变形监测的要求,本文讨论三维激光扫描技术在公路边坡稳定性监测中的应用。
1 边坡稳定性监测基本理论
运用三维激光扫描技术进行边坡稳定性监测的基本原理就是根据边坡坡面不同时期的三维地形差分求得坡面变化的部位及变化量。具体实施即按不同周期采集边坡数据,通过分析比对每一周期采集到的边坡数据了解边坡变形情况,根据连续多期数据判断边坡变形量及变形速率。因此,边坡稳定性监测是一项长期并需要不断重复的工作,要求数据采集准确可靠,数据分析理论合理适用。
传统的数据采集方法主要靠全站仪、GPS、倾斜仪、收敛仪等仪器对已布设好的监测网点进行数据采集[1],采集到的数据受采集人员的经验,监测网点的密集程度等因素的影响较大,三维激光扫描技术运用先进的高性能激光技术结合高速扫描装置可以快速、高效、准确、海量地获取扫描数据,且操作简单,受人为因素影响小。
2 边坡稳定性监测的实施方案
边坡监测数据处理流程如图1。
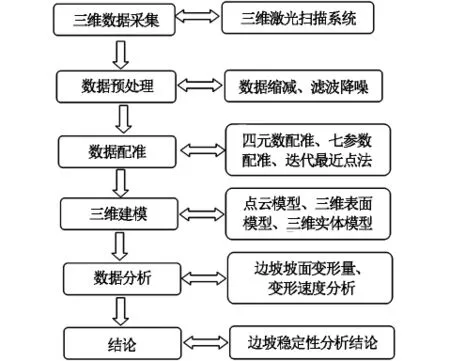
图1 边坡监测数据处理流程图
2.1 数据采集
由边坡稳定性监测基本理论知道,数据采集工作是周期性的且数据采集精度要求高,因此运用三维激光扫描仪进行数据采集需优先采用固定式地面三维激光扫描系统,考虑后期数据处理的难度,降低数据采集及处理带来的误差影响,应于监测路段设置强制对中观测墩(图2左)提供稳定的监测基准点[1]。强制对中观测墩应设置于稳定处,挖方路段可设置于硬路肩处设置为隐藏式,填方处可根据稳定,便于保存和使用的原则设立。另外,每一监测路段应设置不少于3个监测基准点,以核查监测基准点稳定性。
图2右侧黑色五角星为某山区公路于高边坡处布设的监测基准点,监测基准点的布设距离及密度受公路线形、边坡情况及地形控制。
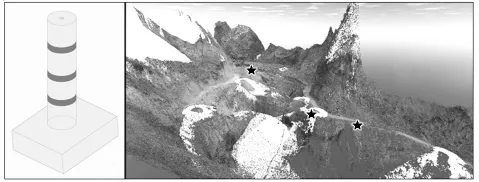
图2 某山区公路强制对中观测墩的布设位置
2.2 数据预处理
三维激光扫描数据预处理主要包括:数据缩减、数据滤波、坐标配准。大量的点云数据会降低后期数据处理和模型生成的效率,因此需要进行数据缩减,数据缩减常用方法一是通过设置扫描采样间隔减少数据采集量,二是通过一定的算法进行数据压缩,如包围盒法、均匀网格法、随机采样法、曲率采用法等[2]。

图3 均匀格网法模型
公路边坡是一个规则的带状地物,综合考虑公路边坡自身特性及边坡稳定性监测的要求,深入研究数据压缩算法适用性后,本文认为均匀网格法用于边坡稳定监测数据缩减具有一定的优势。图3左侧为公路边坡模型,图3右侧为山区公路某一段落边坡采用均匀格网法模型,根据公路边坡坡面情况,将扫描所得到的点云数据进行数据压缩。
三维激光扫描获取的点云数据受到人为或随机因素的影响,会产生噪声点。噪声点的来源主要有三类,一是路基边坡坡面因素产生的误差引起的噪声点;二是扫描系统自身误差所引起的噪声点;三是随机因素引起的误差造成的散乱噪声点。噪声点的存在对模型的质量和精度均造成直接影响,因此需要采用一定的算法减少噪声点,常用的有高斯滤波、中值滤波、平均滤波等。高斯滤波是指在某一区域内的权重为高斯分布,其平均效果较小,因此在滤波的同时能较好地保持原数据的形貌。本文研究认为高斯滤波用于处理第一类和第二类随机误差,而第三类随机误差则需要根据实际情况结合数字影像数据采用手动剔除。
坐标配准是三维激光扫描数据处理过程中的重要环节,一般分两步,首先把不同仪器坐标系下的点云数据纠正到同一个仪器坐标系统下,然后把仪器坐标系统纠正到变形监测控制网中即把扫描的点云数据放入同一坐标系统。坐标纠正需要在扫描区域内设置标靶点,使相邻区域扫描点有3个以上同名标靶点,通过标靶点的强制附合,将相邻的扫描数据统一到一个坐标系下[2]。常用的数据配准算法包括:四元数配准法、七参数配准法、迭代最近点法等。四元数配准[2]数据处理过程是严密的数学解算公式,不需要迭代就可以直接求解刚性变换。刚性变换满足某一扫描点i在仪器坐标系1中的三维坐标和监测控制网2中的三维坐标满足式(1)关系:

设一个四元数 q 为四维向量 (λ0,λ1,λ2,λ3)T,可以分解为一个标量α和一个向量γ共同组成,其α为一个值为 x 的实数,γ 是三维向量(λ1,λ2,λ3)T。一个实数x对应与四元数(x,0,0,0),而一个三维向量γ则对应于四元数(0,γ)。三维旋转矩阵R和三维向量γ的乘积可以写成四元数相乘的形式:

得到旋转矩阵R和相应的单位四元数q之间的关系为:

四元数配准算法作为一种精密的数据处理方法,适用于不同仪器坐标系下的点云数据纠正到同一个仪器坐标系统,而仪器坐标系统与边坡监测控制网坐标系统的转换则可以选用七参数配准法,其基本原理为仪器坐标系统分别绕自身的x、y、z轴连续选择3个角度后,使得三轴方向与监测网坐标系统的三轴方向一致,再把坐标原点移动到监测控制网坐标系的原点,因此,点云数据的坐标变化需要解决7个参数:3个旋转参数,3个平移参数、1个尺度缩放参数。坐标变换公式为:

其中 A 为尺度缩放参数,Rx(α)Ry(β)Rz(γ)为旋转矩阵,如式(5):

由式(5)知道,在两幅相邻点云数据转换中,需要3个以上同名已知坐标值,求解旋转、平移及尺度缩放参数。
三维激光扫描数据经过数据压缩、误差处理及坐标配准后得到的点云数据如图4所示,图4左为点云数据平面展点图,图4右为点云数据三维展点图。

图4 处理后的点云数据
2.3 数据建模
由三维激光扫描数据重建的三维模型是根据获取的点云数据,经过数据处理,对公路边坡坡面进行实体造型,以获取三维模型,根据三维模型的用途,考虑其使用直观方便,三维实体模型(图5)相比较三维表面模型(图6)和三维线框模型,更加适合用于公路边坡坡面变形监测。
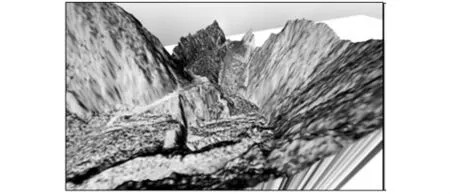
图5 三维实体模型
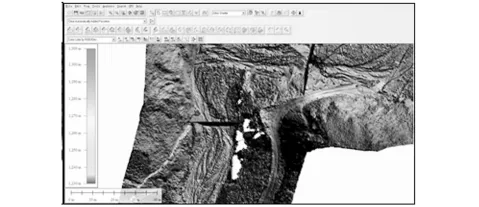
图6 三维表面模型
2.4 误差分析
用于变形监测的数据要求具有较高的精度。因此,采用三维激光扫描数据进行公路边坡稳定性监测要求获取的数据可靠且精度满足要求,解算出的数据能正确反映边坡的稳定情况。根据三维激光扫描仪的工作原理及数据解算采用的模型算法以及误差源的不同,误差可以分为三类:系统本身的误差、测量误差和坐标配准误差。
扫描系统本身误差又包括系统误差和偶然误差,系统误差可以通过一定的公式或算法进行消除或者减少;偶然误差因具有随机性质需要在数据采集及处理阶段采取一定的措施来消除或者减少偶然误差。测量误差则主要包括测距误差、扫描角度的误差、外界环境条件的影响造成的误差等,这些误差均具有偶然性,因此,在数据采集的过程中要严格按照程序进行,尽可能降低偶然误差对数据精度的影响。坐标配准误差是数据处理阶段产生的误差,采用的模型和设置的参数均对数据处理精度造成影响,因此,需要根据不同的项目特性进行研究,选取合适的模型和参数以降低数据处理带来的误差影响。
本文中的山区公路边坡扫描数据精度评定指标采用所有标靶点(剔除疑似变形点后)的中误差,根据已获取的三维激光扫描数据处理结果可知其精度可以达到边坡稳定性监测中采用的三角高程测量的精度要求。
3 结语
采用三维激光扫描技术监测公路边坡稳定性,边坡信息的获取和分析是边坡监测的主要内容,主要研究边坡时空四维信息的获取以及对这些信息的分析。边坡破坏的预测以及边坡破坏的状况都需要及时地实时掌握边坡体的三维形状。三维激光扫描技术是一种新的方法,提供了一种新的监测手段。随着科学技术的不断进步,运用三维激光扫描技术监测公路边坡稳定性将更加智能化、精细化。
